Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Dr. Christoph Michlmayr
FA für Orthopädie 4150 Rohrbach, Stadtplatz 26

2
Stabilisation von Gelenken
Dr. Christoph Michlmayr

3
Jedes Gelenk braucht Stabilität um zu Funktionieren.

4
Was ist Stabilität? Stabilität = Bewegungskontrolle = Schmerzkontrolle

5
Stabilität Ein Gelenk braucht Stabilität um zu funktionieren
Wie definiert man Stabilität? Instabilität =anhaltende nociceptive Quelle

6
Sportliche Leistung Wichtigste Grundlage ist das Gleichgewicht
Gleichgewicht = globale Stabilität

7
Core stability Für viele Sportarten wichtig
Ca. 2/3 der Stabilität stammen von der Muskulatur (Wilke et al, 1995)
")
8
Stabilität 1/3 der Stabilität kommt aus passiven Strukturen
2/3 der Stabilität kommt aus der Muskulatur

9
Bewegungskontrolle Bewegung des Körperschwerpunktes
Posturale Aufrichtung, Gleichgewicht Bewegung zwischen Körperabschnitten Axiale Aufrichtung, Gleichgewicht Bewegung zwischen einzelnen Wirbelsgegmenten

10
Stabilität Gleichgewicht = globale Stabilität
Segmentaler Schutz = lokale Stabilität

11
Der menschliche Körper
ist zu tiefst ökonomisch!

12
Bewegungsökonomie Die neutrale Zone
Der Reibungswiderstand zwischen 2 synovialen Gelenkflächen ist geringer als zwischen 2 Eisplatten Weniger Belastung Mehr Bewegungsökonomie Weniger Verschleiß

13
Neutrale Zone = Zone der physiologischen intervertebralen Bewegung, … unter minimalen internem Widerstand

14
Neutrale Zone Strukturelle „Verletzung“ führt zur Vergrößerung der neutralen Zone Störung liegt am Anfang der Bewegung (vgl. Instabilität) Lokale Muskeln kontrollieren die neutrale Zone

15
Instabilität Nach Panjabi 1992
„ … einer signifikanten Abnahme in der Möglichkeit des stabilisierenden Systems der Wirbelsäule, die neutrale Zonen der Bewegungssegmente in ihrem physiologischen Bereichen zu halten, sodass es zu keiner neurologischen Dysfunktion, keiner größeren Deformation und keinen behindernden Schmerzen kommt.“

16
Die Funktion eines Muskels ist von seiner Lage abhängig!

17
lokale globale Segmentale Stabilität Globale Stabilität Gleichgewicht
mehrgelenkige eingelenkige Strukturen lokale globale Segmentale Stabilität Globale Stabilität Gleichgewicht Bremsfunktion Bewegung

18
Globale Muskeln Lang Oberflächlich
Faserbündelrichtung quer zur Rumpf-bewegungsachse

19
Globale mehrgelenkige Muskeln
Zur Beschleunigung / Drehmoment-generierung werden immer oberflächliche Muskeln verwendet Ökonomisch –langer Hebel Viele Typ II Fasern Global movers

20
Globale, eingelenkige Muskeln
Bewegung verlangsamen Aufrichtung Gleichgewicht Global stabilizers

21
Lokale Muskeln Tief, klein, gelenknah, eingelenkig
Faserrichtung parallel zur Rumpfbewegungsachse Viele Typ I Fasern (aerob, ausdauernd) Viele Muskelspindeln
 Viele Muskelspindeln.")
22
Kokontraktion

23
Kokontraktion Ist bei Bewegungen immer vorhanden Variabel
Globale Kokontraktion Lokale Kokontraktion

24
Lokale Kokontraktion Lokale Dysfunktion
= Flexibilität + Gelenksstabilität Schränkt die neutrale Zone ein ohne erheblichen Verlust von Bewegungseffizienz Bei jeder Bewegung und Belastung Unabhängig von Richtung Lokale Dysfunktion Koordinationsstörung Wahrnehmungs -störung Kein Kraftverlust

25
Globale Kokontraktion
= Schutz durch Rigidität Auf Kosten der Bewegungseffizienz Bei Unsicherheit,axialer Belastung und akuten Schmerzen Richtungsspezifisch Keine Leistung für segmentale Stabilität – auch mit maximalem Krafteinsatz

26
Kokontraktion Phasische Aktivität – in Phase mit der Bewegung
Tonische Aktivität – unabhängig von der Bewegungsphase

27
Feed forward

28
Feed forward Vorprogrammierung Wegen elektro-mechanischer Verzögerung
Timing Intensität Wegen elektro-mechanischer Verzögerung min. 80 ms zwischen Innervierung und motorischer Antwort

29
Feed forward Bereitet den Körper auf interne und externe Störungen des Gleichgewichtes vor V.a. bei schellen Bewegungen

30
Feed forward Gleichgewicht ist richtungsspezifisch
Das Gehirn braucht die Information Störung kommt Störung kommt aus bestimmter Richtung Tiefes System braucht nur Information, dass etwas kommt

31
Kinästhesie

32
Kinästhesie Wahrnehmung der Körperhaltung und Bewegung
Erfolgt v.a. durch den Muskel Bei Ermüdung und Schmerz leidet die Kinästhesie

33
Sensomotorik

34
Funktionelle Stabilität Aktiv Muskeln Strukturelle Stabilität Passiv
Kontrolle Nervensystem Funktionelle Stabilität Aktiv Muskeln Strukturelle Stabilität Passiv Knochen/Band

35
Sensomotorik Nicht zu lange trainieren (20 – 30 Sekunden)
„ ... Dem Hirn wird fad ...“ Mehr Konzentration als Bewegung

36
Praxis

37
Bauchatmung Langsam durch die Nase einatmen ->Bauch hebt sich, 3Sek. Pause Durch den Mund ausatmen ->Bauch senkt sich, 3 Sek. Pause Wichtig: Brustkorb und Rippen bewegen nicht mit

38
BECKENKIPPEN Das Becken wie eine „Wippe“ zurück / vor bewegen
Das Becken abwechselnd rechts /links „lang“ machen (Beine sind aufgestellt) Zuerst die Bewegung 2-3x LANGSAM und groß beginnen, dann immer kleiner und schneller (~ 1/Sek.) Wichtig: Brustkorb und Beine bewegen nicht mit!
 Zuerst die Bewegung 2-3x LANGSAM und groß beginnen, dann immer kleiner und schneller (~ 1/Sek.) Wichtig: Brustkorb und Beine bewegen nicht mit!")
39
Rumpfstabilisation im Stehen
Koordination / Gleichgewicht: Ausgangsstellung: aufrechter Stand, beide Knie gestreckt. Abwechselnd das rechte / linke Bein heben bis 90° Hüft-u.Kniebeugung („Bein auf`s Stockerl stellen“) Diagonal mit der Hand gegen den Oberschenkel drücken Achtung: Das Standbein bleibt gestreckt (Knie)! Oberkörper bleibt aufrecht (Rumpfspannung)! Gesäß anspannen!
 Diagonal mit der Hand gegen den Oberschenkel drücken. Achtung: Das Standbein bleibt gestreckt (Knie)! Oberkörper bleibt aufrecht (Rumpfspannung)! Gesäß anspannen!")
40
Stabilität Knie und Sprunggelenk
Das Knie (Standbein) ist leicht gebeugt, der Oberkörper leicht vorgeneigt. Bewegen Sie das andere Bein vor / zurück rechts / links (hinter das Standbein) Achtung: KEINE Bewegung im Standbein!!! Knie und Sprunggelenk nach außen spannen!
 ist leicht gebeugt, der Oberkörper leicht vorgeneigt. Bewegen Sie das andere Bein. vor / zurück. rechts / links (hinter das Standbein) Achtung: KEINE Bewegung im Standbein!!! Knie und Sprunggelenk nach außen spannen!")
42
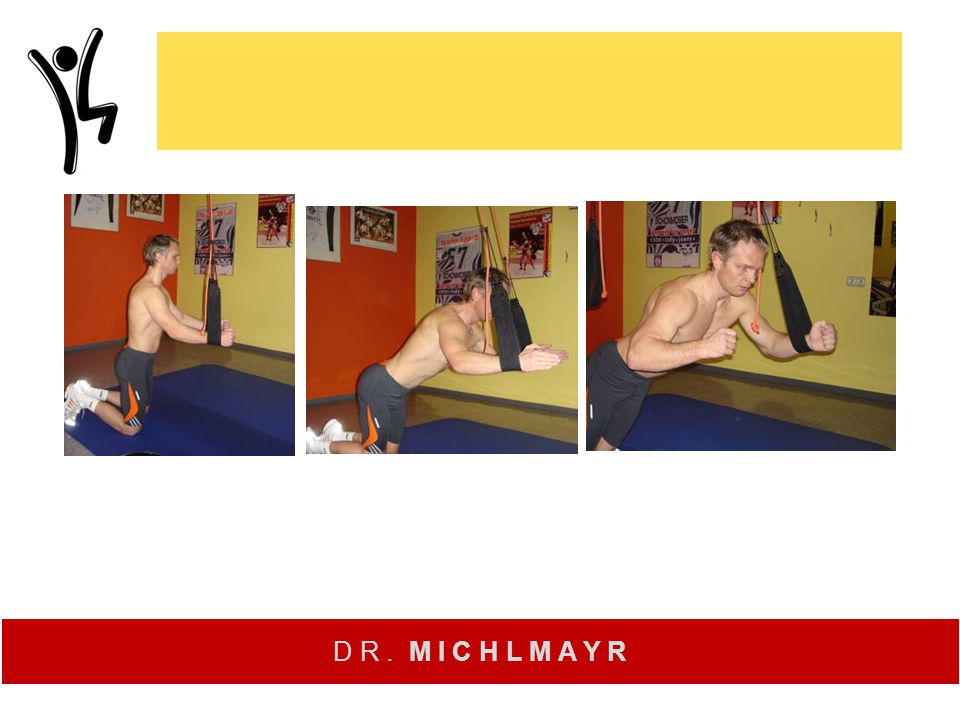
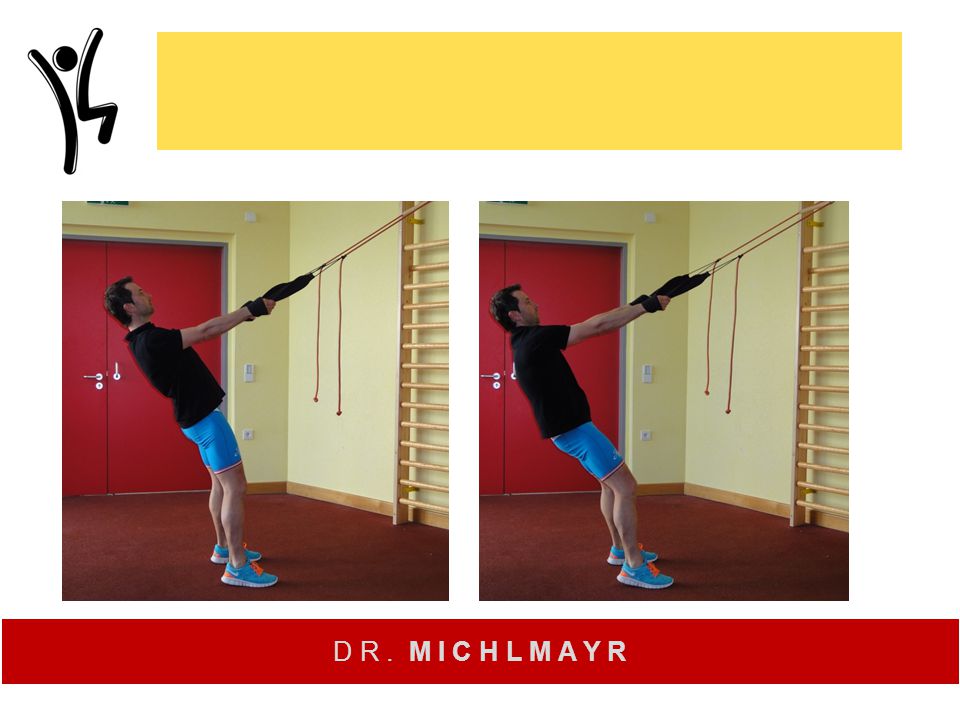
Ausgangsposition Lordose in Normalstellung (nie verhindern) Nabel leicht einziehen (nach oben, Lordose bleibt) Beckenboden leicht anspannen Rückenmuskeln meist automatisch aktiviert Positionierung Schlaufen: In Aufrechter Position, Druck in die Schlaufen bringen Unterarme od. Hände (kurzer/langer Hebel)
")
47
Gewöhnung & untere Extremität + Rumpf
stehen bzw. gehen auf 2 Slacklines Gewichtsübergabe von einem Bein zum anderen Die auftretenden Kräfte, welche auf den Slackliner wirken, sind seine eigene Gewichtskraft und die Reaktionskräfte der Slackline, die zwischen den Fußsohlen und der Slackline auftreten (Riexinger 2007). Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse geht durch die Auflagefläche zwischen Fuß und Slackline
. Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse. geht durch die Auflagefläche zwischen Fuß und Slackline.")
48
Kniestart Kniestart und im Einbeinstand bleiben (mehrere Sekunden)
Gewöhnung & untere Extremität + Rumpf Kniestart Kniestart und im Einbeinstand bleiben (mehrere Sekunden) Schritt nach vorne im Einbeinstand bleiben (mehrere Sekunden) Die auftretenden Kräfte, welche auf den Slackliner wirken, sind seine eigene Gewichtskraft und die Reaktionskräfte der Slackline, die zwischen den Fußsohlen und der Slackline auftreten (Riexinger 2007). Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse geht durch die Auflagefläche zwischen Fuß und Slackline
 Schritt nach vorne. im Einbeinstand bleiben (mehrere Sekunden) Die auftretenden Kräfte, welche auf den Slackliner wirken, sind seine eigene Gewichtskraft und die Reaktionskräfte der Slackline, die zwischen den Fußsohlen und der. Slackline auftreten (Riexinger 2007). Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse. geht durch die Auflagefläche zwischen Fuß und Slackline.")
49
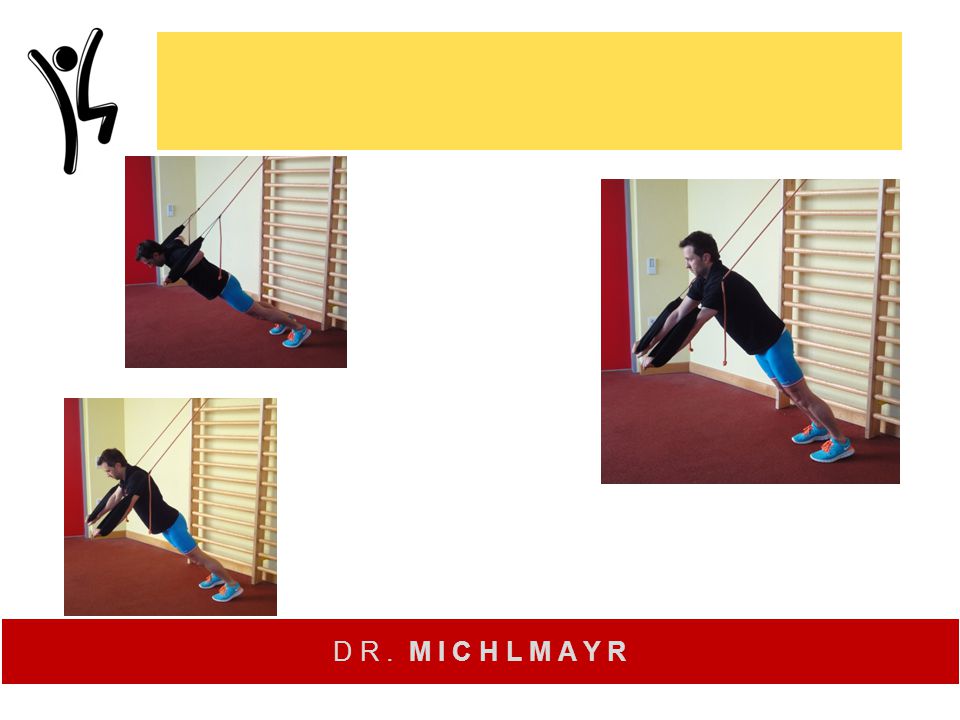
2. Stützposition mit Akzent auf den oberen Rumpfabschnitt
Seitstütz auf Slackboard Sitzposition (Rumpfaktivität!) Die auftretenden Kräfte, welche auf den Slackliner wirken, sind seine eigene Gewichtskraft und die Reaktionskräfte der Slackline, die zwischen den Fußsohlen und der Slackline auftreten (Riexinger 2007). Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse geht durch die Auflagefläche zwischen Fuß und Slackline
 Die auftretenden Kräfte, welche auf den Slackliner wirken, sind seine eigene Gewichtskraft und die Reaktionskräfte der Slackline, die zwischen den Fußsohlen und der. Slackline auftreten (Riexinger 2007). Dabei kann man annäherungsweise von einem System mit zwei Drehachsen ausgehen. Die erste Drehachse. geht durch die Auflagefläche zwischen Fuß und Slackline.")
50
Bezugsquelle Sling Trainer Slack Base Bruggerstraße 34 A-6973 Höchst
Auenbrugger Gasse 2/11, A Wien Tel.: +43 (0) , Fax: +43 (0) Slack Base Bruggerstraße 34 A-6973 Höchst Telefon & Fax: T +43 (0) F +43 (0)
 , Fax: +43 (0) Slack Base. Bruggerstraße 34. A-6973 Höchst. Telefon & Fax: T +43 (0) F +43 (0)")
52
Danke für Ihre Aufmerksamkeit!

Ähnliche Präsentationen






















 Der rechte Arm des Walkers wird in der Anfangsphase leicht gebeugt. Die linke Faust ist auf Höhe des Beckens positioniert, und während.>")