Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Stochastische Prozesse I
Seminarvortrag von Elias Kellner Zeitreihen Modellierung Analyse Beispiel: Kalmanfilter

2
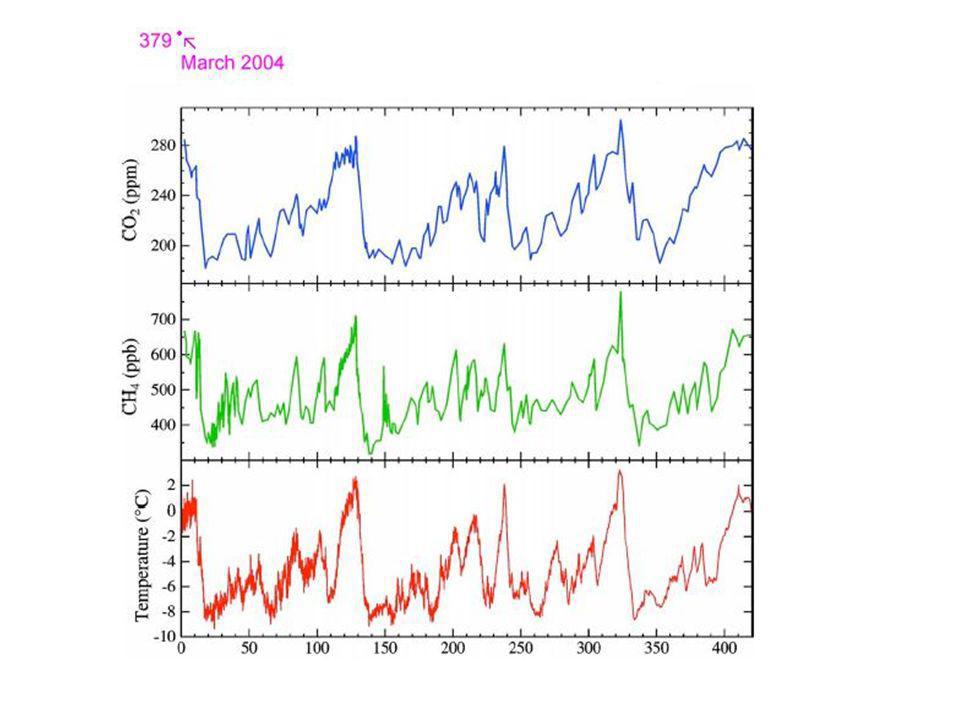
1. Zeitreihen Zeitreihe: zeitabhängige Folge von Datenpunkten
i.d.R. nicht stochastisch unabhängig

4
Handschriftanalyse, Zeitreihe der vertikalen Geschwindigkeit

5
Zeitreihe (Daten) Trendkomponenten Saisonale Komponenten Modellbildung Vorhersage (Simulation) Tiefere Einsichten

6
Wir brauchen: Geeignete Werkzeuge zur Datenenanalyse Fitfunktionen zur Trendbereinigung Spektralanalyse Korrelationsanalyse mathematische Beschreibung zur Modellbildung

7
Stochastischer Prozess „Rauschen“
Betrachte zeitdiskrete Prozesse, um Rauschen zu simulieren 2 Klassen dynamischer Systeme -nichtvergeßliche (klassische) -vergeßliche (stochastische) (chaotische)
 -vergeßliche. (stochastische) (chaotische)")
8
Stationarität Prozess ( Verteilungen bekannt) Realisation
Eine Zeitreihe heißt stark stationär, wenn die Verteilung von nicht vom Index abhängt. Eine Zeitreihe heißt schwach stationär, wenn 1. 2. Autokovarianz

9
Für ergodische Systeme gilt: „Scharmittel = Zeitmittel“
Ergodizität Ergodisch in klass. Mechanik: System kommt erlaubten Systemzuständen beliebig nahe Jeder Prozess induziert eine Dichte im Phasenraum. Mittelwerte müssen bezüglich dieser Dichte gebildet werden Für ergodische Systeme gilt: „Scharmittel = Zeitmittel“

10
Simulation des Rauschens:
Summe von vielen stochastischen Einflüssen Zentraler GWS Rauschen gaußverteilt Weißes Rauschen (WN): Folge von unabhängigen Realisationen einer gaußverteilten Zufallsvariablen
: Folge von unabhängigen Realisationen einer gaußverteilten Zufallsvariablen.")
11
Modellierung durch AR-Prozesse
Betrachte „vergesslichen“ Prozess Nehme an, xt sei linear durch die N vorherigen Datenpunkte bestimmt (Autoregession) Addiere zu jeden xt eine kleine Störung (Zufallsvariable, z.B. weisses Rauschen) AR(N) – Prozess:
 Addiere zu jeden xt eine kleine Störung (Zufallsvariable, z.B. weisses Rauschen) AR(N) – Prozess:")
13
Differenzengleichungen.
Differenzengleichung = „diskretisierte“ Differentialgleichung Ansatz macht Sinn, da Natur i.a. durch Differentialgleichungen beschrieben wird. lineare DGL n‘ter Ordnung Rückführung von DGL n‘ter Ordnung auf System von DGL 1‘ter Ordnung z.B harmonischer Oszillator:

14
Analog läßt sich jeder univariate AR(N)-Prozess auf
einen n-variaten AR(1) Prozess reduzieren.
 Prozess reduzieren.")
15
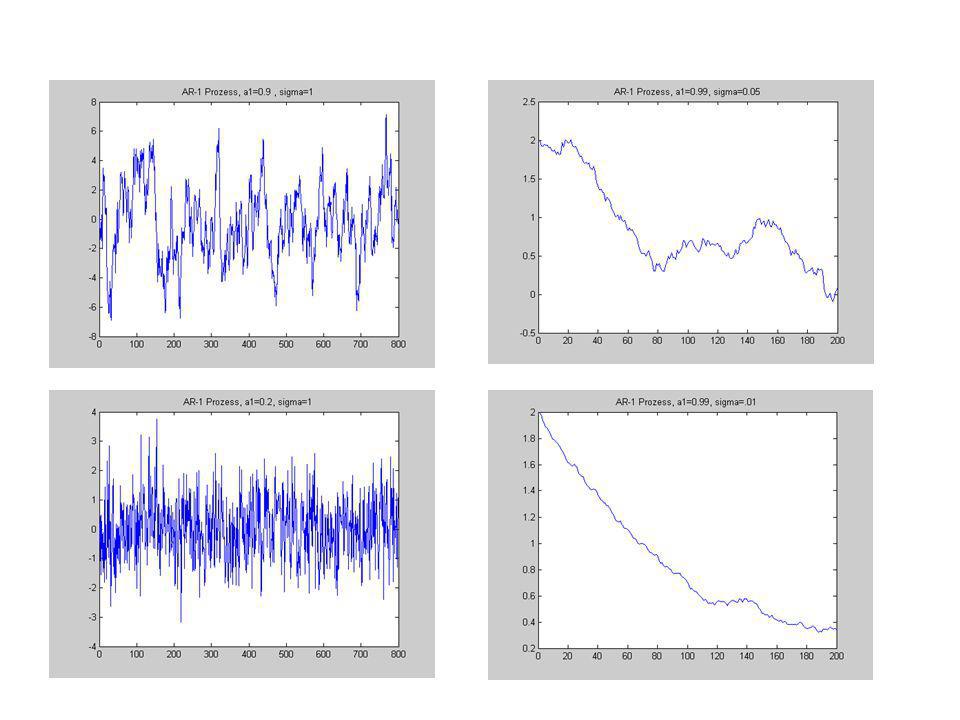
Eigenschaften eines AR(1) Prozesses
zentriert stationär ergodisch a<1 Varianz:

16
a=1 Random Walk (Brownian Motion)
")
17
AR(N) – Prozess: MA(N) – Prozess: (gleitendes Mittel) ARMA(p,q)
 – Prozess: MA(N) – Prozess: (gleitendes Mittel) ARMA(p,q)")
18
Spektralanaylse Gegeben sei eine Zeitreihe. Welche Frequenzen sind enthalten? Fouriertrafo (ohne Normierung) Unterscheide wie immer FT einer Realisation und eines Prozesses FT ist komplexe Größe

19
Aliasing Vor dem sampeln muss gefiltert werden!!
Zeitreihe = gesampelter, kontinuierlicher Prozess! Sample z.B. einen Sinus mit Samplingfrequenz f Vor dem sampeln muss gefiltert werden!!

20
Spektrum Definiere Spektrum
ACF einer Zeitreihe entspricht einer Faltung der Reihe mit sich selbst Faltung im Ortsraum enspricht Multiplikation im Frequenzraum. Multiplikation mit sich selbst ist | |2 Definition über ACF mathematisch korrekt, aber über FT leichter zu schätzen!

21
Schätzung des Spektrums: 2 Probleme
1. Spektrum als Erwartungswert definiert. Meist aber nur eine Zeitreihe vorhanden! Suche Schätzer für Spektrum z.B Periodogramm: Problem: Periodogramm „zappelt“ mit Chi2 - Verteilung Var(Per) ist unabhängig von N nicht konsistent
 ist unabhängig von N nicht konsistent.")
22
2. Problem: Endliche Zeitreihe = unendliche Reihe mit Fenster multipliziert
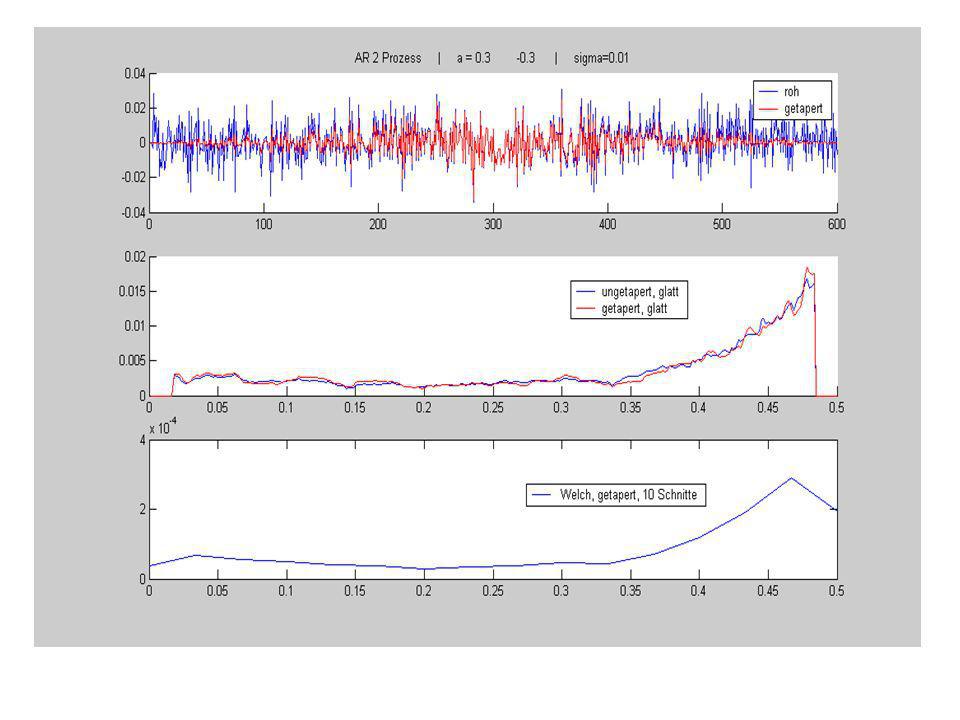
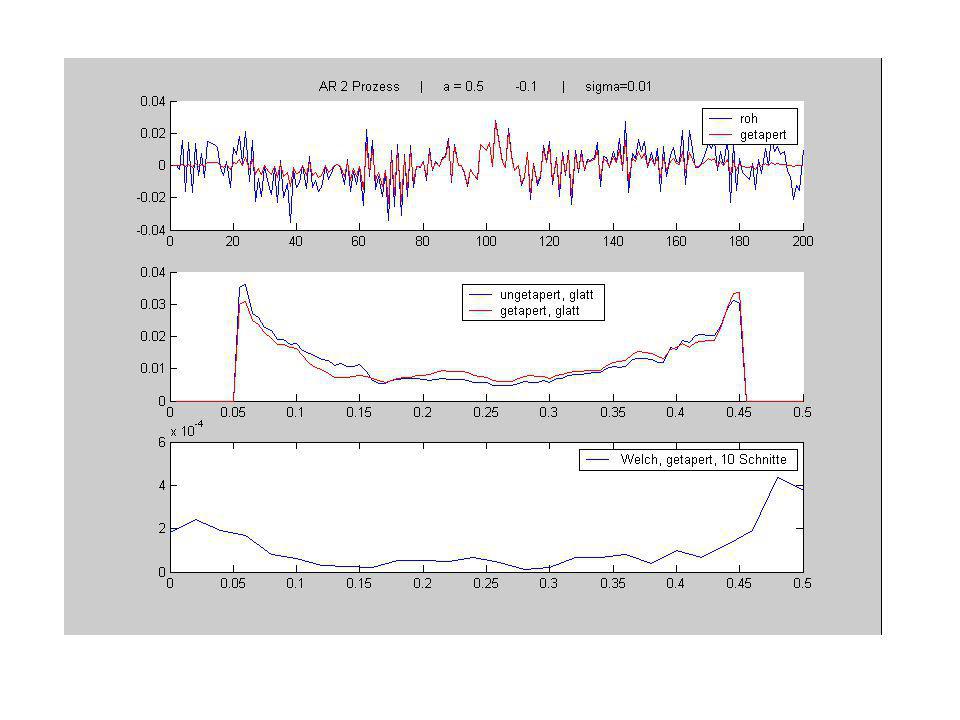
Im Frequenzraum zusätzlich Faltung mit dem Sinc des Fensters! leaking Power von Peaks in Täler Periodogramm ist sogar verzerrter Schätzer Lösung: „Tapering“: kein eckiges Rechteckfenster, sondern Dreick- oder Gaussfenster optimalstes Fenster : Hamming

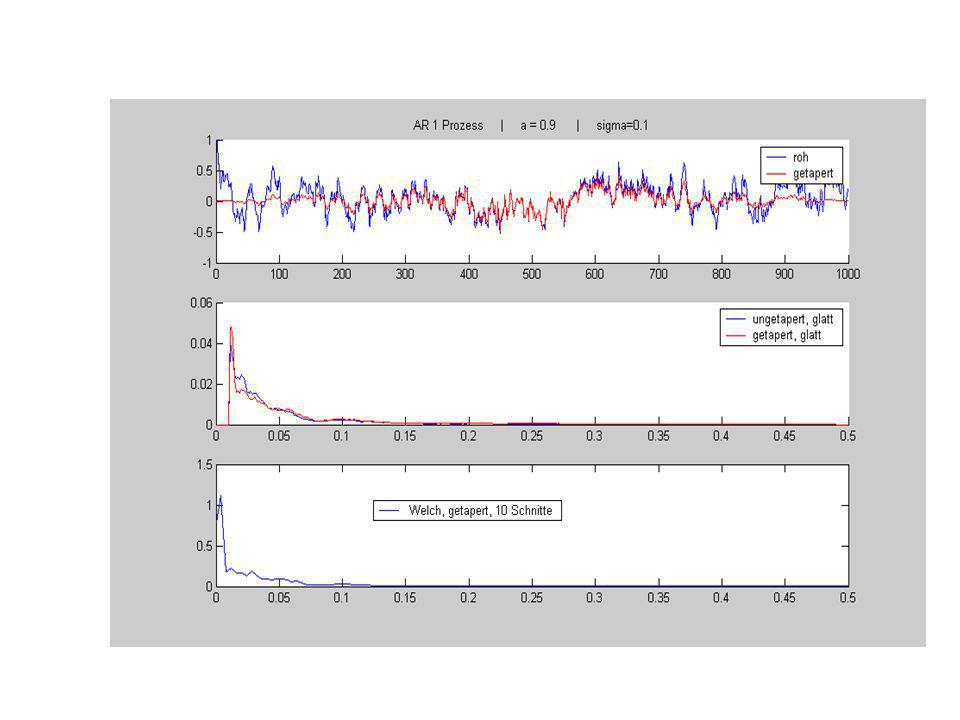
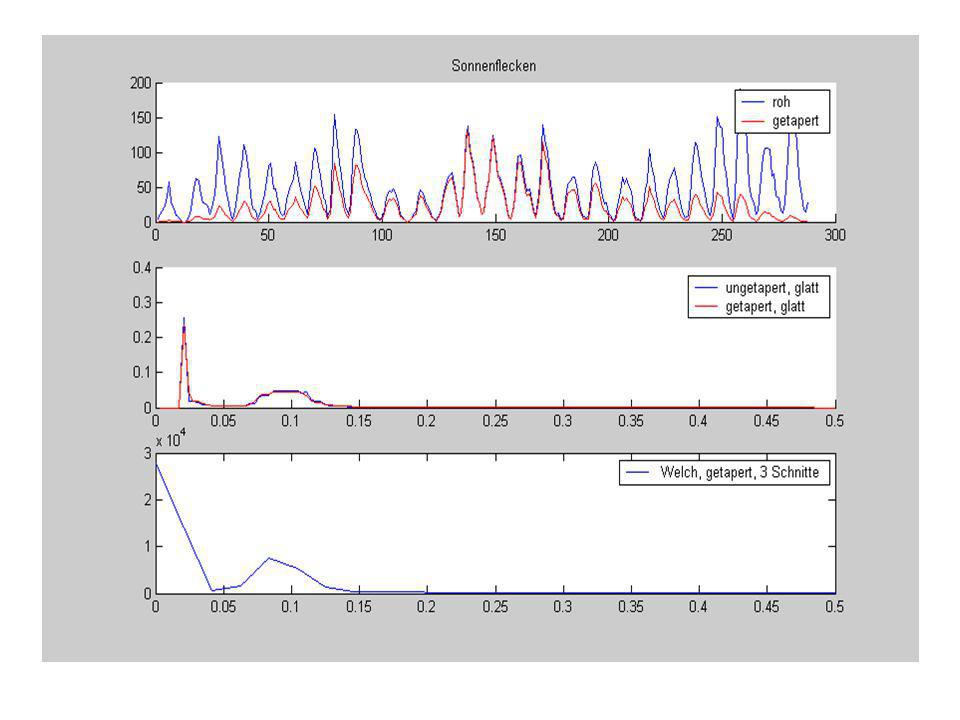
23
Frequenzweise mitteln
Schätzung des Spektrums durch Zerschneiden der Zeitreihe, Tapern Und Mittelwertbildung der einzelnen Periodogramme Methode nach Welch Zeitreihe Zerschneiden Tapern |FFT|2 Frequenzweise mitteln

31
Wichtige Filterklasse: linear und zeitinvariant (LTI-Filter)
Filter allgemein: X(t) Filter y(t) Wichtige Filterklasse: linear und zeitinvariant (LTI-Filter) Filtersystem ist durch seine Impulsantwort bestimmt (FIR, IIR ) MA – Prozess ohne Rauschen = FIR Filter ARMA – Prozess ohne Rauschen = IIR Filter X-Pass-Filter, Bildbearbeitung…
 Filter. y(t) Wichtige Filterklasse: linear und zeitinvariant (LTI-Filter) Filtersystem ist durch seine Impulsantwort bestimmt (FIR, IIR ) MA – Prozess ohne Rauschen = FIR Filter. ARMA – Prozess ohne Rauschen = IIR Filter. X-Pass-Filter, Bildbearbeitung…")
32
Das Kálmán-Filter Systemgleichung Beobachtungsgleichung
Gegeben Sei dynamisches System, z.B. ein multivariater AR(1) Prozess Systemgleichung Beobachtungsgleichung Wir haben nur Zugriff auf yt ! Gesucht: Filter, das uns die wahren Werte xt schätzt y(t) Filter x(t)
 Prozess. Systemgleichung. Beobachtungsgleichung. Wir haben nur Zugriff auf yt ! Gesucht: Filter, das uns die wahren Werte xt schätzt. y(t) Filter. x(t)")
33
Beobachtungsgleichung
Systemgleichung Beobachtungsgleichung Einfache Schätzung: Rückrechnen auf xt durch B-1 Große Fehler wegen Beobachtungsrauschen Man kann ausnutzen, dass man die Dynamik A des Systems kennt 1. Prädiktionsschritt: Beobachte y(t), berechne daraus Fehler y(t|t-1) - y(t) 2. Korrektur
, berechne daraus Fehler y(t|t-1) - y(t) 2. Korrektur.")
34
Bsp: Kalman Filter, AR-1 Prozess a=0.89, Beobachtug stark verrauscht

35
Zusammenfassung AR-Prozesse Spektrum
Spektrum schätzen: Schneiden - Tapern – Periodogramme mitteln

Ähnliche Präsentationen







>")














