Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Der Tastsinn - haptische MCI
Multimedia und Virtual Reality Vorlesung am Martin Kurze Der Tastsinn - haptische MCI

2
Der Tastsinn - Sinn ohne Organ
Sehsinn - Auge Hörsinn (Gehör) - Ohr Geschmackssinn - Zunge Riechsinn - Nase Tasten - gesamter Körper ?
 - Ohr. Geschmackssinn - Zunge. Riechsinn - Nase. Tasten - gesamter Körper")
3
Die Haut - ein wichtiges Tastorgan
Und wie tastet man nun?

4
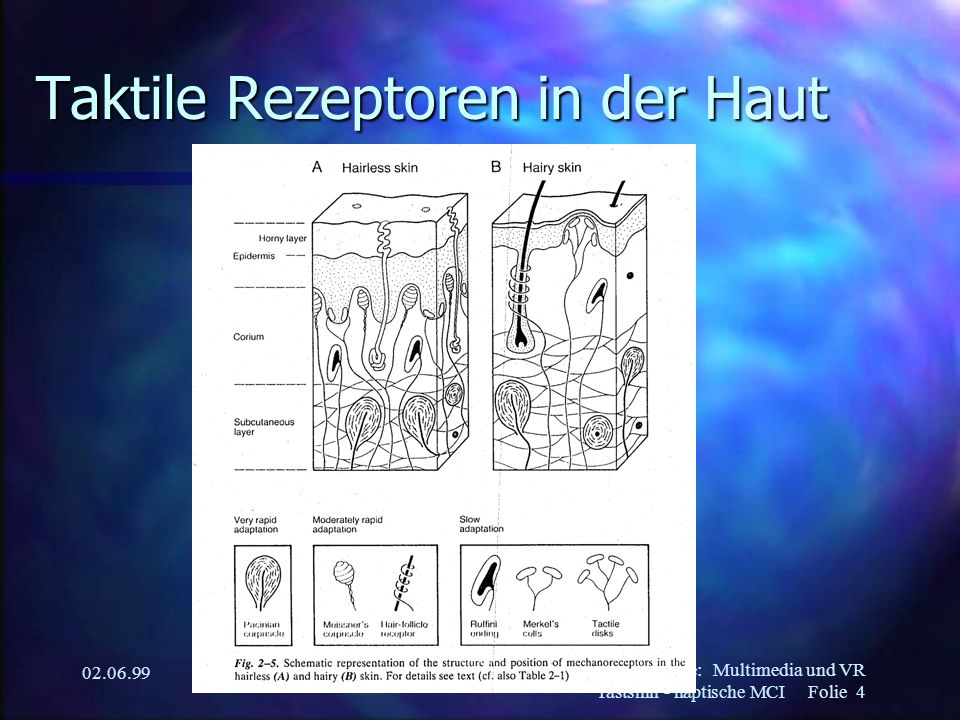
Taktile Rezeptoren in der Haut
5
Propriozeption Wahrnehmung des eigenen Körpers Knochen Muskeln Nerven
Innereien

6
Tastwahrnehmung taktile Wahrnehmnung - über die Haut kinästhetische Wahrnehmung - über Muskeln und Gelenke Propriozeption - über Sensoren im Körperinneren Haptische Wahrnehmung - taktil + kinästhetisch + propriozeptiv

7
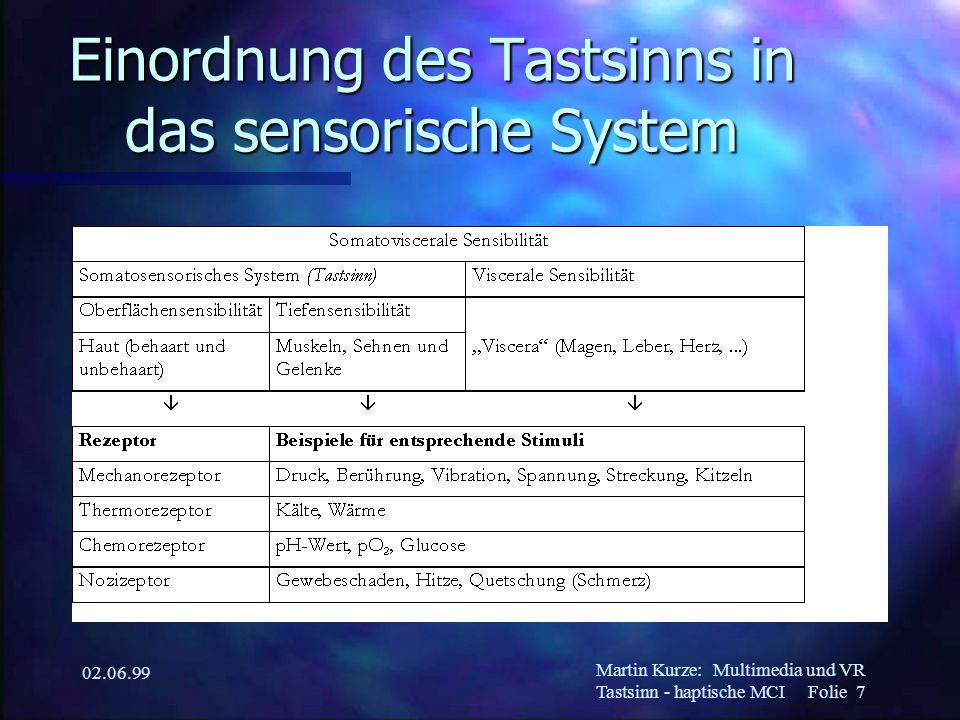
Einordnung des Tastsinns in das sensorische System
8
Reiztypen räumliche Auflösung (Finger/Hand)
2 bis 12 mm bei gleichzeitigem Reiz 1 bis 4 mm bei sukzessiven Reizen räumliche Auflösung (Rücken) 50 bis 100 mm „Einstülpung“ - an den Fingerspitzen 6 mm Vibrationen - bis 1 mm
 50 bis 100 mm. „Einstülpung - an den Fingerspitzen 6 mm. Vibrationen - bis 1 mm")
9
Die „taktile Lupe“ Ein Stück Stoff an den Fingerspitzen ermöglicht das Ertasten sehr feiner Unebenheiten/Strukturen [Lederman 78]. Ursachen sind möglicherweise Resonanz und parallele Stimulation verschiedener Rezeptoren gleichzeitig.
![Die „taktile Lupe Ein Stück Stoff an den Fingerspitzen ermöglicht das Ertasten sehr feiner Unebenheiten/Strukturen [Lederman 78].](http://slideplayer.org/slide/636352/1/images/9/Die+%E2%80%9Etaktile+Lupe+Ein+St%C3%BCck+Stoff+an+den+Fingerspitzen+erm%C3%B6glicht+das+Ertasten+sehr+feiner+Unebenheiten%2FStrukturen+%5BLederman+78%5D..jpg "Ursachen sind möglicherweise Resonanz und parallele Stimulation verschiedener Rezeptoren gleichzeitig")
10
Rezeptortypen Pacini-Körperchen Meißner-Körperchen Merkel-Zellen usw.
schnelle Adaption, melden Vibration und Beschleunigung Meißner-Körperchen langsame Adaption, melden Änderungen Merkel-Zellen usw. sehr langsame Adaption zur Bestimmung von Intensität und Dauer des Reizes

11
Direkte elektrische Reizung ??
Leitfähigkeit der Haut individuell unterschiedlich Empflidliche Regionen liegen neben unempfindlichen Elektrische Reizung erzeugt nur „Kribbeln“, nie Druckempfindung o.ä. Adation der Rezeptoren erfordert wachsende Ströme ... „vagabundierende Ströme“

12
passives und aktives Tasten
passives Tasten nur mit der Haut (Gegenstand bewegt sich) aktives Tasten mit Haut und Muskeln (Hand bewegt sich) aktives Tasten deutlich leistungsfähiger!
 aktives Tasten mit Haut und Muskeln (Hand bewegt sich) aktives Tasten deutlich leistungsfähiger!")
13
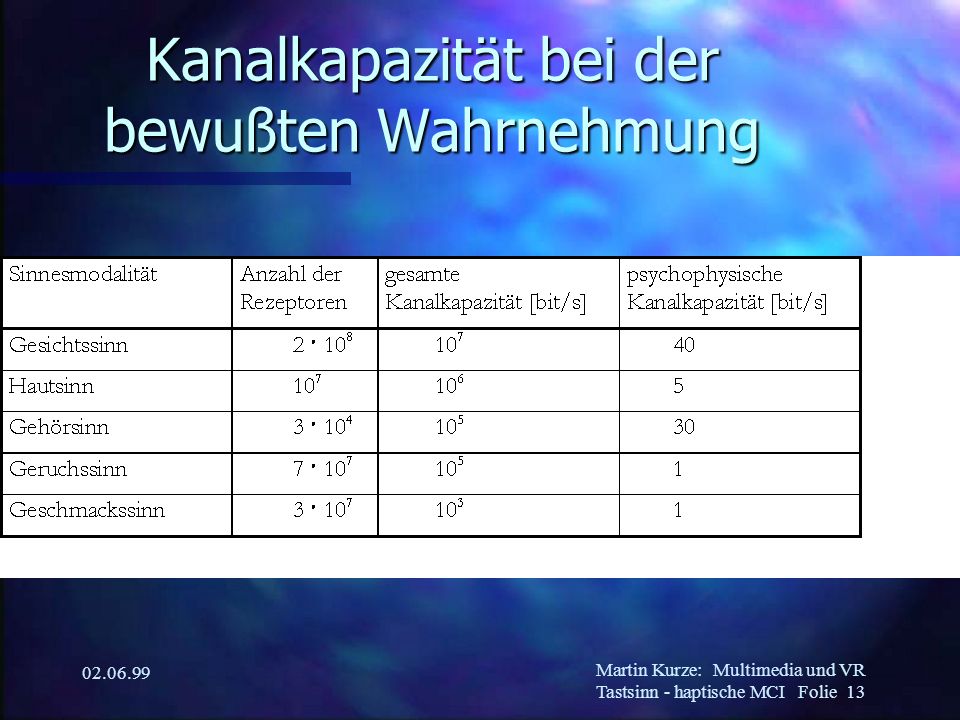
Kanalkapazität bei der bewußten Wahrnehmung
14
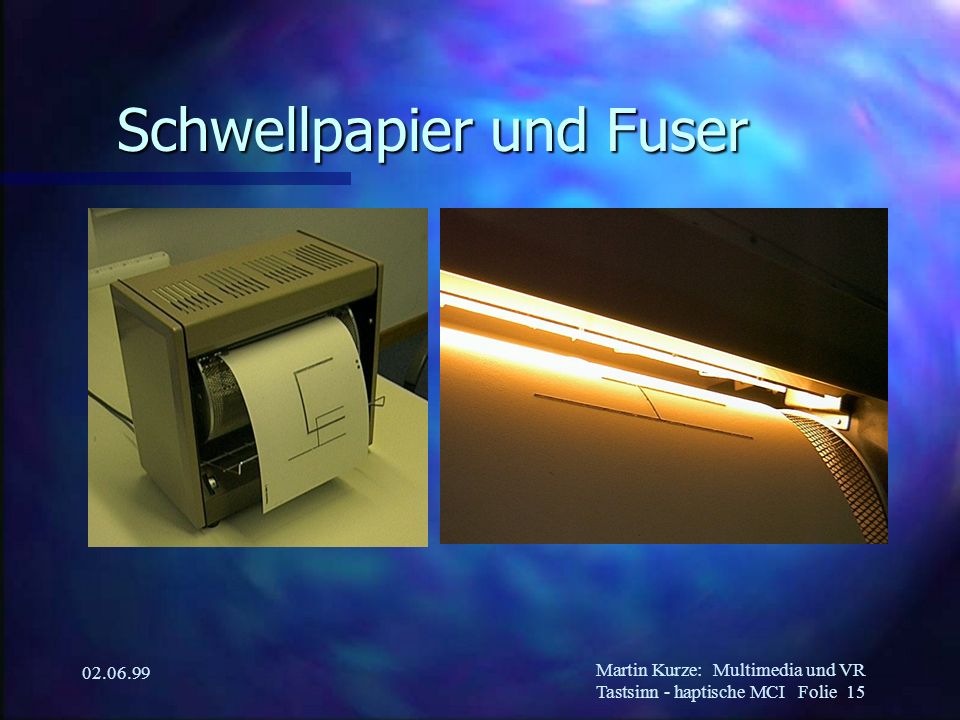
Geräte und Techniken räumliche Festkörpermodelle (z.B. mit Stereolithographie hergestellt) nicht-flüchtige flächige Darstellung Stickerei, ggf. computergesteuert Tiefziehfolien Riffelfolie Schwellpapier

15
Schwellpapier und Fuser
16
dynamische taktile Anzeigen
stiftbasiert Metec Shinohara

17
dynamische taktile Anzeigen (2)
Braille- Display

18
dynamische taktile Anzeigen (3)
kinästhetische Anzeigen Phantom

19
dynamische taktile Anzeigen (4)
kinästhetische Anzeigen Pantograph Force-Feedback Joystick

20
Soziale Aspekte (gefühlsbetont)
Haptische Kommunikation Tasten ist immer auch getastet werden!

21
Bedeutung haptischer Medien
für Blinde für Spieler für Ärzte für neue Telekommunikationsformen in Zukunft in virtuellen Umgebungen (?)
")
22
Übungsaufgaben zu PROTOs
PROTO Baum mit fields SFVec3f trunkSize und SFVec3f crownSize; verwenden Sie ihn in Ihrer Welt „Haus mit Baum“. PROTO Animator mit fields MFVec3f posKeyValues, MFRotation rotKeyValues und SFTime duration, SFTime startTime. Lassen Sie einen Würfel durch ihn animieren. Proto Rotor mit fields SFTime cycleTime für die Umlaufzeit, SFVec3f offset für den Abstand zur Rotationsachse und MFNode children für die zu rotierenden Gegenstände.

Ähnliche Präsentationen


















>")
