Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Objekt- und Selbstlokalisation in der Robotik
Arndt Mühlenfeld

2
Anfang soccerVision liefert Positionen im Bild.
Die Tore und das Hindernis mit Bounding-Box und Schwerpunkt. Auf den Ball wird ein Kreisfitting durchgeführt.

3
soccerVision

4
Mängel Kein Bestimmung der Ballposition im Spielfeld.
Khepera erkennt die Wand nicht als Hindernis. Keksi braucht Selbstlokalisation.

5
„goalieVision“ Segmenter Ballposition RGB-Image Match Model Linescan
Blob-selection + Circlefitting Segmenter Ballposition RGB-Image soccerVision Houghtransform + Line-selection Match Model Linescan Pose

6
Selbstlokalisation 1) Finden von potentiellen Linienpunkten
2) Hough-Transformation 3) Ermitteln der Maxima 4) Zählen der Punkte auf jeder Linie 5) Maxima wählen und ähnliche entfernen 6) Vergleich mit gegebenem Modell
 Hough-Transformation. 3) Ermitteln der Maxima. 4) Zählen der Punkte auf jeder Linie. 5) Maxima wählen und ähnliche entfernen. 6) Vergleich mit gegebenem Modell.")
7
Line-scan

8
Kamera-Kalibrierung Linsen-Verzerrung (k1 k2 p1 p2) Kamera-Matrix
 Kamera-Matrix")
9
OpenCV Funktionen in OpenCV: Aber: cvFindChessBoardCornerGuesses
cvCalibrateCamera Aber: Punkte im Bild müssen den Punkten im „Schachbrett“ zugeordnet werden.

10
FindChessBoardCornerGuesses

11
Die Houghtransformation für Geraden
bzw.

12
Linien im Bild

13
Umrechung in die Boden-Ebene
Ebenengleichung: y z Blickrichtung Kalibriert in mm B Höhe Roboter x X0 A

14
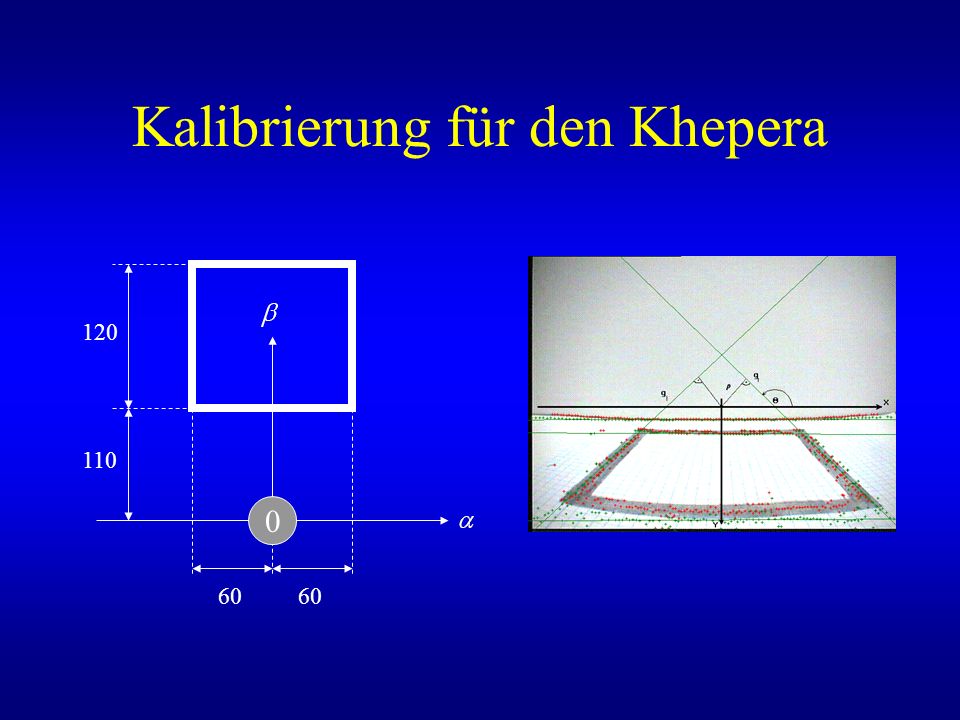
Kalibrierung für den Khepera
120 110 60 60
15
Das Modell vom Test-Goalie (Keksi II)
Hough-Space v 600 h Tor

16
Probleme Mehrdeutigkeiten in der Position:

17
Ballposition 2 Möglichkeiten:
Berechnung der Projektion des Mittelpunkts auf den Boden, über die Ballhöhe kommt man auf die tatsächliche Position. Ermitteln der Parameter der Ebene parallel zum Boden durch die Ballmitte. Problem: Das Ballzentrum im Bild ist sehr ungenau.

18
Ballgeschwindigkeit Einfache Differenzbildung zwischen zwei Bildern funktioniert nicht gut. Kalman-Filter: Modell: Messung:

19
Anwendung Ableiten des Controllers von visionControllerBase. Überschreiben der virtuellen Methoden: setBallPosition (timestamp, x, y) setPose (timestamp, x, y, phi) Erzeugen eines goalieVision - Objekts, Übergabe des Controller-Objekts. Aufruf der Methode goalieVision::Run()
 setPose (timestamp, x, y, phi) Erzeugen eines goalieVision - Objekts, Übergabe des Controller-Objekts. Aufruf der Methode goalieVision::Run()")
20
(Eine detailliertere Beschreibung mit Referenzen ist in Arbeit)
Ende (Eine detailliertere Beschreibung mit Referenzen ist in Arbeit)
")
Ähnliche Präsentationen








 Funktion f aus den (bekannten) Funktionen h und g. Bezeichnung h(x) … Messdaten f(y) … Physikalisches Profil.>")


: auf Flugzeugen oder auf Satelliten.>")







