Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Bewegte Bezugssysteme
Annette Eicker

2
Wiederholung: Energie bei der Keplerbahn
Bewegungsgleichung mit der Gravitationskraft Aus einer Potentialfunktion mit Gravitations- potential Energieerhaltung Potentielle Energie Die Bahnenergie bleibt erhalten Die Gesamtenergie hängt nur von der großen Halbachse ab

3
Fluchtgeschwindigkeit
Bahnenergie 2. kosmische Geschwindigkgeit 1. kosmische Geschwindigkgeit Einflussbereich der Erde verlassen Daraus folgt für die Bahnenergie Fluchtgeschwindigkeit Fluchtgeschwindigkeit von der Erdoberfläche (R=6378km) (2. kosmische Geschwindigkgeit) Fluchtgeschwindigkeit aus dem Sonnensystem von der Erdoberfläche aus (3. kosmische Geschwindigkgeit)
 (2. kosmische Geschwindigkgeit) Fluchtgeschwindigkeit aus dem Sonnensystem von der Erdoberfläche aus. (3. kosmische Geschwindigkgeit)")
4
Wiederholung: Satellitenparadoxon
Bahnenergie Änderung der Geschwindigkeit Erhöhung der Geschwindigkeit führt zu Vergrößerung der Halbachse. Umlaufzeit Satellitenparadoxon: Eine Erhöhung der Geschwindigkeit führt zu einer größeren Umlaufzeit.

5
Wiederholung: Bahnenergie CHAMP
Verlauf der Bahnenergie Energieverlust durch Atmossphärenreibung m²/s² Die abgeplattete Erde Stunden

6
Wiederholung: Bahnenergie CHAMP
Verlauf der Bahnenergie reduziert um Trend und periodischen Anteil (2 Zyklen pro Umlauf) m²/s² Stunden
 m²/s². Stunden")
7
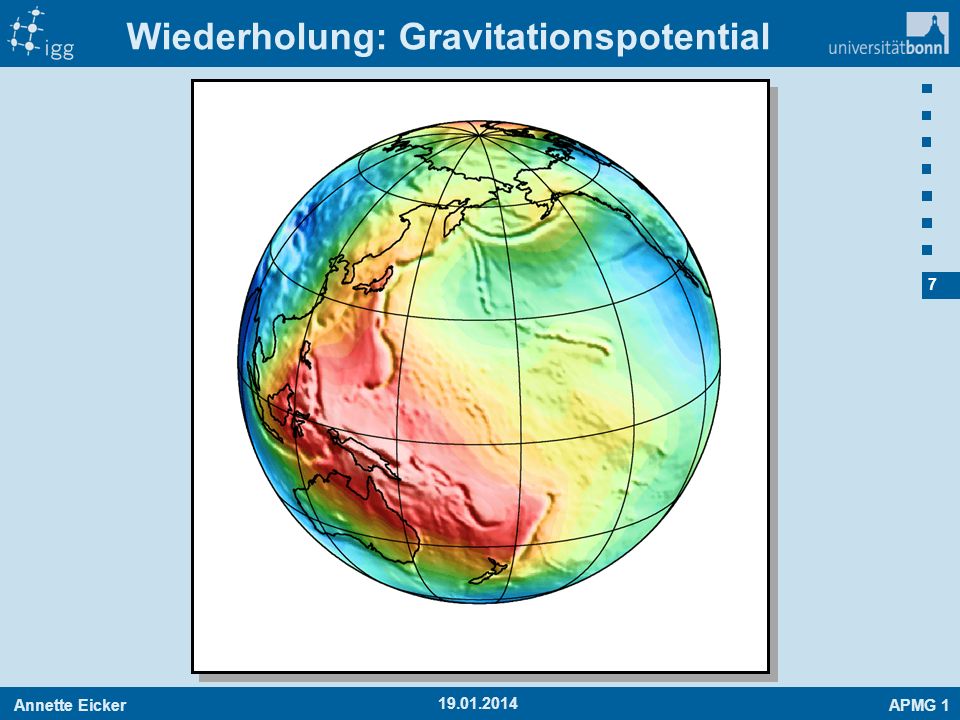
Wiederholung: Gravitationspotential
8
Bewegte Bezugssysteme
9
Ortsvektor und Koordinatensystem
10
Ortsvektor und Koordinatensystem
x R r

11
Position und Koordinatensystem
Bewegungsgleichung x r R Im System gilt die gleiche Bewegungsgleichung falls Vektoren sind koordinatenunabhängig! Gelten die Gleichungen auch für Koordinaten? => Gradlinig, gleichförmige Bewegung => Inertialsystem

12
Position und Koordinatensystem
Vektoren sind koordinatenunabhängig x

13
Position und Koordinatensystem
Koordinatenachsen B im System I x In Matrizenform mit D ist eine Drehmatrix (Beweis nächste Folie)
")
14
Drehmatrix In Matrizenform Transponiert

15
Position und Koordinatensystem
Vektoren sind koordinatenunabhängig x Transformation der Basisvektoren Transformation der Koordinaten

16
Position und Koordinatensystem
koordinatenunabhängig x Mit Koordinaten r R 1. Ableitung 2. Ableitung

17
Position und Koordinatensystem
Bewegungsgleichung x r R Es gilt die selbe Bewegungsgleichung wie im Intertialsystem!

18
Transformation Die Bewegungsgleichung (und alle anderen Newtonschen Axiome) ist invariant gegenüber der Galileo-Transformation: Transformation zwischen Systemen, die sich gradlinig gleichförmig bewegen und konstant gegeneinander verdreht sind (D = const). => Inertialsysteme.
. => Inertialsysteme")
19
Rotierende Bezugssysteme
20
Rotierendes Koordinatensystem
x Änderung der Koordinaten im System B (Geschwindigkeit im System B) Drehung des Koordinatensystems B
 Drehung des Koordinatensystems B")
21
Drehung aus der Sicht des Inertialsystems
Geschwindigkeit im System I x

22
Drehung aus der Sicht des Inertialsystems
Geschwindigkeit im System I x

23
Drehung aus der Sicht des Inertialsystems
Geschwindigkeit im System I x

24
Drehung aus der Sicht des Inertialsystems
Geschwindigkeit im System I x

25
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I Geschwindigkeit im System B x

26
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I Geschwindigkeit im System B x

27
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I Geschwindigkeit im System B x

28
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I Geschwindigkeit im System B x

29
Rotierendes Koordinatensystem
x Änderung der Koordinaten im System B (Geschwindigkeit im System B) Drehung des Koordinatensystems B Nächste Folie!
 Drehung des Koordinatensystems B. Nächste Folie!")
30
Ableitung der Basisvektoren
Gesucht: Drehmatrix Zeitliche Ableitung Änderung des Systems B => schiefsymmetrisch mit

31
Ableitung der Basisvektoren
Gesucht: Änderung des Systems B

32
Rotierendes Koordinatensystem
x Änderung der Koordinaten im System B (Geschwindigkeit im System B) Drehung des Koordinatensystems B
 Drehung des Koordinatensystems B")
33
Rotierendes Koordinatensystem
x Ableitung Rotation des Bezugssystems Bewegung im rotierenden System Gilt für alle Vektoren => Ableitungsoperator

34
Interpretation des Vektors d
Operator angewendet auf Dreibein Der Betrag des Vektors ändert sich nicht! Die Änderung eines konstanten Vektors kann nur eine Drehung bedeuten!

35
Interpretation des Vektors d
Operator angewendet auf Dreibein Vektorielles Differential steht senkrecht auf der von d und aufgespannten Ebene Winkeländerung Vektor d ist Vektor der Winkelgeschwin- digkeiten!

36
Rotierendes Koordinatensystem
x Ableitung Rotation des Bezugssystems Bewegung im rotierenden System Gilt für alle Vektoren => Ableitungsoperator

37
Bewegungsgleichung x Bewegungsgleichung r R

38
Ableitung Ableitungsoperator

39
Ableitung Ableitung des Drehvektors Ableitungsoperator in beiden
Systemen gleich

40
Bewegungsgleichung Bewegungsgleichung Inertialsystem r R bewegtes
x r R Bewegungsgleichung Inertialsystem bewegtes Bezugssystem

41
Bewegungsgleichung im bewegten System
Inertialsystem Bewegtes System x Zentrifugalkraft Kreiselkraft Corioliskraft r R

42
Corioliskraft

43
Corioliskraft

44
Corioliskraft

45
Corioliskraft

46
Corioliskraft

47
Corioliskraft

48
Corioliskraft

49
Corioliskraft

50
Corioliskraft

51
Corioliskraft

52
Corioliskraft

53
Corioliskraft

54
Corioliskraft

55
Corioliskraft

56
Corioliskraft

57
Corioliskraft

58
Corioliskraft

Ähnliche Präsentationen






 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")

Media Landesanstalt für Kommunikation Baden-Württemberg (LFK) Landeszentrale für Medien und Kommunikation.>")




>")


>")
>")
