Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Astronomisch, Physikalische und Mathematische Geodäsie II
Transformationen Vorlesung vom 18. Januar 2007 Astronomisch, Physikalische und Mathematische Geodäsie II Torsten Mayer-Gürr

2
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
3
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
4
Konventionelles und lokales System
Transformation von SK nach SL:

5
Konventionelles und lokales System

6
Konventionelles und lokales System

7
Konventionelles und lokales System

8
Konventionelles und lokales System

9
Konventionelles und lokales System
Transformation von SK nach SL: mit

10
Geozentrisches und topozentrisches System
Transformation von SG nach ST: mit

11
Geozentrisches und topozentrisches System
Transformation von SG nach ST: mit

12
Transformation von Basisvektoren und Koordinaten
Bisher: Transformation der Basisvektoren Darstellung eines Vektors in Koordinaten Vektoren sind koordinatenunabhängig, dass heißt derselbe Vektor kann in unterschiedlichen Koordinaten ausgedrückt werden

13
Transformation von Basisvektoren und Koordinaten
Bisher: Transformation der Basisvektoren Transformation der Koordinaten Vektoren und Koordinaten transformieren sich entsprechend

14
Transformation von Basisvektoren und Koordinaten
Beispiel: Zenitrichtung

15
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
16
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
17
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
18
Globales geozentrisches und konventionelles System
Transformation von SK nach SG: mit kleinen Klaffungswinkeln Mit der Drehmatrix:

19
Globales geozentrisches und konventionelles System

20
Globales geozentrisches und konventionelles System
Koordinatenunabhängig: Transformation der Koordinaten

21
Globales geozentrisches und konventionelles System
Koordinatenunabhängig: Transformation der Koordinaten Mit dem Maßstab M=1+m Ähnlichkeitstransformation (7 Parameter) 3 Translationsparameter 3 Rotationsparameter 1 Maßstab
 3 Translationsparameter. 3 Rotationsparameter. 1 Maßstab.")
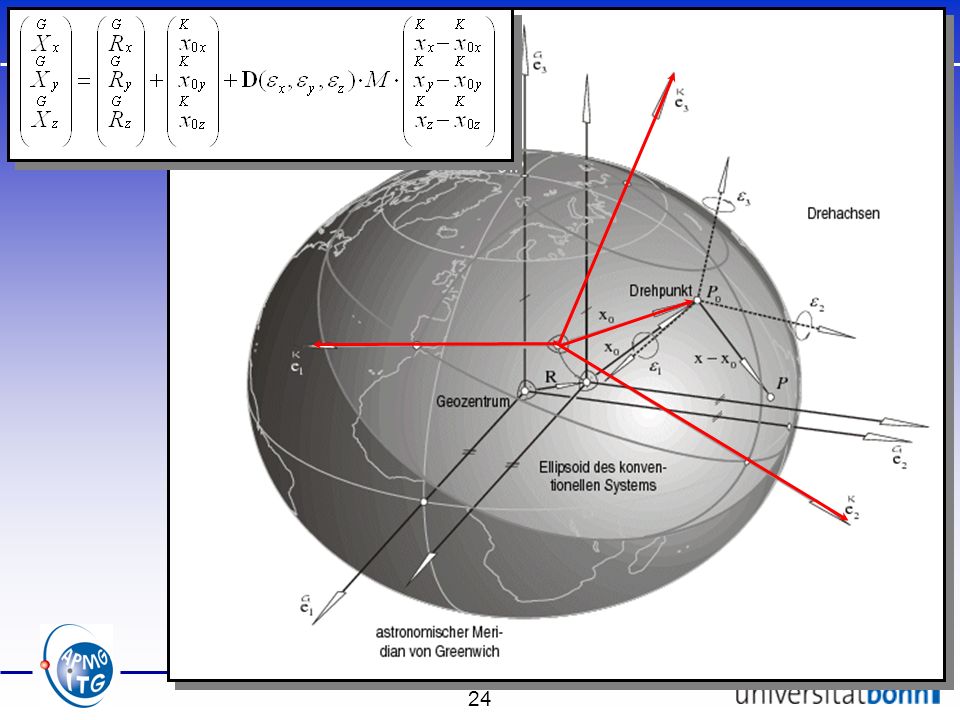
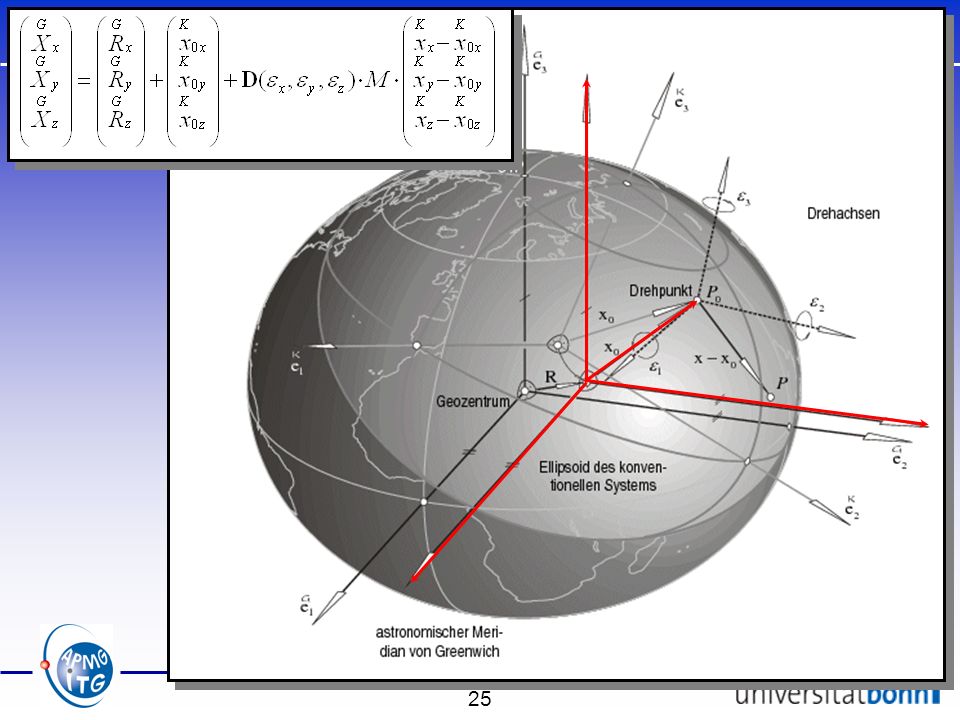
22
Globales geozentrisches und konventionelles System
Bisher: Drehung um den Ursprung von SK Neu: Drehung um beliebigen Punkt x0 Koordinatenunabhängig: Transformation der Koordinaten

26
Spezielle Transformationen
Modell von Bursa-Wolf Drehpunkt ist der Ursprung des Systems SK Drehachsen sind Achsen des Systems SK Modell von Molodensky-Badekas Drehpunkt ist der Fundamentalpunkt der Landesvermessung Drehachsen sind Achsen des Systems SK Modell von Veis Drehpunkt ist der Fundamentalpunkt der Landesvermessung Drehachsen sind Achsen des lokalen ellipsoidischen Systems SL

27
Spezielle Transformationen
Modell von Veis Drehpunkt ist der Fundamentalpunkt der Landesvermessung Drehachsen sind Achsen des lokalen ellipsoidischen Systems SL Drehmatrix Drehmatrix

28
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
29
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
30
Lotabweichungen

31
Lotabweichungen Transformation SL nach ST
(vorher Überführung in ein Rechtssystem durch Spiegelung der y-Achse)
")
32
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
33
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
34
Lotabweichungen Transformation SL nach ST
(vorher Überführung in ein Rechtssystem durch Spiegelung der y-Achse) Transformation SL nach ST über SK und SG
 Transformation SL nach ST über SK und SG.")
35
Lotabweichungen Gleichsetzen:

36
Linearisierung bei kleinen Winkeln
Taylorentwicklung: Linearisierung

37
Lotabweichungen Gleichsetzen:

38
Lotabweichungen Lotabweichungskomponenten Ostkomponente Nordkomponente
Azimutkomponente Orientierung des Referenzellipsoids

39
Lotabweichungen Lotabweichungskomponenten Ostkomponente Nordkomponente
Azimutkomponente Bei Parallelität der globalen Systeme: Ostkomponente Nordkomponente Azimutkomponente

40
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
41
Koordinatensysteme und Transformationen
SG Global Geozentrisch εx, εy, εz Bursa-Wolf, Molodensky-Badekas … SK Konventionell (global), Geodätisch T(λ,φ) (astronomische Länge, Breite) T(L,B) (ellipsoidische Länge, Breite) ST Topozentrisch, lokal astronomisch SL Lokal ellipsoidisch η, ξ, ψ (Lotabweichungen)
, Geodätisch. T(λ,φ) (astronomische. Länge, Breite) T(L,B) (ellipsoidische. Länge, Breite) ST. Topozentrisch, lokal astronomisch. SL. Lokal ellipsoidisch. η, ξ, ψ. (Lotabweichungen)")
42
Lokales ellipsoidisches System

43
Lokales ellipsoidisches System

44
Lokales ellipsoidisches System

45
Lokales ellipsoidisches System

46
Lokales und Topzentrisches System

47
Lokales und Topzentrisches System

48
Lokales und Topzentrisches System

49
Lokales und Topzentrisches System
Lot astronomischer Zenit geodätischer Zenit astronomisch Nord geodätisch Nord astronomisch Ost geodätisch Ost geodätischer Meridian geodätischer Parallelkreis

50
Lokales und Topzentrisches System
Gemessen: Azimut a, Zenitdistanz z, Strecke d Gesucht: Größen im konventionellen / lokal ellipsoidischen System Erste Möglichkeit: 1. Umrechnung polar kartesisch 2. Transformation in lokal ellipsoidisch mit

51
Lokales und Topzentrisches System
Gemessen: Azimut a, Zenitdistanz z, Strecke d Gesucht: Größen im konventionellen / lokal ellipsoidischen System Zweite Möglichkeit: Anbringen von Korrektionen direkt an die gemessenen Größen Azimutdifferenz: Zenitdistanzdifferenz: Größen im lokal astronomischen System (gemessen) Größen im lokal ellipsoidischen System
 Größen im lokal ellipsoidischen System.")
52
Lokales und Topzentrisches System
mit Einsetzen der Polarkoordinaten liefert:

53
Lokales und Topzentrisches System
Nach Taylorentwicklung und Abbruch nach dem linearen Term:

54
Lokales und Topzentrisches System
Gemessen: Azimut a, Zenitdistanz z, Strecke d Gesucht: Größen im konventionellen / lokal ellipsoidischen System Zweite Möglichkeit: Anbringen von Korrektionen direkt an die gemessenen Größen Azimutdifferenz: Zenitdistanzdifferenz: Größen im lokal astronomischen System (gemessen) Größen im lokal ellipsoidischen System
 Größen im lokal ellipsoidischen System.")
Ähnliche Präsentationen







 U N I V E R S I T Ä T H A M B U R G November 2012.>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")

Media Landesanstalt für Kommunikation Baden-Württemberg (LFK) Landeszentrale für Medien und Kommunikation.>")








