Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Modellbasierte Software-Entwicklung eingebetteter Systeme
Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für offene Kommunikationssysteme FOKUS

2
Fragestunde Wie modelliert man physikalische Sachverhalte? Beispiele?
Wie werden Gleichungen in Diagramme übersetzt? Was kann bei Rückkopplungen passieren? Lösungsmöglichkeit? Abstraktion von Blöcken? Was ist eine Trajektorie? Was sind Bereiche für Trajektorien?

3
Zustandsraum kontinuierlicher Systeme
these slides thanks to Stephan Merz, LORIA / INRIA

4
Terminologie

5
Existenz und Eindeutigkeit von Lösungen

6
Probleme mit der Existenz (1)
")
7
Probleme mit der Existenz (2)
")
8
Experiment?

9
Lipschitz-Stetigkeit

10
Existenz und Eindeutigkeit von Trajektorien

11
Näherungslösungen

12
gesteuerte Systeme

13
Im Beispiel gesucht: „sanfte“ Regelung
Füllstandsanzeiger Zulauf Ablauf max min Im Beispiel Zulauf sei kontinuierlich regelbar (0 z(t) 1) Annahme: min = max = soll der Füllstand sollte möglichst nahe an soll gehalten werden intendiertes Verhalten: je näher der Füllstand bei soll ist, desto mehr wird der Zulauf geschlossen erlaubtes Verhalten: voller Zulauf bis soll erreicht wird, dann zu (oszilliert, ruiniert auf Dauer das Ventil) verboten: max wird irgendwann überschritten und Ventil ist auf gesucht: „sanfte“ Regelung
 1) Annahme: min = max = soll. der Füllstand sollte möglichst nahe an soll gehalten werden. intendiertes Verhalten: je näher der Füllstand bei soll ist, desto mehr wird der Zulauf geschlossen. erlaubtes Verhalten: voller Zulauf bis soll erreicht wird, dann zu (oszilliert, ruiniert auf Dauer das Ventil) verboten: max wird irgendwann überschritten und Ventil ist auf. gesucht: „sanfte Regelung.")
14
Regelungstechnik Eingebettetes System:
Umgebung Allgemeines Schema eines Regelkreises: © Prof. Dr.-Ing. Ch. Ament

16
Reglerklassen Proportionaler, integraler und differentialer Anteil bei der Regelung P-Regler: u(t)=k*e(t) I-Regler: u(t)=k*e(t) dt D-Regler: u(t) = k*e(t) PI-Regler: u(t) = k1*e(t) + k2*e(t) dt PD-Regler: u(t) = k1*e(t) + k2*e(t) PID-Regler: u(t) = k1*e(t) + k2*e(t) dt + k3*e(t) u(t) = KP*[e(t) + 1/TI*e(t) dt + TD *e(t)] KP: Proportionalbeiwert, TI: Nachstellzeit, TD: Vorhaltezeit Ziel: Vermeidung bzw. Dämpfung von Überschwingungen „Reiner“ Differenzierer nicht realisierbar (Verzögerung!)
=k*e(t) dt. D-Regler: u(t) = k*e(t) PI-Regler: u(t) = k1*e(t) + k2*e(t) dt. PD-Regler: u(t) = k1*e(t) + k2*e(t) PID-Regler: u(t) = k1*e(t) + k2*e(t) dt + k3*e(t) u(t) = KP*[e(t) + 1/TI*e(t) dt + TD *e(t)] KP: Proportionalbeiwert, TI: Nachstellzeit, TD: Vorhaltezeit. Ziel: Vermeidung bzw. Dämpfung von Überschwingungen. „Reiner Differenzierer nicht realisierbar (Verzögerung!)")
17
informell PID-Regler:
P(proportionaler) Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein“ I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden“ D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen“
 Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen")
18
PID in Scicos Als fester vorgegebener Block verfügbar!

19
Überschwingungen ohne integralen Anteil mit integralem Anteil

20
Einstellung des Reglers
Erst den proportionalen Anteil einstellen erhöhen bis leichte Oszillation auftritt Dann integralen Teil hochregeln solange bis die Oszillation aufhört Dann differentiellen Anteil damit Zielgerade möglichst schnell erreicht wird Parameter Anstiegszeit Überschwingung Einschwingzeit Abweichung P -- + +- - I ++ D

21
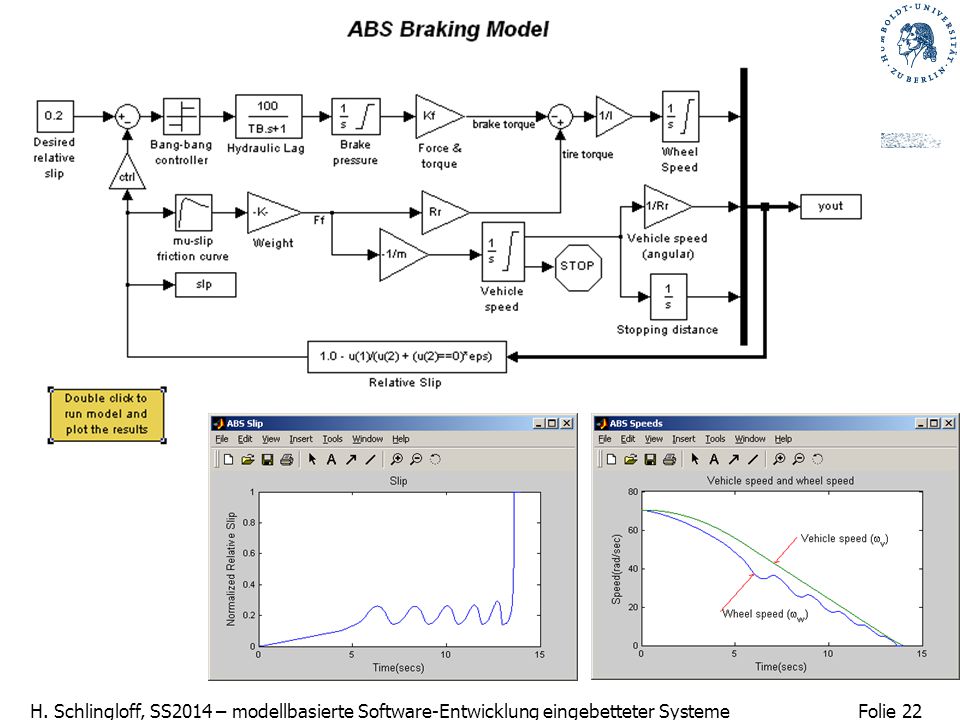
Beispiel Wasserstandsregelung

23
nochmal Pendel Aufstellen physikalischer Schwingungsgleichungen
Erstellen eines Simulationsmodells (Strecke/Regelung) Simulation und Validierung des Modells Codegenerierung
 Simulation und Validierung des Modells. Codegenerierung.")
24
einfaches Pendel Ansatz: Trägheitskraft = Rückstellkraft
Länge L Masse m Auslenkung s Ansatz: Trägheitskraft = Rückstellkraft m*s= -m*g*sin =s/L m*s=-m*g*sin(s/L) Anfangsbedingung (0) bzw. s(0) Analytische Lösung meist schwierig / nicht nötig Simulation: Auflösen nach der höchsten Ableitung s=-g*sin(s/L) „tu so als wenn s gegeben wäre und male ein Diagramm“
 Anfangsbedingung (0) bzw. s(0) Analytische Lösung meist schwierig / nicht nötig. Simulation: Auflösen nach der höchsten Ableitung. s=-g*sin(s/L) „tu so als wenn s gegeben wäre und male ein Diagramm")
25
inverses Pendel Modellierung der Strecke mit Wagen und Pendel
Modellierung der Strecke mit Wagen und Pendel

26
inverses Pendel Wagen: F=U-M*x Pendel: FT*cos() = Fg * sin()
 = Fg * sin()")
27
Fraunhofer

Ähnliche Präsentationen
















 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2012.>")

