Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Universität zu Köln Historisch-Kulturwissenschaftliche Informationsverarbeitung Softwaretechnologie II (Teil 2): Simulation und 3D Programmierung Prof. Dr. phil. Manfred Thaller SS 2012

2
1. Kollisionen auflösen 1.1 Impulse 1.2 Kollisionsimpulse 1.3 Durchdringungen beheben 1.4 Einbinden in das Programm 2. Ruhende Kontakte und Reibung 2.1 Ruhende Kräfte 2.2 Mikro-Kollisionen 2.3 Reibungsarten 2.4 Einbinden von Reibung 2.5 Berechnungsproblem

3
1.1 Impulse 1.2 Kollisionsimpulse 1.3 Durchdringungen beheben 1.4 Einbinden in das Programm

4
Objekte werden bei Kollision eingedrückt Kraft gleicht diese Verformung aus und stößt Objekte auseinander Geht zu schnell um es realistisch zu berechnen

5
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Kontaktkoordinaten

6
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Wechsel der Geschwindigkeit Lineare Komponente Abhängig von Impulsrichtung und inverser Masse Winkelkomponente Abhängig von Winkelgeschwindigkeit und Position zum Ursprung

7
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Wechsel des Impulses

8
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Geschwindigkeit nach Kollision Geschwindigkeit nach Kollision ergibt sich aus Kontaktgeschwin- digkeit und Rück- gabekoeffizient

9
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Impuls nach Kollision Ergebnis auf Punkt 4. in Impuls umrechnen

10
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision 5.Impuls nach Kollision 6.Anwendung Anwendung

11
Lösungsmethoden Lineare Projektion Geschwindigkeits- basierte Lösung Nichtlineare Projektion Relaxation

12
Wie werden mehrere Kontakte behandelt? Sortiert nach Schwere Feste Iterationszahl um Kollisionen und Geschwindigkeit zu bearbeiten

13
Alternative: doppelt verlinkte Liste

14
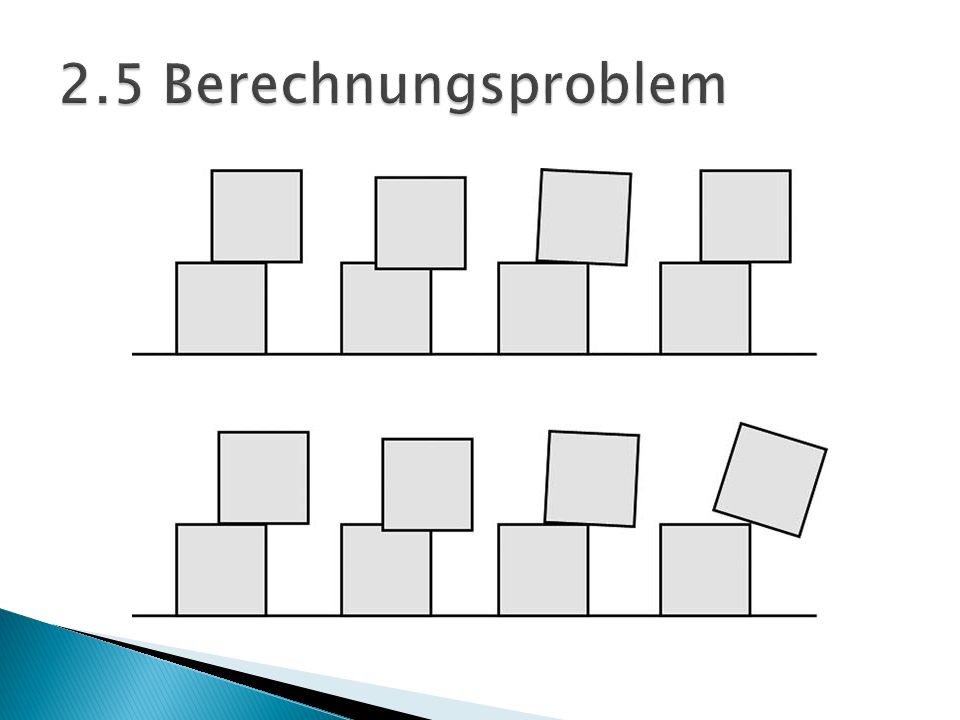
2.1 Ruhende Kräfte 2.2 Mikro-Kollisionen 2.3 Reibungsarten 2.4 Einbinden von Reibung 2.5 Berechnungsproblem

15
3. Newtonsches Gesetz: Aktion/Reaktion Kraft zieht erstes Objekte in das zweite Objekt Gegenkraft hält Gleichgewicht

16
Ruhende Kräfte als Serie von Impulsen Problem: Objekte hüpfen Entfernen der Geschwindigkeit Verringern des Rückgabe- koeffizienten

17
Statische Reibung Dynamische Reibung Isotropische Reibung Anisotropische Reibung

18
1.Kontaktkoordinaten 2.Wechsel der Geschwindigkeit Jetzt für alle drei Achsen 3.Wechsel des Impulses 4.Geschwindigkeit nach Kollision Neu: If-Abfrage zur Überprüfung von dynamischer oder statischer Reibung 1.Impuls nach Kollision 2.Anwendung

Ähnliche Präsentationen


 Schwingungen>")

 U N I V E R S I T Ä T H A M B U R G November 2012.>")








 Prof. Th. Ottmann.>")




: Simulation und 3D Programmierung>")

