Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Software-Engineering II Eingebettete Systeme, Softwarequalität, Projektmanagement
Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für Rechnerarchitektur und Softwaretechnik

2
Hinweis: Am Freitag entfällt die Vorlesung!
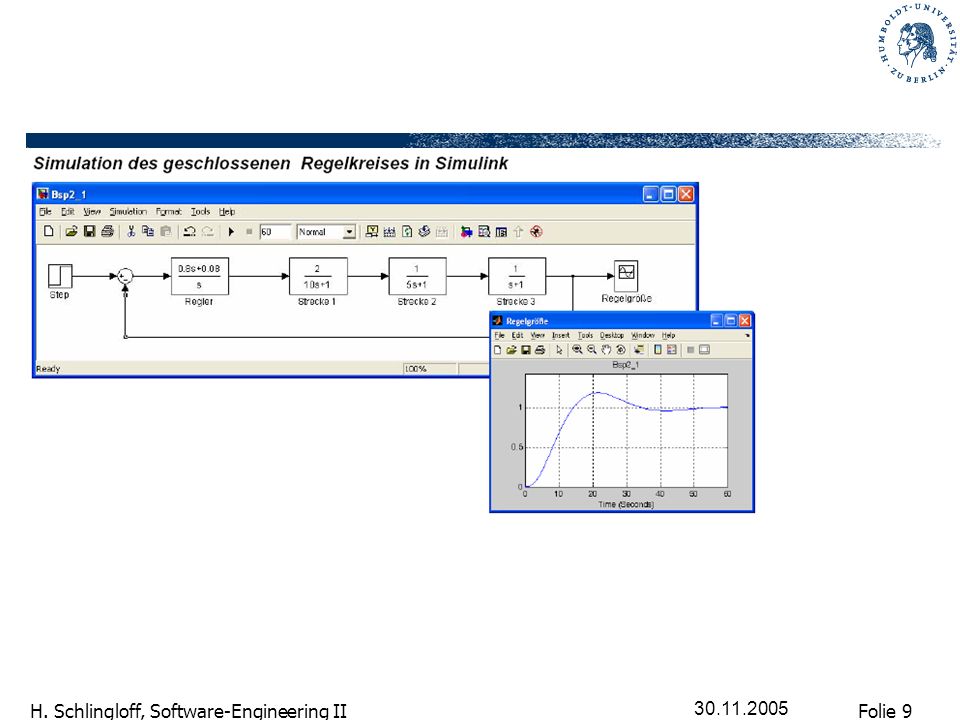
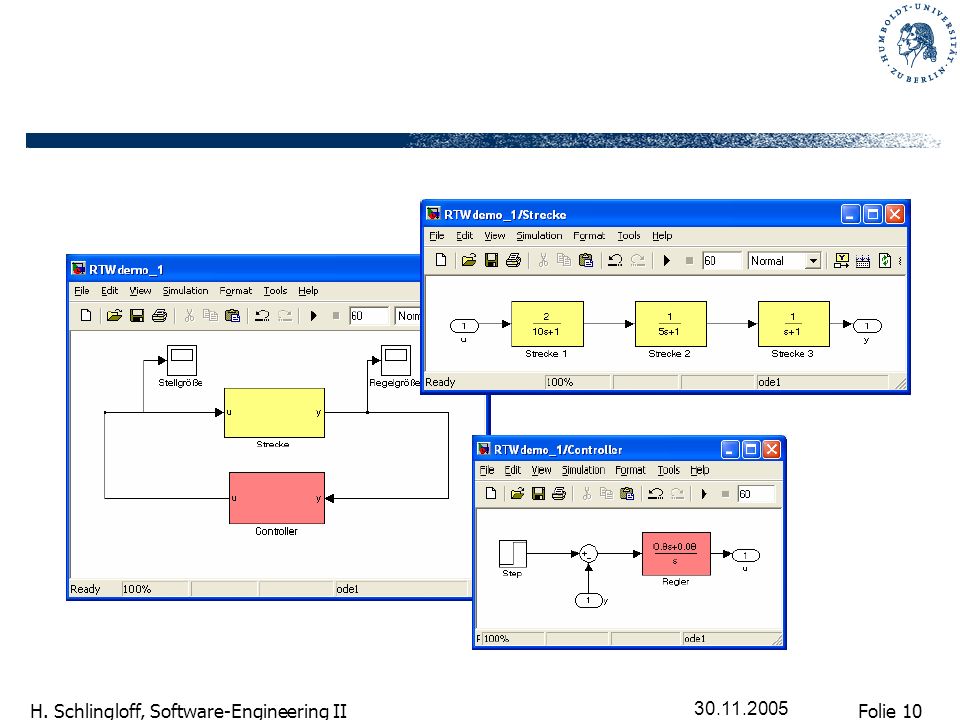
(Tagung M4M – Methods for Modalities) heute nochmals: Thema Modellierung / Simulation
 heute nochmals: Thema Modellierung / Simulation")
3
Pendel Aufstellen physikalischer Schwingungsgleichungen
Erstellen eines Simulationsmodells (Strecke/Regelung) Simulation und Validierung des Modells Codegenerierung
 Simulation und Validierung des Modells. Codegenerierung")
4
einfaches Pendel Ansatz: Trägheitskraft = Rückstellkraft
Länge L Masse m Auslenkung s Ansatz: Trägheitskraft = Rückstellkraft m*s= -m*g*sin =s/L s+g*sin(s/L)=0 Anfangsbedingung (0) bzw. s(0) Linearisierung: für kleine gilt sin s=(-g/L)* s Analytische Lösung oder Simulation
=0. Anfangsbedingung (0) bzw. s(0) Linearisierung: für kleine gilt sin s=(-g/L)* s. Analytische Lösung oder Simulation")
5
inverses Pendel Modellierung der Strecke mit Wagen und Pendel
Modellierung der Strecke mit Wagen und Pendel

6
inverses Pendel Wagen: F=U-M*x Pendel:

7
FIRST Fehlertolerante Realisierung!

8
Crashkurs Regelungstechnik
Wiederholung: © Prof. Dr.-Ing. Ch. Ament

11
Steuerbarkeit und Beobachtbarkeit
lineares DGL-System. Sei x der Vektor der Regelgrößen, u der Vektor der Stellgrößen und y ein Vektor von Messgrößen. Das System x[t+1]=A*x[t]+B*u[t] ist steuerbar mit Schrittweite n, wenn es zu jedem Wertepaar p, q eine Folge u[0],…,u[n-1] gibt mit p=x[0] und q=x[n] intuitiv: das System lässt sich von p nach q steuern Ein System mit x[t+1]=A*x[t]+B*u[t] und y[t+1]=C*x[t]+D*u[t] ist beobachtbar, wenn aus der Steuerfolge u[0],…u[n-1] und der Messwertfolge y[0],…, y[n-1] mit der Schrittzahl N der unbekannte Anfangszustand x[0] bestimmt werden kann intuitiv: der Zustand lässt sich aus dem Verhalten ableiten Erweiterungen für den kontinuierlichen Fall Charakterisierung mit algebraischen Mitteln

12
Reglerklassen Proportionaler, integraler und differentialer Anteil bei der Regelung P-Regler: u(t)=k*e(t) I-Regler: u(t)=k*e(t) dt D-Regler: u(t) = k*e(t) PI-Regler: u(t) = k1*e(t) + k2*e(t) dt PD-Regler: u(t) = k1*e(t) + k2*e(t) PID-Regler: u(t) = k1*e(t) + k2*e(t) dt + k3*e(t) u(t) = KP*[e(t) + 1/TI*e(t) dt + TD *e(t)] KP: Proportionalbeiwert, TI: Nachstellzeit, TD: Vorhaltezeit Ziel: Vermeidung bzw. Dämpfung von Überschwingungen „Reiner“ Differenzierer nicht realisierbar (Verzögerung!)
=k*e(t) dt. D-Regler: u(t) = k*e(t) PI-Regler: u(t) = k1*e(t) + k2*e(t) dt. PD-Regler: u(t) = k1*e(t) + k2*e(t) PID-Regler: u(t) = k1*e(t) + k2*e(t) dt + k3*e(t) u(t) = KP*[e(t) + 1/TI*e(t) dt + TD *e(t)] KP: Proportionalbeiwert, TI: Nachstellzeit, TD: Vorhaltezeit. Ziel: Vermeidung bzw. Dämpfung von Überschwingungen. „Reiner Differenzierer nicht realisierbar (Verzögerung!)")
13
informell PID-Regler:
P(proportionaler) Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein“ I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden“ D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen“
 Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen")
14
PID in Simulink Als fester vorgegebener Block verfügbar!

15
Einstellung des Reglers
Erst den proportionalen Anteil einstellen erhöhen bis leichte Oszillation auftritt Dann integralen Teil hochregeln solange bis die Oszillation aufhört Dann differentiellen Anteil damit Zielgerade möglichst schnell erreicht wird Parameter Anstiegszeit Überschwingung Einschwingzeit Abweichung P -- + +- - I ++ D

16
Beispiel Wasserstandsregelung
Hausaufgabe!

Ähnliche Präsentationen















 Schwingungen>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2012.>")
 U N I V E R S I T Ä T H A M B U R G November 2012.>")
