Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Roboter-Fußball: Die RoboCup- Initiative Prof. Dr. Raúl Rojas Freie Universität Berlin mit freundlicher Unterstützung von Prof. Bernhard Nebel Albert-Ludwigs-Universität Freiburg

2
Roboter-Fußball Seit 1997: RoboCup-Initiative, Mirosot RoboCup - Zusammen mit KI-Konferenz I - Simulationsliga II - Kleine Roboter-Liga III- Mittlere Roboter-Liga IV- Sony-Hunde

3
Die Simulationsliga Soccer server Einfache Aktionen Autonome Spieler Schneller Einstieg

4
Die Liga der mittelgroßen Roboter Spielfeld 9 5 Meter Vier gegen vier

5
Das Freiburger Team (Prof. Nebel) Pioneer 1 Roboter Libretto Notebook WaveLan Radio-Ethernet Schußapparat Vision System 7 Sonars SICK Laser Scanner Interne Odometrie
 Pioneer 1 Roboter Libretto Notebook WaveLan Radio-Ethernet Schußapparat Vision System 7 Sonars SICK Laser Scanner Interne Odometrie.")
6
Team-Architektur Spieler Globale Sensor- Integration User Interface Kommunikation Externer Rechner Funk

7
Spieler-Architektur Perzeptions- Module Verhaltens -basierte Steuerung Pfadplanung Sensoren Kommunikation Aktuatoren

8
Perzeptions-Modul Selbst- findung Spieler- Erkennung Ball- Erkennung Modell- Bildung Laser- scanner Odometrie Vision Sonar Roboter-Position Sensor-Integration scan Welt- Modell

9
Selbstlokalisation und Scan- Matching Scanlinien werden in Korrespondenz zu Modellinien gebracht

10
Spieler-Erkennung Laserscan-Punkte

11
Lokales Weltmodell: enthält alle wahrgenom- menen Objekte Nicht sichtbare Objekte werden erinnert

12
Globales Weltmodell

13
Multi-Roboter-Sensorintegration Alle Spieler melden ihre Schätzungen (mit Zeitstempel). Schätzungen der Spieler werden gemittelt. Objekte werden lokal verfolgt. Freund-Gegner Unterscheidung: die eigenen Spieler melden ihre Position ! Die Information wird an alle Spieler zurückgeschickt.

14
Verhaltensbasierte Steuerung (Torwart) Minimieren des Winkels Ball fangen Zum Ball drehen
 Minimieren des Winkels Ball fangen Zum Ball drehen")
15
Raumdeckung

16
Kooperation durch Nachrichten

17
Video - Middle Size League

18
Die Liga der kleinen Roboter 18 cm maximaler Durchmesser

19
Spielfeldaufbau Globale Kamera Externer Rechner Funkverbindung

20
Bild aus der Videokamera 1,52 2,74 Meter 640 480 Pixel

21
RoboCup: Gruppe D, Stockholm On-board-Elektronik Funk Motoren

22
Die Motoren Ein Motor pro Rad 1 m/s 16 Impulse pro Drehung Feed-back-Schleife: Elektronik gleicht Soll- und Ist-Wert aus

23
Unser Board-Computer M6805-Mikrocontroller 8K EEPROM 16 Digitale I/O-Ports 8 Analog-Eingaben 2 Analog-Ausgaben (PWM) Status-LEDs RS-232-Schnittstelle
 Status-LEDs RS-232-Schnittstelle")
24
Funkverbindung Mikrocontroller Wireless link SE-200 (9600 Baud, 433-434 MHz) Roboter-ID
 Roboter-ID")
25
Der Schußapparat Rotierende Platte

26
Video - Small Size League

27
Block-Diagramm der Software Benutzer- schnittstelle Funk- verbindung Reaktives Verhalten Vision- System

28
Benutzerschnittstelle Vision Automatische Steuerung Initialisierung Visualisierung Manuelle Steuerung

29
Vision-System Ball-Modul Team-Modul Update- Modul Frame Grabber Koordinatentransformtion: Roboter, Ball, Hindernisse

30
Ballverfolgung

31
Brook‘s Subsumption-Architecture

32
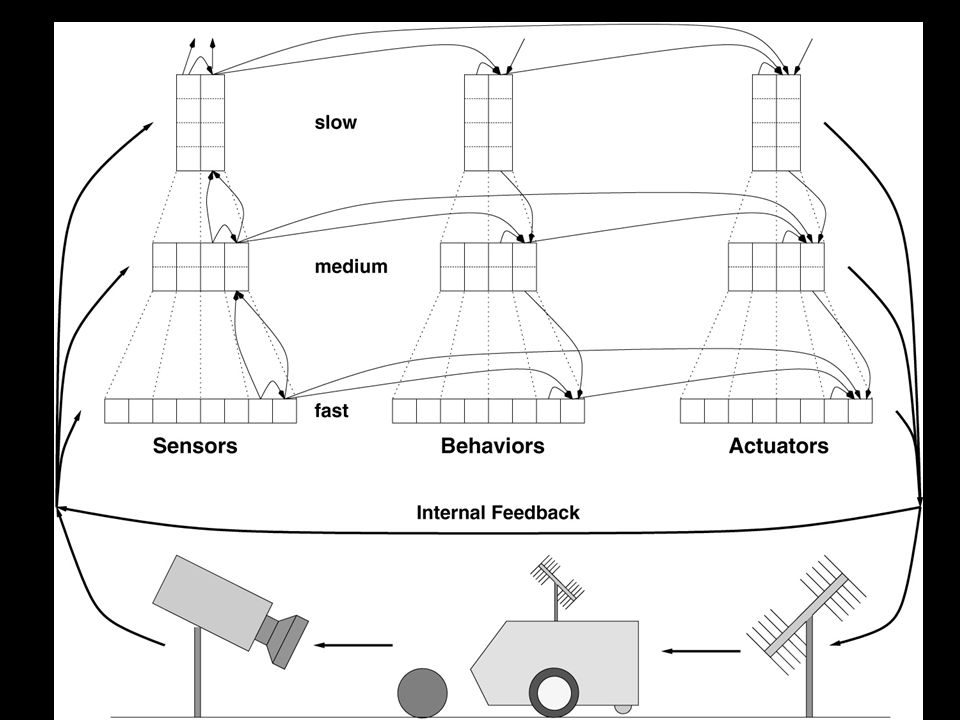
Erweiterte Dynamic-Architecture langsam mittel schnell Sensoren Verhalten Aktuatoren

34
Reaktives Verhalten

35
Iterative Pfadplanung

36
Torwartverhalten

37
FU-Fighters versus Big Red

38
Die FU-Fighters Lindstrot, Rojas, de Melo, Behnke, Tenchio Sprengel, Frötschl, Simon, Akers, Schebesch

39
Abschlußvideo

Ähnliche Präsentationen



>")




 Oliver Brand Learning Lab Lower Saxony (L3S) Hannover.>")










. Benutzer.>")