Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Wechselbeziehungen zwischen Mensch und Fahrzeug
Prof. DI Dr.techn.DDr.hc. Ernst Fiala Mitglied des Vorstands (R&D) der Volkswagen AG i.R. IVK TU Wien, WS 2010/11 Das Thema der Vorlesung ist Teil des Mensch/Technik/Umwelt-Problems, im engeren Sinn das Zusammenwirken der Eigenschaften des Menschen und des Fahrzeugs. Es geht um die Führung des Fahrzeugs (human operator, Kenngrößen des Fahrzeugs), die Rückwirkungen infolge der Emissionen (Schadstoffe, CO2), Straßenwelligkeit und der Belastung beim Unfall. siehe auch
 der Volkswagen AG i.R. IVK TU Wien, WS 2010/11. Das Thema der Vorlesung ist Teil des Mensch/Technik/Umwelt-Problems, im engeren Sinn das Zusammenwirken der Eigenschaften des Menschen und des Fahrzeugs. Es geht um die Führung des Fahrzeugs (human operator, Kenngrößen des Fahrzeugs), die Rückwirkungen infolge der Emissionen (Schadstoffe, CO2), Straßenwelligkeit und der Belastung beim Unfall. siehe auch")
2
1. Fahrkinetik Ernst Fiala WS 2010/11

3
Einfachstes Fahrzeugmodell: Radstand, Lenkwinkel
Lenkwinkel L = Radstand a / Radius R, << 1 Krümmung k = 1/R [1/m] L R = 1/k sin (0.1) = cos (0.1) = L a
 = cos (0.1) = L. a.")
4
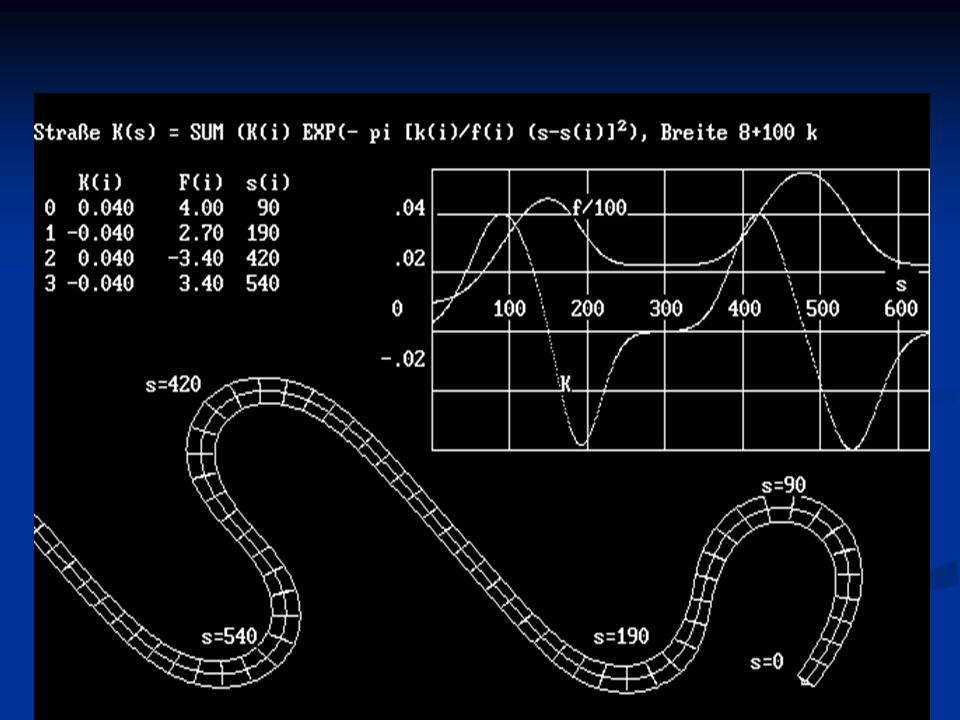
k = SUM( i=1-9999 ) ki EXP (-pi ki / fi (s-si)²)
k = RS/R k = ko EXP(-s²) s = v * t si k = kn EXP(s-si)² f = INT(k ds) k = SUM( i= ) ki EXP (-pi ki / fi (s-si)²) i…. Nummer der Kurve i ki….Scheitelkrümmung der Kurve i fi….Richtungsänderung in der Kurve i si….Wegkoordinate der Kurve i
 s = v * t. si. k = kn EXP(s-si)². f = INT(k ds) k = SUM( i= ) ki EXP (-pi ki / fi (s-si)²) i…. Nummer der Kurve i ki….Scheitelkrümmung der Kurve i fi….Richtungsänderung in der Kurve i si….Wegkoordinate der Kurve i.")
5
k = SUM( i=1-9999 ) ki EXP (- pi ki /fi (s-si)²)
k…Krümmung an der Stelle s, ki … Scheitelkrümmung in s=si fi…Richtungsänderung in der Kurve i Von k abhängig (f(k)): - Straßenbreite, - Steigung, - Querneigung Zweckmäßig: ki= konst = -k(i) Ein ganzer Straßenzug wird dann von Vorzeichen ki, fi und si beschrieben. Wenn lokal zugespielt, kann links/rechts, R=1/ki oder v = 3.6*SQR(bQ/ki), fi *180/pi zugespielt werden (wie Rallyansage: „links, 110 km/h, 37°, eventuell noch Steigung, Gang, Straßenbreite“)
): - Straßenbreite, - Steigung, - Querneigung. Zweckmäßig: ki= konst = -k(i) Ein ganzer Straßenzug wird dann von Vorzeichen ki, fi und si beschrieben. Wenn lokal zugespielt, kann links/rechts, R=1/ki oder v = 3.6*SQR(bQ/ki), fi *180/pi zugespielt werden (wie Rallyansage: „links, 110 km/h, 37°, eventuell noch Steigung, Gang, Straßenbreite )")
6
f Bild k(s) und Zug f(i) ff
 und Zug f(i) ff")
8
Die Krümmung ist eine Funktion des Weges s; Steigung, Straßenbreite und Querneigung sind eine Funktion der Krümmung k.

9
human operator

10
Blockdiagramm Fahrzeugführung
BP Blockdiagramm Fahrzeugführung

11
5 Elemente: Eingabe, Ausgabe, fixes Programm, erlerntes Programm, Verarbeitung

12
< 100 b/s

14
Zentralnervensystem und Computer haben die gleichen 5 Bestimmungsstücke:
Eingabe (Tastatur, Disk; Sinne), Ausgabe (Bildschirm; Muskel), zentrales Rechenwerk (CPU; ZNS), festes Programm (ROM; Gene) und Speicher (PROM; Gedächtnis). Unterschied: Bewusstsein. .
, Ausgabe (Bildschirm; Muskel), zentrales Rechenwerk (CPU; ZNS), festes Programm (ROM; Gene) und. Speicher (PROM; Gedächtnis). Unterschied: Bewusstsein. .")
15
Wie viele bit sind erforderlich um einen Gegenstand zuerkennen?

16
Wer entscheidet was man sieht?

17
Antwort xa auf ein Eingangssignal xe

18
Meist genügt diese Vereinfachung ( 1 < T1 <2 s)
xa + T1 dxa/dt = xe dxa/dt = (xe –xa)/ T1 Meist genügt diese Vereinfachung ( 1 < T1 <2 s)
/ T1. Meist genügt diese Vereinfachung ( 1 < T1 <2 s)")
19
Fahrzeug

20
1864 VM Siegfried Marcus, 1864 (1870?) Der Verbrennungsmotor muss drehen um ein Moment liefern zu können. (el. Zündung, siehe Batterie)
")
21
Daimler-Motorwagen 1896

22
Benz Patent-Motorwagen 1896

23
1889: Daimler/Maybach: Stahlradwagen Erstes 4-rädiges Auto (Ackermannlenkung in Gabeln) löst in Frankreich die breite Entwicklung aus
 löst in Frankreich die breite Entwicklung aus")
24
Achsschenkellenkung 1818 und 1893

25
Benz Velo 1894 Erstes Serienauto
Siehe Bremse: am Radumfang, einseitig hinten. Praktische Entwicklung in Frankreich

26
Richtungsstabilität nach Störung und beim Bremsen Sv=kv ß, Sh=kh ß (ß…
Richtungsstabilität nach Störung und beim Bremsen Sv=kv ß, Sh=kh ß (ß…..Schräglaufwinkel)
")
27
Alois Riedler (1850-1936): Wissenschaftliche Automobilwertung, 1911
: Wissenschaftliche Automobilwertung, 1911")
28
Fahrdynamik

29
P.Rieckert und E.Schunck, 1940
ah dpsi/dt ßh = ß + ah (dpsi/dt) /v, ßv = L + ß - av (dpsi/dt)/v stationär: dpsi/dt = df/dt, df/dt = v k ßh = ß + ah k, ßv = L + ß – av k
 /v, ßv = L + ß - av (dpsi/dt)/v stationär: dpsi/dt = df/dt, df/dt = v k ßh = ß + ah k, ßv = L + ß – av k.")
30
Diskussion des Einflusses verschiedener Größen am Modell

31
Fahrzeugführung quer (Lenken)
")
32
L = Einfachstes Fahrzeugmodell: der Fahrer sitzt auf der Hinterachse und blickt in der Längsachse des Fahrzeugs nach vorn. Er versucht den Punkt BP in der Entfernung e auf der Sollspur zu halten. Im gezeichneten Augenblick würde er nach rechts lenken.

33
Fahrer: P-Regler, PI-Regler

34
Einfluss der Vorhaltestrecke e (v=20 m/s)
Fahrer und Fahrzeug mit Zeitverhalten 0.1

35
Radlaständerung bei Kurvenfahrt vorn/hinten zur Veränderung der Seitenkraftbeiwerte k
Radlastunterschied vorn/hinten zur Veränderung des Seitenkraftbeiwerts k

37
Stationäre Kurvenfahrt für R=v/0.1
(„power slide“ durch Umfangskraft an der Hinterachse)
")
38
Lage der Momentanzentren und der Rollachse

39
2

40
2

41
2

44
Lenken ist schwierig, weil Integration vorhergesehen werden muss

45
Auto der Zukunft

47
AUDI A5 Coupé

48
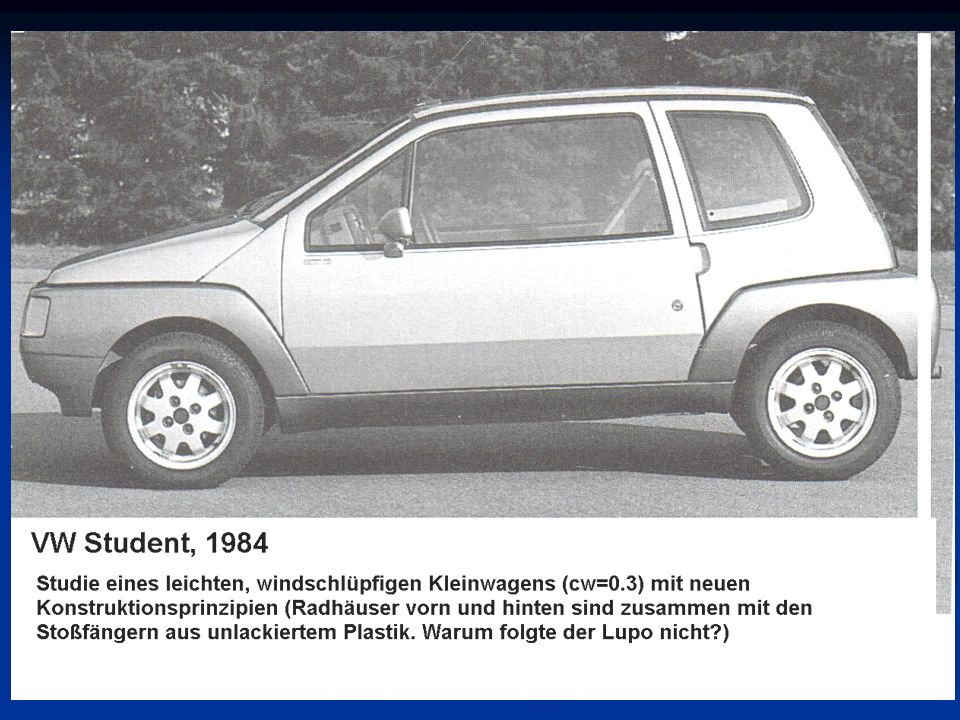
VW

50
VW Up. Lite, Detroit 2009: 800 ccm 2 Zyl. , 38 kW, 10 kW el
VW Up! Lite, Detroit 2009: 800 ccm 2 Zyl., 38 kW, 10 kW el., 150 km/h, in 12.5 s, 695 kg, m², 7 Gang DKG, 2.44 L/100 km, cwA=0.27x1.6 m² ? (keine Außenspiegel und Türgriffe, verschlossener Kühlluftdurchtritt)
")
51
In den letzten 50 Jahren wurden die Autos immer niedriger (1.8 1.4 m)
Querschnittsfläche kleiner 2 m² cw cwA m² mit SUV oder cross over m+(10-30)%, cwA + (30 – 50) % (statt 1500 kg, 0,6 m²: 1650 kg, 0.8 m²). Höherer Augpunkt!
%, cwA + (30 – 50) % (statt 1500 kg, 0,6 m²: 1650 kg, 0.8 m²). Höherer Augpunkt!")
53
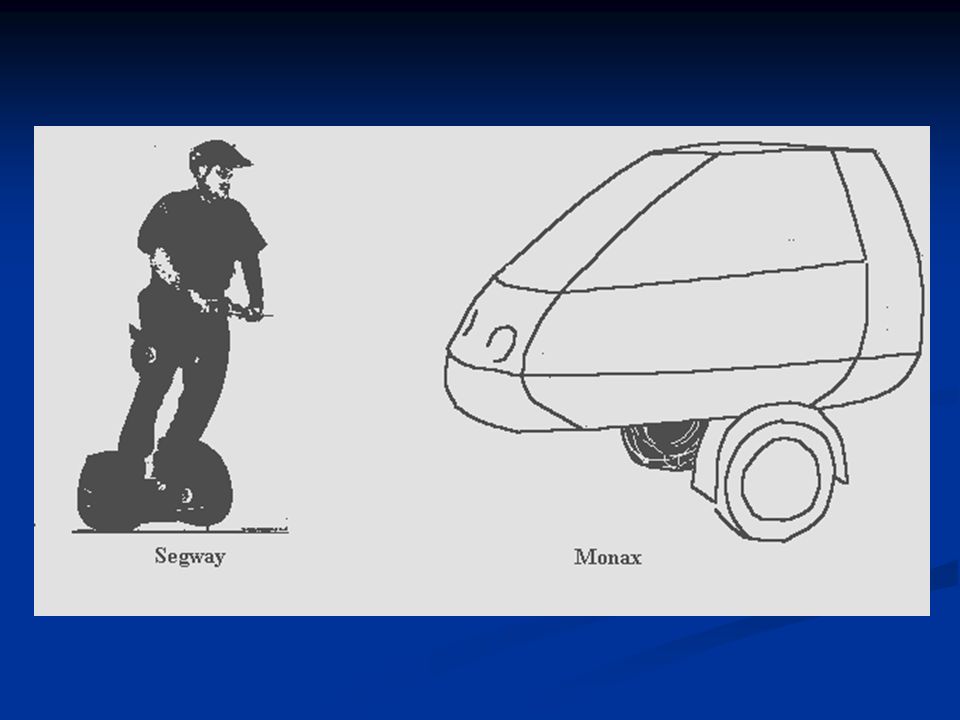
Einachsfahrzeug

54
nnnnn

55
Einspurfahrzeug Maskus 2004
130 km/h mit 1.4 L/100 km, 185 km/h mit 12 kW

56
Auslegung des Experimental Safety Vehicle ESVW, 1971
(crash-Geschwindigkeit 50 statt 30 mph, 80 statt 50 km/h)
")
57
Autogiro: Antrieb durch Propeller
Antriebsbaum nach vorn klappen, Hubpropeller zusammenfalten (4 m Länge), elektrischer Radantrieb = Stadtfahrteuglich Automatische Steuerung in Flugstraßen (auch bei Schlechtwetter) Autogiro: Antrieb durch Propeller Kurzstrecke mit gefaltetem Rotor und Radantrieb, Starten und Landen auf kleinen Plätzen (50x5 m?), zentrale Flugkontrolle auf Luftstraßen
, elektrischer Radantrieb = Stadtfahrteuglich. Automatische Steuerung in Flugstraßen (auch bei Schlechtwetter) Autogiro: Antrieb durch Propeller. Kurzstrecke mit gefaltetem Rotor und Radantrieb, Starten und Landen auf kleinen Plätzen (50x5 m ), zentrale Flugkontrolle auf Luftstraßen.")
58
Literatur: Bendat, J.S. u. A.G.Piersol: Ergodic Random Data, Wiley 1986 Dieren, W. van: Mit der Natur rechnen, ISBN X * Gould, S.J.: Zufall Mensch, Hauser 1991 * Lorenz, K.: Das sogenannte Böse, 1984 Popper, K. u. J.Eccles: Das Ich und sein Gehirn, Piper 1986 * Popper, K.: Alles Leben ist Problemlösen (1988) Riedel, R.: Die Strategie der Genesis, Piper 1986 * Reichholf, J.: Evolution des Menschen Steinbuch, K.: Automat und Mensch, Springer 1971 Triffin, R.: Monopolistic Competition...,Cambridge 1947
 Riedel, R.: Die Strategie der Genesis, Piper * Reichholf, J.: Evolution des Menschen. Steinbuch, K.: Automat und Mensch, Springer Triffin, R.: Monopolistic Competition...,Cambridge")
Ähnliche Präsentationen





 Mechtild Stiewe.>")


 Konstruktion optimaler Suchbäume Prof. Dr. Th. Ottmann.>")



 Vorlesung am 31.10.2006 Di. 13:00-14:30 Uhr; R. 1603 (Hörsaal)>")








