Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Motor und Generator

2
Motoren Schrittmotor Ansteuerung Der rotierende Magnetfeld-Vektor
Reluktanzmotor Permanentmagnetmotor Hybridmotor Ansteuerung Betriebsarten Steuerbausteine Treiberbausteine Der rotierende Magnetfeld-Vektor Vektor-Zusammensetzung Bürstenlose Gleichstrommotoren

3
Motoren Schrittmotor Reluktanzmotor (variable reluctance) VR Permanentmagnetmotor Hybridmotor Feldlinienbild einer Motoranordnung (erstellt mit vizimag) Unmagnet.Rotor mit µr = 1 Rotor mit µr = 1000 (hohe Magnetisierung) Ursache für den magnetischen Fluss Φ ist das vom Strangstrom erzeugte magnetische Feld H. Die Flussdichte B (= Φ / A ) hängt mit H zusammen gemäß B = µ0*µr*H . Als magnetische Spannung θ bezeichnet man das über die erzeugenden Ströme geschlossene Umlaufintegral über die Feldstärken längs des Wegs ℓ: θ = ΣHi*ℓi= I*N (Integral als Summe geschrieben , [θ]=1A ). Das „Ohmsche Gesetz“ des magnetischen Kreises lautet somit θ = Φ * Rm mit Rm = ℓ / (µ0*µr*A) ( [Rm] =1A/Vs ) Der magnetische Widerstand Rm heißt Reluktanz. Je nach dem Weg, den die Flusslinien nehmen, ist der Widerstand größer oder kleiner. Er hängt von der Permeabilitätszahl der betreffenden Materialien ab. Das gut magnetisierbare Eisen hat einen etwa 1000 mal geringeren magnetischen Widerstand als Luft. Das System sucht für den magnetischen Fluss jenen Weg, auf dem insgesamt der niedrigste Widerstand vorliegt und tut dies sehr kräftig = ein Drehmoment wird erzeugt.
 Unmagnet.Rotor mit µr = 1. Rotor mit µr = 1000 (hohe Magnetisierung) Ursache für den magnetischen Fluss Φ ist das vom Strangstrom erzeugte magnetische Feld H. Die Flussdichte B (= Φ / A ) hängt mit H zusammen gemäß B = µ0*µr*H . Als magnetische Spannung θ bezeichnet man das über die erzeugenden Ströme geschlossene Umlaufintegral über die Feldstärken längs des Wegs ℓ: θ = ΣHi*ℓi= I*N (Integral als Summe geschrieben , [θ]=1A ). Das „Ohmsche Gesetz des magnetischen Kreises lautet somit θ = Φ * Rm mit Rm = ℓ / (µ0*µr*A) ( [Rm] =1A/Vs ) Der magnetische Widerstand Rm heißt Reluktanz. Je nach dem Weg, den die Flusslinien nehmen, ist der Widerstand größer oder kleiner. Er hängt von der Permeabilitätszahl der betreffenden Materialien ab. Das gut magnetisierbare Eisen hat einen etwa 1000 mal geringeren magnetischen Widerstand als Luft. Das System sucht für den magnetischen Fluss jenen Weg, auf dem insgesamt der niedrigste Widerstand vorliegt und tut dies sehr kräftig = ein Drehmoment wird erzeugt")
4
Motoren Schrittmotor Reluktanzmotor (variable reluctance VR )
Permanentmagnetmotor Hybridmotor

5
Motoren Schrittmotor Reluktanzmotor (variable reluctance) VR
Permanentmagnetmotor Hybridmotor Schema der Anordnung von Stator und Rotor bei einem 3-Phasen VR-Motor mit einem vierpoligen Rotorkreuz. Es wird jeweils nur einer der drei Stänge (A,B,C) bestromt. In dieser Anordnung rotiert das Feld links herum (counterclockwise) um 60° und der Rotor rechts herum (clockwise) um jeweils α = 360° /(3 Str.*4 Pole) =30° pro Schritt.
 bestromt. In dieser Anordnung rotiert das Feld links herum (counterclockwise) um 60° und der Rotor rechts herum (clockwise) um jeweils α = 360° /(3 Str.*4 Pole) =30° pro Schritt")
6
Motoren Schrittmotor Reluktanzmotor VR (variable reluctance) Permanentmagnetmotor Hybridmotor Die unipolare Ansteuerung und Bestromung des Reluktanz-Schrittmotors

7
Motoren Schrittmotor Permanentmagnetmotor PM
Reluktanzmotor (variable reluctance VR ) Permanentmagnetmotor PM Hybridmotor Beim Permanentmagentmotor kommt zu den elektrisch erzeugten Polen des Stators das oder die permanenten Polpaare des Rotors hinzu. Auch wenn kein Strang bestromt ist, rastet der permanent magnetisierte Rotor in einer Stellung mit geringster Reluktanz ein.
 Permanentmagnetmotor PM. Hybridmotor. Beim Permanentmagentmotor kommt zu den elektrisch erzeugten Polen des Stators das oder die permanenten Polpaare des Rotors hinzu. Auch wenn kein Strang bestromt ist, rastet der permanent magnetisierte Rotor in einer Stellung mit geringster Reluktanz ein")
8
Motoren Schrittmotor Hybridmotor
Reluktanzmotor VR (variable reluctance) Permanentmagnetmotor PM Hybridmotor Aus der Kombination (Hybrid) von VR- und PM-Schrittmotor entstand der Hybrid-Schrittmotor. Der Rotor ist im Grunde ein Sandwich, bestehend aus zwei weichmagnetischen, gezahnten Polschuhen mit dazwischen liegendem axial gerichteten Dauermagneten. Die Polschuhe sind gegeneinander um 1/2 Zahnbreite versetzt. Der Stator ist ebenfalls gezahnt. Er trägt die auch die Magnet-spulen. Die aufwändigere Herstellung bringt eine feiner geteilte Schrittweite von ca. 1° aufwärts.
 Permanentmagnetmotor PM. Hybridmotor. Aus der Kombination (Hybrid) von VR- und PM-Schrittmotor entstand der Hybrid-Schrittmotor. Der Rotor ist im Grunde ein Sandwich, bestehend aus zwei weichmagnetischen, gezahnten Polschuhen mit dazwischen liegendem axial gerichteten Dauermagneten. Die Polschuhe sind gegeneinander um 1/2 Zahnbreite versetzt. Der Stator ist ebenfalls gezahnt. Er trägt die auch die Magnet-spulen. Die aufwändigere Herstellung bringt eine feiner geteilte Schrittweite von ca. 1° aufwärts")
9
Motoren Schrittmotor Hybridmotor
Reluktanzmotor VR (variable reluctance) Permanentmagnetmotor PM Hybridmotor Linke Spalte: Jeweils 1 Strang erregt, Vollschrittbetrieb Mitte: 2-Strang-Erregung, Vollschrittbetrieb Rechte Spalte: 2-Strang-Erregung, Halbschritt
 Permanentmagnetmotor PM. Hybridmotor. Linke Spalte: Jeweils 1 Strang erregt, Vollschrittbetrieb. Mitte: 2-Strang-Erregung, Vollschrittbetrieb. Rechte Spalte: 2-Strang-Erregung, Halbschritt")
10
Motoren Schrittmotor Anzahl der Schritte z = 2*p*Zr*s α = 360°/ z
Üblicherweise sind die Statorwicklungen ist 2-,3- bzw. 5-polig ausgeführt, das ergibt die Strangzahl s. s......Zahl der Stränge, p.....Zahl der Polpaare, Zr......Zähne des Rotorpols, z……Anzahl der Schritte/Umdrehung z = 2*p*Zr*s und daraus ein mechanischer Schrittwinkel von: z……Schrittanzahlzahl a ....Nennschrittwinkel α = 360°/ z z.B.: Für einen unipolaren Motor mit einem Polpaar und drei Strängen ergibt sich eine Schrittzahl z von 6 pro Umdrehung 1 Magnetpolpaar, 3 Stränge p=1, ms=3 z=2*1*3=6 α=360°/6 =60° 2 Magnetpolpaare, 3 Stränge p=2, ms=3 z=2*2*3=12 α=360°/12=30°

11
Kenngrößen eines Schrittmotors
Phasenzahl: Gebräuchlich sind Schrittmotoren mit ein bis fünf Phasen (=Strängen, =Spulen) Einphasige Motoren haben in der klassischen Antriebstechnik eine geringe Bedeutung. Die größte Verbreitung hat der 2-Phasenmotor mit seinen Varianten gefunden. Ein 4-Phasen Schrittmotor ist im Grunde ein 2-Phasenmotor mit getrennt herausgeführten Wicklungsanschlüssen. 5-Phasen Schrittmotoren bieten ein wesentlich besseres Laufverhalten und eine von Natur aus höhere Schrittauflösung. Schrittwinkel: Er besagt, welcher Drehwinkel mit dem Motor ohne elektronische Zusatzmaßnahmen aufzulösen ist. Die Angabe der Schrittzahl pro Umdrehung besagt sinngemäß dasselbe. Datenblattwerte beziehen sich auf Voll- oder Halbschritt. Phasenstrom: Auf diesen Wert bezieht sich das Nennmoment des Motors. Mit diesem Strom kann der Motor i. allg. auch dauernd betrieben werden, ohne dass er zu heiß wird. Haltemoment: Das Haltemoment gibt an, welches Moment der Motor im Stillstand halten kann, ohne dass dieses eine kontinuierliche Drehung des Rotors hervorruft. Drehmoment: Das Drehmoment gibt an, welches maximale Moment der Motor bei unterschiedlichen Drehzahlen abgibt. Meist liegen diese Angaben in Form von Kennlinien vor. Wicklungswiderstand: Anhaltspunkt zur Berechnung der ohmschen Verluste im Motor. Dieser Wert hat ggf. Auswirkungen auf die Auslegung der Ansteuerung (Vorwiderstände etc.) Wicklungsinduktivität: Diese Angabe hat Bedeutung bei der Wahl der Betriebsspannung, da sie die Geschwindigkeit des Stromauf- und -abbaus mitbestimmt und damit die dynamischen Eigenschaften beeinflusst. Nennspannung: Die Nennspannung besagt, welche Spannung im stationären Fall an den Motor zu legen ist, um den Phasenstromnennwert zu erreichen. Sie ist bei Konstantstrom-Ansteuerung nicht mit der Betriebsspannung zu verwechseln. Rotorträgheitsmoment: Das Rotorträgheitsmoment addiert sich zum Trägheitsmoment der Last und begrenzt damit die maximal mögliche Beschleunigung. Man benötigt diese Angabe zum Berechnen eines Antriebs. Motortemperatur, Wicklungstemperatur: Diese meist auf einen definierten Punkt am Motorgehäuse bezogene Temperatur darf während des Betriebes nicht überschritten werden, da ansonsten irreversible Schäden entstehen können. Mechanische Maße, Gewicht, Wellenbelastung: Zum mechanischen Ein- und Anbau von Motor und Last sind diese Angaben mit zu berücksichtigen. Oft findet man auch Angaben über Schutzart, Isolationseigenschaften etc, welche bei speziellen Umgebungsbedingungen oder anderen Randbedingungen zu berücksichtigen sind. Kenngrößen eines Schrittmotors
 Einphasige Motoren haben in der klassischen Antriebstechnik eine geringe Bedeutung. Die größte Verbreitung hat der 2-Phasenmotor mit seinen Varianten gefunden. Ein 4-Phasen Schrittmotor ist im Grunde ein 2-Phasenmotor mit getrennt herausgeführten Wicklungsanschlüssen. 5-Phasen Schrittmotoren bieten ein wesentlich besseres Laufverhalten und eine von Natur aus höhere Schrittauflösung. Schrittwinkel: Er besagt, welcher Drehwinkel mit dem Motor ohne elektronische Zusatzmaßnahmen aufzulösen ist. Die Angabe der Schrittzahl pro Umdrehung besagt sinngemäß dasselbe. Datenblattwerte beziehen sich auf Voll- oder Halbschritt. Phasenstrom: Auf diesen Wert bezieht sich das Nennmoment des Motors. Mit diesem Strom kann der Motor i. allg. auch dauernd betrieben werden, ohne dass er zu heiß wird. Haltemoment: Das Haltemoment gibt an, welches Moment der Motor im Stillstand halten kann, ohne dass dieses eine kontinuierliche Drehung des Rotors hervorruft. Drehmoment: Das Drehmoment gibt an, welches maximale Moment der Motor bei unterschiedlichen Drehzahlen abgibt. Meist liegen diese Angaben in Form von Kennlinien vor. Wicklungswiderstand: Anhaltspunkt zur Berechnung der ohmschen Verluste im Motor. Dieser Wert hat ggf. Auswirkungen auf die Auslegung der Ansteuerung (Vorwiderstände etc.) Wicklungsinduktivität: Diese Angabe hat Bedeutung bei der Wahl der Betriebsspannung, da sie die Geschwindigkeit des Stromauf- und -abbaus mitbestimmt und damit die dynamischen Eigenschaften beeinflusst. Nennspannung: Die Nennspannung besagt, welche Spannung im stationären Fall an den Motor zu legen ist, um den Phasenstromnennwert zu erreichen. Sie ist bei Konstantstrom-Ansteuerung nicht mit der Betriebsspannung zu verwechseln. Rotorträgheitsmoment: Das Rotorträgheitsmoment addiert sich zum Trägheitsmoment der Last und begrenzt damit die maximal mögliche Beschleunigung. Man benötigt diese Angabe zum Berechnen eines Antriebs. Motortemperatur, Wicklungstemperatur: Diese meist auf einen definierten Punkt am Motorgehäuse bezogene Temperatur darf während des Betriebes nicht überschritten werden, da ansonsten irreversible Schäden entstehen können. Mechanische Maße, Gewicht, Wellenbelastung: Zum mechanischen Ein- und Anbau von Motor und Last sind diese Angaben mit zu berücksichtigen. Oft findet man auch Angaben über Schutzart, Isolationseigenschaften etc, welche bei speziellen Umgebungsbedingungen oder anderen Randbedingungen zu berücksichtigen sind. Kenngrößen eines Schrittmotors")
12
Motoren Schrittmotor Verkleinerung der Schrittweite durch unterschiedliche elektrische Ansteuerung der Stränge Zwei Strang- 0° 45° 90° 135° 180° 225° 270° bipolar Anst Pos1 Pos2 Pos3 Pos4 Pos5 Pos6 usw. Strom I1 √2 1 -1 -√2 Strom I2 Die einzelnen Stränge müssen nicht nacheinander bestromt werden, es können gleichzeitig auch mehrere aktiv sein. Der Rotor stellt sich dann auf die Richtung des aus zwei, drei oder mehr Wicklungen resultierenden magnetischen Feldes ein. Die Wicklungen müssen natürlich nicht immer sekrecht zueinander stehen, wie bei zwei Strängen, sie können auch unter 60° (bei drei Wicklungen) usw. zueinander liegen. Einige Beispiele folgen.
 usw. zueinander liegen. Einige Beispiele folgen")
13
Motoren Ansteuerung von Fünf Strängen

14
Motoren Ansteuerung von Fünf Strängen

15
Motoren Ansteuerung Wenn wir diese Logik fortsetzen, dann könnten wir sehr viele Strangwicklungen einbauen, oder die Stränge mit ganz unterschiedlichen, fein abgestuften Strömen beaufschlagen. Letzteres heißt auch Mini- oder Mikroschrittbetrieb. Das Stromnetz bietet uns bereits drei Phasen an, die um 120° versetzt kommen. Legt man jede Phase auf einen der drei Strangspulen, so erhält man ein umlaufendes Magnetfeld mit 50 Hz, das man gar nicht mehr durch einzelne Schritte gleichstrommäßig beschalten muss, sondern direkt aus dem Drehstromnetz versorgen kann.

16
Motoren Ansteuerungsarten unipolar bipolar
Wicklung W1 und W2 sind jeweils die Hälfte einer Strang-Spule mit Mittelanzapfung. Schalter S1 erzeugt Nord-Süd Ausrichtung und Schalter S2 eine Süd-Nord Ausrichtung. Schalter sind Halbleiter z.B.: Transistoren, Thyristoren, Diese werden von Logik-Bausteinen angesteuert. Wicklung W1 und W2 sind getrennte Spulen Die Schalter S1-S3 erzeugen Nord-Süd Ausrichtung und Schalter S1-S4 erzeugen Süd-Nord an der Spule W1. Entsprechend auch bei Wicklung W2.

17
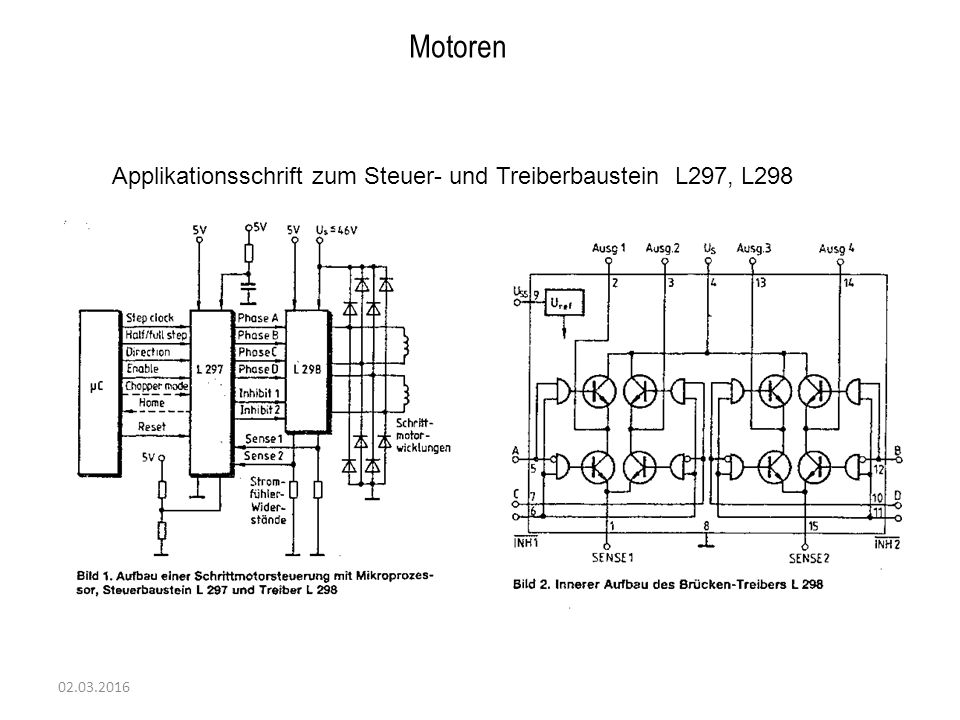
Motoren Applikationsschrift zum Steuer- und Treiberbaustein L297, L298
18
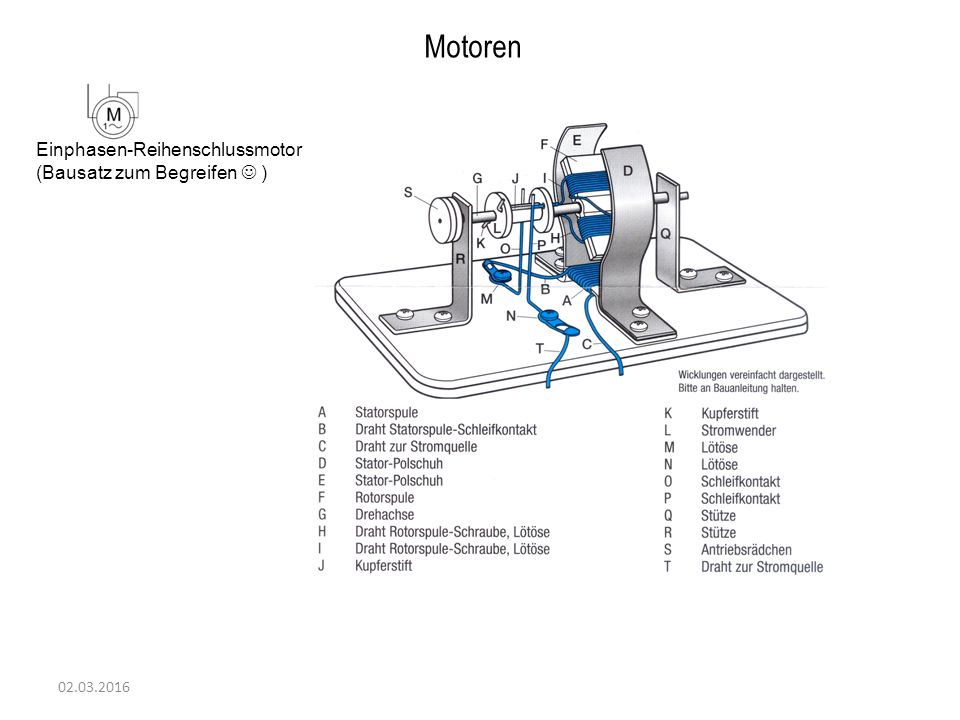
Motoren Einphasen-Reihenschlussmotor (Bausatz zum Begreifen )
Ähnliche Präsentationen



















