Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Elektronisch messen, steuern, regeln
Aktuatoren: Mechanische Antriebe Motoren

2
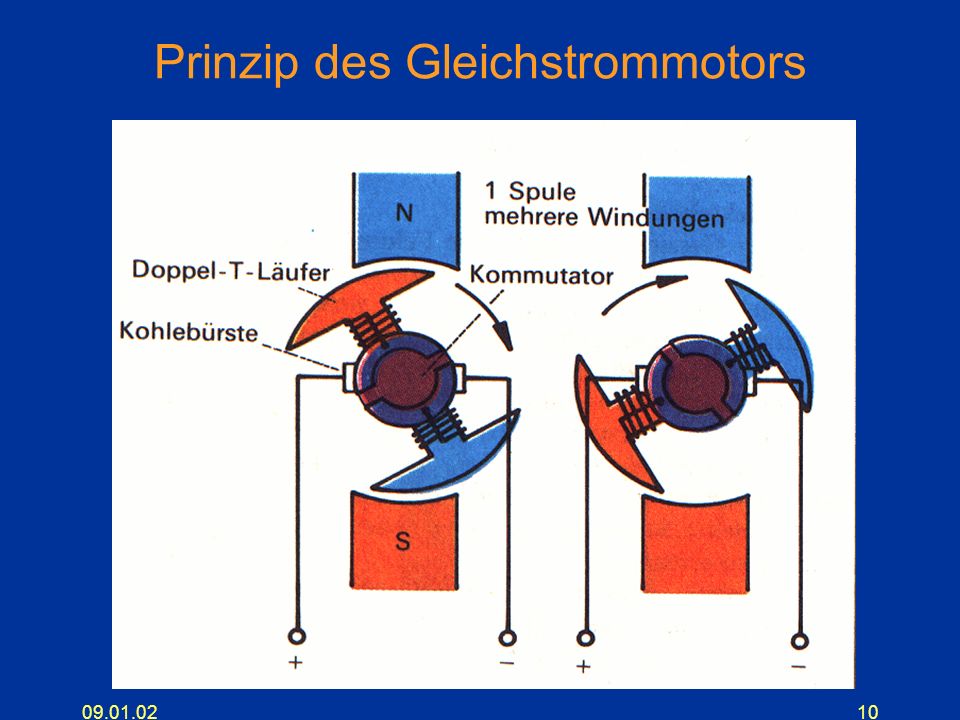
Magnetische Kräfte Die Lorentz-Kraft auf einen stromdurchflossenen Leiter im Magnetfeld wird: (L = Leiterlänge, I = Strom, B = Stärke des Magnetfeldes)
")
3
Magnetische Kräfte 2 Auf ferromagnetische Teile werden im inhomogenen Magnetfeld eines Permanent- oder eines Elektro-Magneten Kräfte ausgeübt. Werden diese Teile durch die Kräfte bewegt, so kann das Magnetfeld durch kleineren magnetischen Widerstand selbst auch noch verstärkt werden.

4
Relais Wird die Kupferwicklung von einem Strom durchflossen, so wird die Eisenwippe an den Kern gezogen. Durch den geringeren Luftspalt wird das Magnetfeld zusätzlich noch grösser. Beim Ausschalten lässt die Federkraft der mittleren Kontaktlamelle die Wippe wieder in die Ruhestellung zurückfallen.

5
Zugmagnete Wird die Kupferwicklung von einem Strom durchflossen, so wird die Eisenscheibe an den Kern gezogen. Durch den geringeren Luftspalt wird das Magnetfeld zusätzlich noch grösser. Beim Ausschalten lässt die Federkraft die Scheibe wieder in die Ruhestellung zurückfallen.

6
Ventile

7
Ansteuerung Um die relativ hohen Ströme (bis 1A) schalten zu können, verwendet man Schalttransistoren. Beim Ausschalten möchte die Induktivität der Spule den Strom erhalten. Durch Selbstinduktion würden am Kollektor des Transistors so hohe Spannungen entstehen, dass der Transistor zerstört würde. Die Freischaltdiode verhindert die Zerstörung des Transistors

8
Kompensationswaage Beim Lautsprecher wird die Spule im Magnetfeld von Wechselströmen durchflossen und damit die Membrane bewegt. Bei der Kompensationswaage wird nach Auflegen des Gewichtes ein Gleichstrom durch die Spule im Magnetfeld solange erhöht, bis sich der Waagenteller wieder an genau derselben Position befindet, wie ohne aufgelegtes Gewicht. Der Strom ist dann genau proportional zur Gewichtskraft.

9
Gleichstrom-Motor

10
Prinzip des Gleichstrommotors
11
Gleichstrom-Motoren

12
Bürstenlose Motoren

13
Planetengetriebe

14
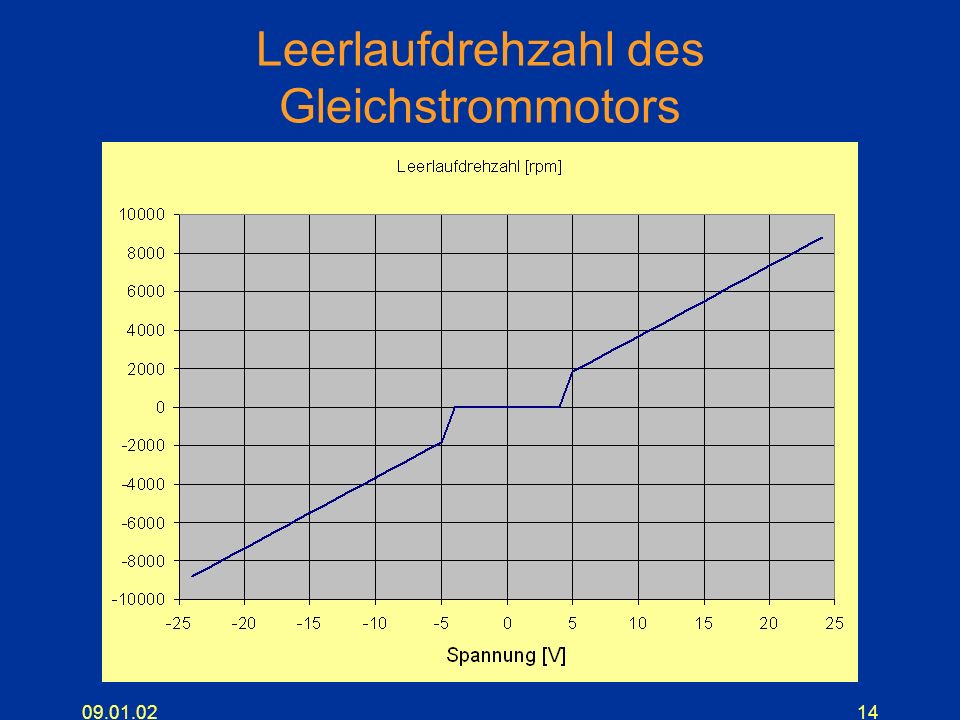
Leerlaufdrehzahl des Gleichstrommotors
15
Belastungs-Charakteristik des Gleichstrommotors

16
Schritt-Motor

17
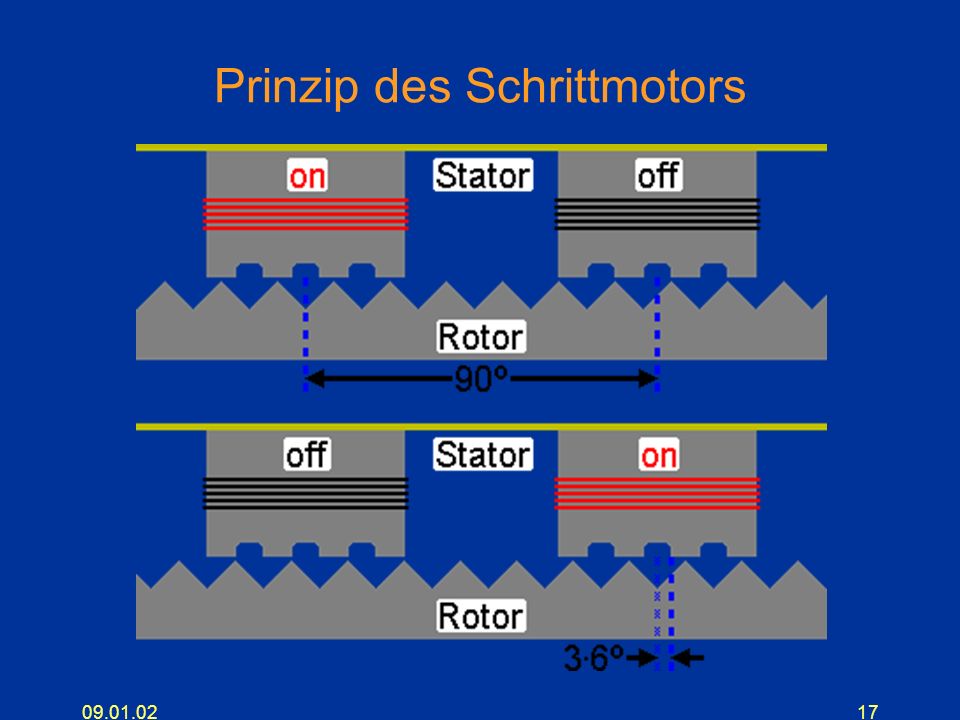
Prinzip des Schrittmotors
18
Schrittmotoren Permanentmagnet S N

19
Ansteuerung Die beiden Spulen des Schrittmotors können mit beliebigen Sequenzen mit Strom versorgt werden. Bewegungsrichtung und Zeitpunkt des nächsten Schrittes können beliebig gewählt werden. Dadurch lassen sich absolute Winkelpositionen kontrollieren!

20
Ansteuerung 2 Die beiden UND-Tore sind eingefügt, dass die Schalter A und B (oder C und D) nicht gleichzeitig eingeschaltet werden können. Sie verhindern einen Kurzschluss zwischen +Speisung und 0V. Die Schalter sind mit Transistoren realisiert, meist kommen Leistungs-Metall-Oxyd-Semiconductor-Feldeffekt-Transistoren (PowerMOSFET) zur Anwendung.
 nicht gleichzeitig eingeschaltet werden können. Sie verhindern einen Kurzschluss zwischen +Speisung und 0V. Die Schalter sind mit Transistoren realisiert, meist kommen Leistungs-Metall-Oxyd-Semiconductor-Feldeffekt-Transistoren (PowerMOSFET) zur Anwendung")
21
Piezo-elektrische Antriebe
22
Piezo-elektrischer Effekt
Ferroelektrische Materialien z.B. BaTiO3, Bleizirkonat, Bleititanat sind ohne Polarisation isotrop. Durch die Polarisation (= erwärmen, abkühlen mit angelegtem el.Feld unter die Curie-Temperatur) wird das Material anisotrop und piezo-elektrisch.
 wird das Material anisotrop und piezo-elektrisch")
23
Einfache piezo-elektrische Aktuatoren
Wird das elektrische Feld parallel zur Polariation angelegt, so wird deren Wirkung noch verstärkt, der Stab wird länger und dünner. Wird das elektrische Feld antiparallel zur Polariation angelegt, so wird deren Wirkung noch vermindert, der Stab wird kürzer und dicker.

24
Piezostacks

25
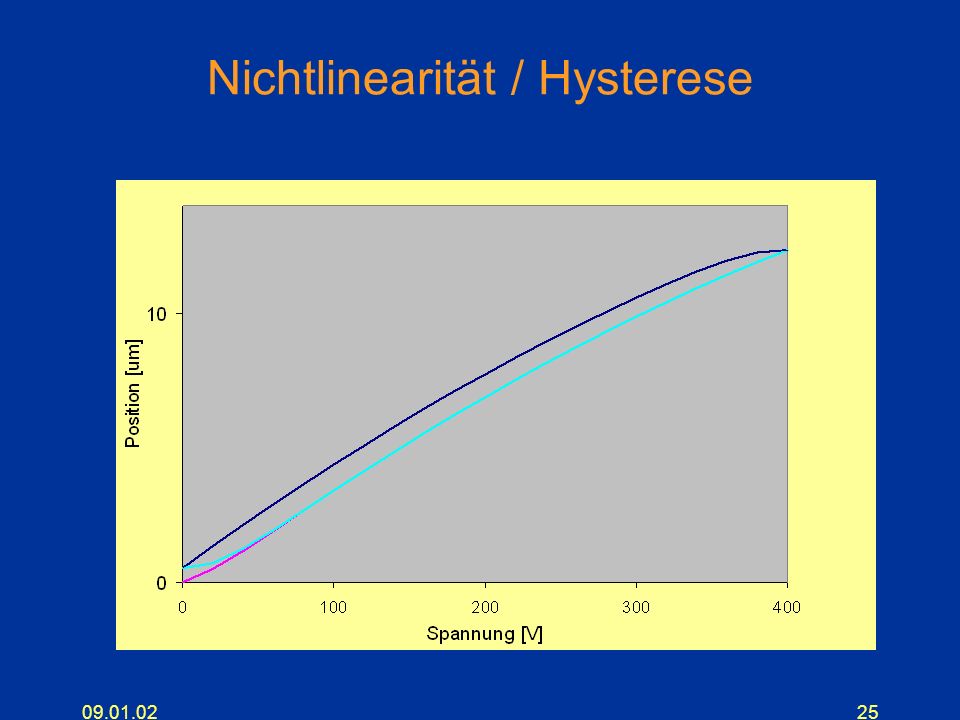
Nichtlinearität / Hysterese
26
Bimorph Piezo‘s Bimorphe Piezo-Aktuatoren bestehen aus zwei Schichten mit entgegengesetzter Polarisation. Beim Anlegen einer Spannung dehnt sich eine Schicht aus, die andere zieht sich zusammen. Damit verbiegt sich der Piezo. Mit der Verbiegung des Piezo können relativ grosse Auslenkungen erreicht werden.

27
Piezo-Röhrchen Wird der Piezo als Röhrchen geformt und die äussere Metall-Elektrode in 4 Segmente unterteilt, so lassen sich Bewegungen in 3 orthogonalen Richtungen ausführen. Die innere Elektrode sei 0V. Bei gleicher Spannung auf allen Segmenten kann die Länge des Röhrchens verändert werden. Werden an gegenüberliegenden Elektroden Spannungen gleicher Grösse, aber umgekehrtem Vorzeichen angelegt, so verbiegt sich das Röhrchen in dieser Richtung (analog zum Bimorph).
")
28
Z-Bewegung

29
X-Bewegung

30
Y-Bewegung

31
Trägheitsmotor Die vier Bimorph-Piezo‘s werden durch die angelegte Spannung gebogen. Die Masse wird mit dem Anwachsen der Spannung linear nach rechts bewegt. Beim Zurückspringen der sägezahnförmigen Spannung kann die träge Masse der plötzlichen Bewegung nicht folgen.

32
Drehstrom Asynchron-Motor
Wenn der Rotor gleich schnell dreht wie das rotierende Magnetfeld konstanter Amplitude, kann nichts mehr induziert werden, deshalb stellt sich die Drehzahl des Rotor leicht tiefer ein als diejenige des Feldes.

Ähnliche Präsentationen











mobile Informations- Systeme in einer Heterogenen Netzwerkumgebung Oliver R. Achtelik.>")







