Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Eingebettete Systeme Qualität und Produktivität
Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für Rechnerarchitektur und Softwaretechnik

2
War wir bislang hatten Einführungsbeispiel (Mars Polar Lander)
Automotive Software Engineering Domänen-Engineering Modellbasierte Entwicklung Anforderungsdefinition und -artefakte Lastenheft TSG Ziele und Szenarien Strategien Modellierung physikalische Modellierung Anwendungs- und Verhaltensmodellierung Berechnungsmodelle, zeitabhängige & hybride Automaten Datenflussmodelle (Katze und Maus) Regelungstechnik PID-Regelung heute: HW für Regelungsaufgaben
 Regelungstechnik. PID-Regelung. heute: HW für Regelungsaufgaben")
3
PID-Regler Proportionaler, integraler und differentialer Anteil bei der Regelung u(t) = k1*e(t) + k2*e(t) dt + k3*e(t) Ziel: Vermeidung bzw. Dämpfung von Überschwingungen P(proportionaler) Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein“ I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden“ D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen“ Einstellen des Reglers erst den proportionalen Anteil einstellen, erhöhen bis leichte Oszillation auftritt dann integralen Teil hoch regeln, solange bis die Oszillation aufhört dann differentiellen Anteil, damit Zielgerade möglichst schnell erreicht wird
 Anteil: „Je größer die Regelabweichung, umso größer muß die Stellgröße sein I(integraler) Anteil: „Solange eine Regelabweichung vorliegt, muß die Stellgröße verändert werden D(differentieller) Anteil: „Je stärker sich die Regelabweichung verändert, umso stärker muß die Regelung eingreifen Einstellen des Reglers. erst den proportionalen Anteil einstellen, erhöhen bis leichte Oszillation auftritt. dann integralen Teil hoch regeln, solange bis die Oszillation aufhört. dann differentiellen Anteil, damit Zielgerade möglichst schnell erreicht wird")
4
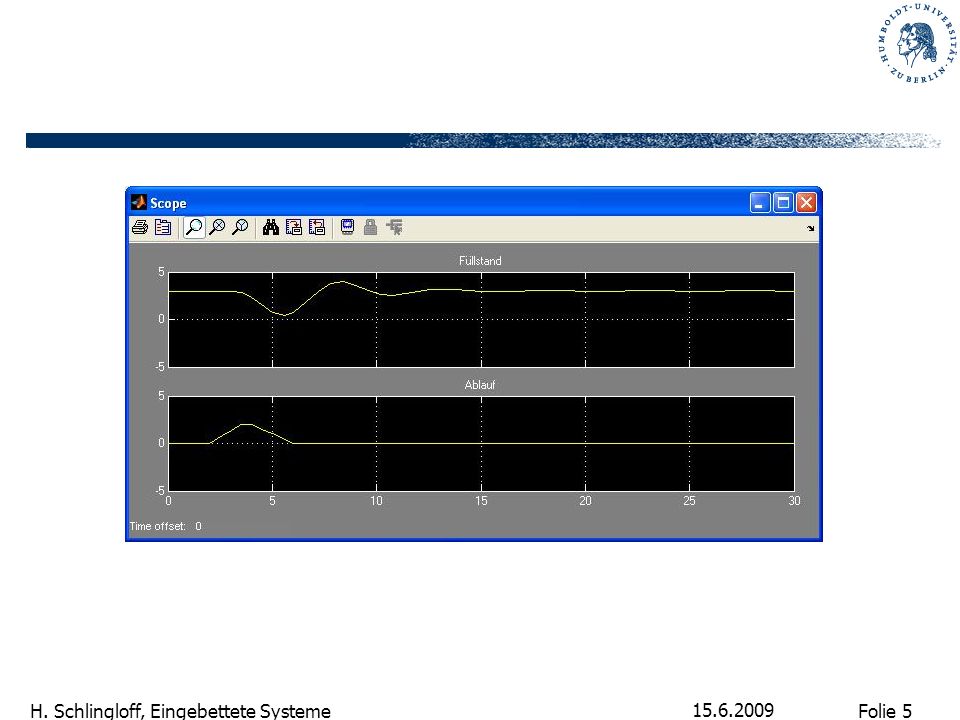
Beispiel Wasserstandsregelung
Wer hat‘s gemacht?

6
Deployment Wie realisiert man elektrische / elektronische / elektronisch programmierbare Regler? welche Hardware, Software? welche Peripherie (Sensorik, Aktuatorik?) wie kommt die SW auf die HW? Übung mit Lego- und Fischertechnik-Systemen
 wie kommt die SW auf die HW Übung mit Lego- und Fischertechnik-Systemen")
7
Eingebettete Systeme: Hardware
Spezielle Prozessoren 4-bitter, minimale Kosten, energieoptimiert keine MMU, Coprozessoren, FloatingPoint Microcontroller mit zusätzlichen Steuerungsleitungen Spezialprozessoren (DSP, SoC, Krypto) Trend: FPGAs Spezielle Speicher meist bewegungslos (keine magnetischen/optischen Medien) ROM, PROM, EEPROM; zunehmend: Flash Disks minimaler RAM, auch; dual ported RAM Zusatzhardware Spezielle Platinen, AD/DA-Wandler, ASICs einsatzspezifische Sensoren und Aktuatoren Einfache Kommunikationsbusse und –netze CAN, Feldbusse; zunehmend auch Ethernet, Bluetooth etc.
 Trend: FPGAs. Spezielle Speicher. meist bewegungslos (keine magnetischen/optischen Medien) ROM, PROM, EEPROM; zunehmend: Flash Disks. minimaler RAM, auch; dual ported RAM. Zusatzhardware. Spezielle Platinen, AD/DA-Wandler, ASICs. einsatzspezifische Sensoren und Aktuatoren. Einfache Kommunikationsbusse und –netze. CAN, Feldbusse; zunehmend auch Ethernet, Bluetooth etc")
8
Eingebettete Systeme: Aufbau
Applikationsschicht Steuerungsalgorithmus Benutzungsschnittstelle Realzeit-Betriebssystem Middleware Hardware Sensorik, Aktuatorik Netzverbindung Prozessankopplung (Funk-) Netzwerk
 Netzwerk")
9
Beispiel: Lego RCX Robotic Command Explorer (1998)
„Programmable Brick“ ursprüngliches Design: S. Papert, MIT Media Lab Vorläufer: Code Pilot, Cybermaster, Scout wie programmieren? Nachfolger: NXT (2006) Hitachi Single-Chip-Mikrocontroller Display, 4 Knöpfe, Batteriefach 3 analoge Eingänge, 3 analoge Ausgänge IR-Kommunikation (seriell)
 Hitachi Single-Chip-Mikrocontroller. Display, 4 Knöpfe, Batteriefach. 3 analoge Eingänge, 3 analoge Ausgänge. IR-Kommunikation (seriell)")
10
Renesas H8/3297-3292 Microcontroller
H8/300-CPU 16 KB ROM 0,5 KB (!) RAM 8 E/A-ports (8-Bit), SCI 16 Register (8-Bit) max. 16 MHz Takt Timer, A/D-Wandler etc. “disencouraged”
 RAM. 8 E/A-ports (8-Bit), SCI. 16 Register (8-Bit) max. 16 MHz Takt. Timer, A/D-Wandler etc. disencouraged cnt=product_folder.jsp&fp=/products/mpumcu/h8_family/h8300_series/h83297_group")
11
EA-Ports Sensoreingänge Motorausgänge
Spannungsmessung, 100=Kurzschluss, 0=kein Kontakt Über U=R.I lässt sich Widerstand messen Schalter, Temperatursensor (passiv) Lichtsensor, Drehsensor (aktiv) 3 ms Batteriespannung, 0.1 ms Sensorwert Motorausgänge Leistungssteuerung über Pulsweitenmodulation Verschaltungssicher Motoren, Lämpchen
 Lichtsensor, Drehsensor (aktiv) 3 ms Batteriespannung, 0.1 ms Sensorwert. Motorausgänge. Leistungssteuerung über Pulsweitenmodulation. Verschaltungssicher. Motoren, Lämpchen")
12
NXT Lego „Technik“ Serie Atmel 32-Bit-ARM-Prozessor
AT91SAM7S256; 256 kB Flash-Speicher, 64 KB RAM, 48 MHz Koprozessor: Atmel 8-Bit AVR, ATmega48; 4 KB Flash-Speicher, 512 Byte RAM, 8 MHz digitale Sensoren (Ultraschall, Spezialsensoren), 4 Stecker I2C-Bus digital/analog-Kabel mit Spezialstecker Motoren mit Drehwinkelsensor Bluetooth-Kommunikation, USB-Anschluss Punktmatrix-Display, 8-bit Sound Firmware mit Dateisystem
, 4 Stecker. I2C-Bus. digital/analog-Kabel mit Spezialstecker. Motoren mit Drehwinkelsensor. Bluetooth-Kommunikation, USB-Anschluss. Punktmatrix-Display, 8-bit Sound. Firmware mit Dateisystem")
13
FT 30402 Atmel 8-bit Prozessor TS80, 32kB RAM
vier umpolbare Anschlüsse für Motoren, acht digitale Eingänge, zwei Analogeingänge Programmierung über seriellen Port technische Funktionsmodelle Lucky-Logic für Windows (LLWin)
")
14
Atmel RN-mega 2560 ATmega AVR® 8-Bit Microcontroller
RISC Architecture, up to 16 MIPS Throughput at 16 MHz, On-Chip 2-cycle Multiplier 100 pin 256 K Flash 8K RAM, 4K EEPROM Timer, PWM-Kanäle 16 analoge Eingänge, 86 programmierbare I/O Leitungen vier TTL UARTS (RX/TX) RS232, USB, I2C, SPI-Bus …
 RS232, USB, I2C, SPI-Bus. …")
15
Aufgabe Abstandsregelung Verfügbare HW einfacher P-Regler PID-Regelung
Lego RCX Lego NXT Fischertechnik

Ähnliche Präsentationen