Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Software-Engineering II Eingebettete Systeme, Softwarequalität, Projektmanagement
Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für Rechnerarchitektur und Softwaretechnik

2
Übersicht 1. Eingebettete Systeme Hinweise 1.1. Definitionen
1.2. Anforderungsanalyse 1.3. Modellierung 1.4. Architektur Hard- und Software-Aufbau Fehlertoleranz Echtzeitbetriebssysteme, Scheduling? Hardware/Software Codesign? Produktlinienentwicklung? 1.5. Automotive Software Engineering Hinweise Mi keine Vorlesung mehr! Mi ist normale Vorlesung Fr findet ebenfalls statt Mi , Fr MBEES (Vorlesung entfällt)
")
3
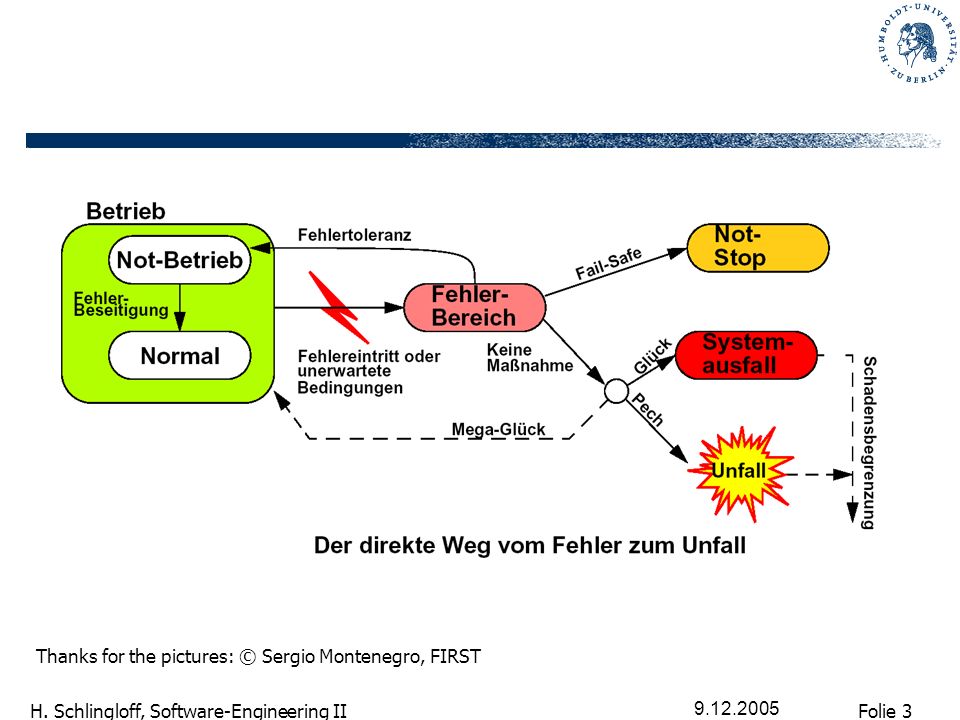
Thanks for the pictures: © Sergio Montenegro, FIRST
4
Redundanz und Fehlertoleranz
Redundanz: Das Vorhandensein mehrerer Möglichkeiten, um eine gegebene Funktion zu erbringen Strukturelle Redundanz Vervielfältigung von Komponenten baugleich oder alternative Entwürfe (Replikation / Diversität) Funktionale Redundanz zusätzliche, unterstützende Komponenten Test, Konfiguration, Sensoren Informationsredundanz Zusätzliche Informationen Prüfbits, zusätzliche Zeiger, Zähler Zeitliche Redundanz Zusätzliche Zeit für wiederholte Ausführungen (Retry)
 Funktionale Redundanz. zusätzliche, unterstützende Komponenten. Test, Konfiguration, Sensoren. Informationsredundanz. Zusätzliche Informationen. Prüfbits, zusätzliche Zeiger, Zähler. Zeitliche Redundanz. Zusätzliche Zeit für wiederholte Ausführungen (Retry)")
5
Fehlertoleranz Fehlertoleranz: Die Fähigkeit eines Systems, trotz aufgetretener Fehler die vorgesehene Funktion zu erbringen Ziel: Verringerung der Ausfallwahrscheinlichkeit durch Redundanz Komponentenausfälle müssen unabhängige Ereignisse sein („single faults“) Einzelne Komponente hat Ausfallwahrscheinlichkeit p; Gesamtausfallwahrscheinlichkeit? Notwendiger Replikationsgrad für geforderte Verfügbarkeit?
 Einzelne Komponente hat Ausfallwahrscheinlichkeit p; Gesamtausfallwahrscheinlichkeit Notwendiger Replikationsgrad für geforderte Verfügbarkeit")
6
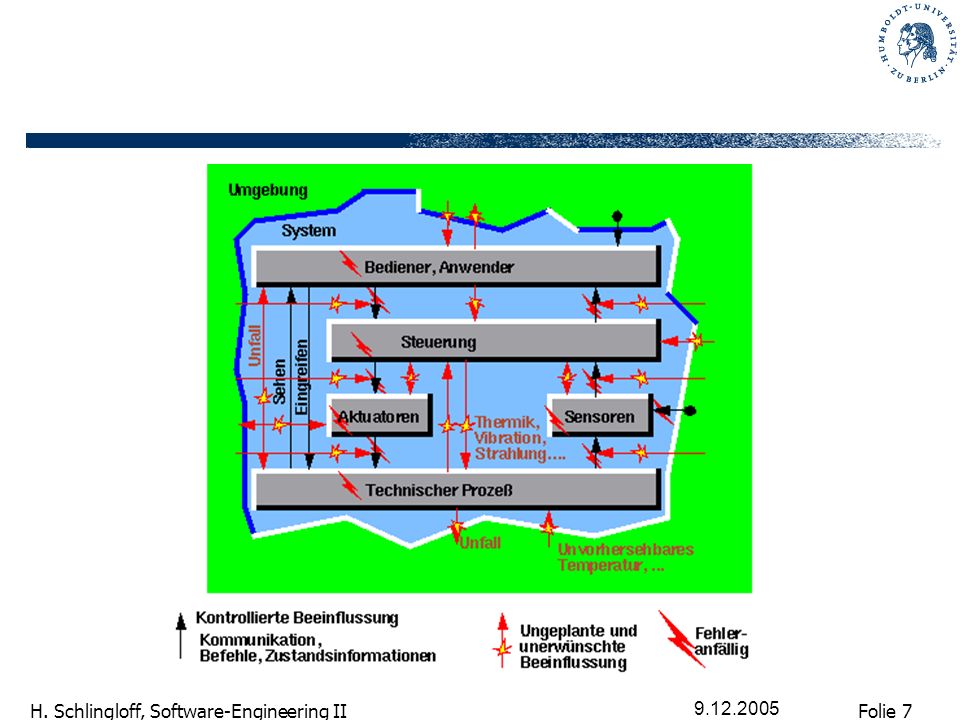
Warum Fehlertoleranz? Steuerungscomputer Aktuatoren Sensoren
Technischer Prozeß

8
Kenngrößen Zuverlässigkeit (reliability)
Grad der Fähigkeit einer Betrachtungseinheit, die geforderte Leistung während einer vorgegebenen Zeitspanne zu erbringen Wahrscheinlichkeit der Abwesenheit von Ausfällen über dem Beobachtungszeitraum gleichzusetzen mit Überlebenswahrscheinlichkeit R(t)=Wahrscheinlichkeit, dass das System im Zeitraum [0,t] fehlerfrei ist; oft R(t)=e-t Ausfallwahrscheinlichkeit F(t) = Wahrscheinlichkeit (mindestens) eines Ausfalls im Beobachtungszeitraum; F(t) = 1 - R(t) Verfügbarkeit (availability) Maß für die Wahrscheinlichkeit, dass die geforderte Leistung zu einem Zeitpunkt erbracht werden kann A(t) = Wahrscheinlichkeit, dass das System zum Zeitpunkt t intakt ist (MTBF/(MTBF+MTTR)) Verlässlichkeit (dependability) Maß für das gerechtfertigte Vertrauen in die Leistung eines Systems
=Wahrscheinlichkeit, dass das System im Zeitraum [0,t] fehlerfrei ist; oft R(t)=e-t. Ausfallwahrscheinlichkeit. F(t) = Wahrscheinlichkeit (mindestens) eines Ausfalls im Beobachtungszeitraum; F(t) = 1 - R(t) Verfügbarkeit (availability) Maß für die Wahrscheinlichkeit, dass die geforderte Leistung zu einem Zeitpunkt erbracht werden kann. A(t) = Wahrscheinlichkeit, dass das System zum Zeitpunkt t intakt ist (MTBF/(MTBF+MTTR)) Verlässlichkeit (dependability) Maß für das gerechtfertigte Vertrauen in die Leistung eines Systems")
9
Ausfallrate Ausfallrate: Wahrscheinlichkeit, dass sich ein Ausfall pro Zeiteinheit in einem Intervall [t,t+] ereignet, gegeben Ausfallfreiheit bis zu t F(t+)-F(t) / *R(t) Häufigkeit, mit der sich Ausfälle in einem Intervall ereignen Hazard-Rate: bedingte Ausfalldichte z(t) = f(t) / R(t) Grenzwert der Ausfallrate für kleine Intervalle Steuerung mit Control Loop: Wahrscheinlichkeit mindestens eines Versagens in n Läufen: 1-(1-p)n p: Wahrscheinlichkeit des Versagens in einem Programmlauf (1-p): Wahrscheinlichkeit des Nichtversagens (1-p)n: Wahrscheinlichkeit des Nichtversagens in n paarweise unabhängigen Läufen
-F(t) / *R(t) Häufigkeit, mit der sich Ausfälle in einem Intervall ereignen. Hazard-Rate: bedingte Ausfalldichte z(t) = f(t) / R(t) Grenzwert der Ausfallrate für kleine Intervalle. Steuerung mit Control Loop: Wahrscheinlichkeit mindestens eines Versagens in n Läufen: 1-(1-p)n. p: Wahrscheinlichkeit des Versagens in einem Programmlauf. (1-p): Wahrscheinlichkeit des Nichtversagens. (1-p)n: Wahrscheinlichkeit des Nichtversagens in n paarweise unabhängigen Läufen")
10
Techniken Erhöhung der Zuverlässigkeit durch Redundanz
identische Replikation oder diversitäre Entwicklung statische oder dynamische Redundanz Statische Redundanz Alle Ressourcen ständig im Betrieb Im Fehlerfall direktes Umschalten Dynamische Redundanz Stand-by, Aktivierung erst im Fehlerfall Ggf. Fremdnutzung der Ressource (kritisch!)
")
11
Fehlerarten SW-Fehler: diversitäre Entwicklung (teuer!)
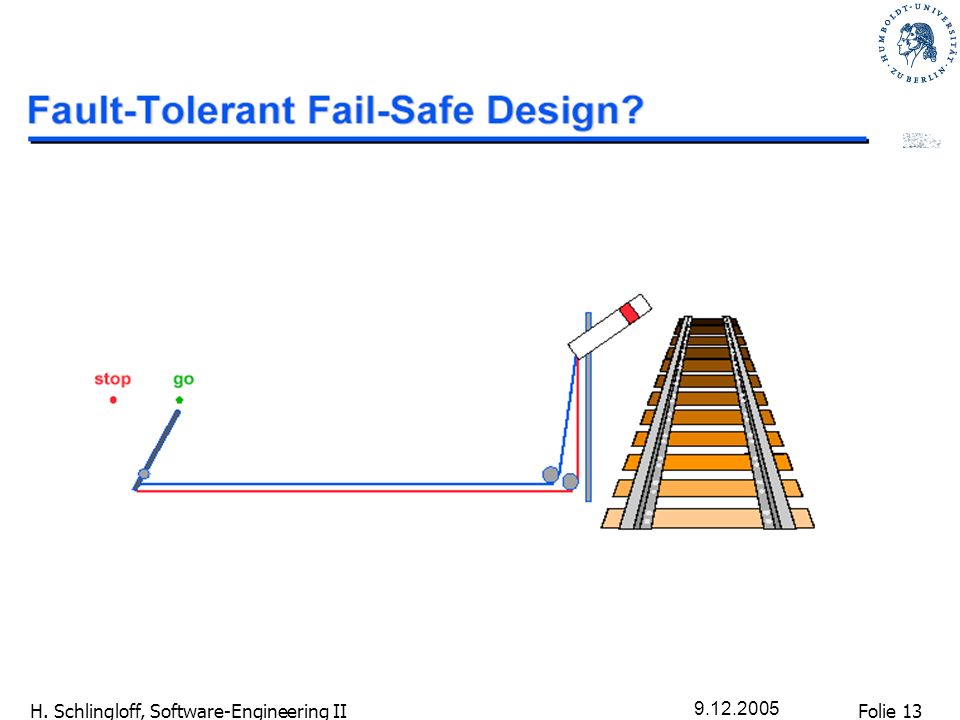
HW-Fehler, z.B. Speicher, Leitungen, Prozessoren… Byzantinische und nichtbyzantinische Fehler Fail-Operational, Fail-Soft, Fail-Stop

12
Was soll man duplizieren?
C A Parallel A B Seriell Ventilausfall auf: Wasser fliesst ab Ventilausfall zu: Ablauf blockiert sicher gegen einzelnen Ausfall

15
Triple Modular Redundancy (TMR)
Unabhängiges Voting Externe Komponente oder logisch getrennt Software-Voting: getrennte Speicher, geschütztes Betriebssystem 2-aus-3 Mehrheitsentscheid single fault fail operational, double fault fail silent (erster Ausfall kann toleriert, zweiter erkannt werden) bei 4-fach Replikation können byzantinische Fehler behoben werden
 bei 4-fach Replikation können byzantinische Fehler behoben werden")
16
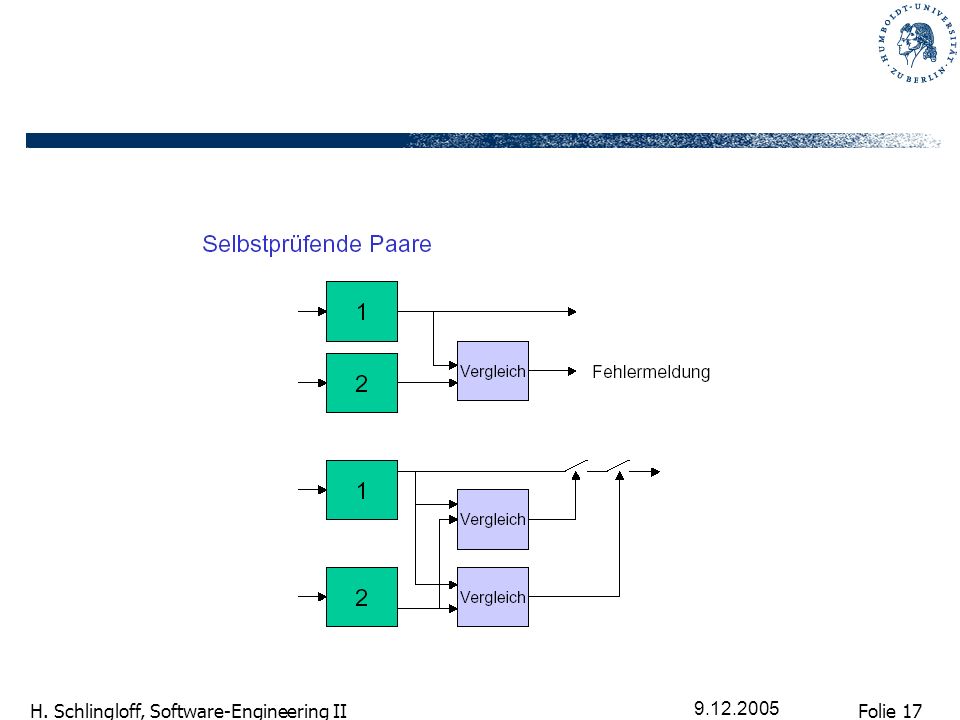
Verallgemeinerung

18
Dynamische Redundanz Vorteile Nachteile geringerer Ressourcenverbrauch
Möglichkeit der Nutzung der Reserven Nachteile Verzögerung beim Umschalten Standby-Komponenten

19
Aufgaben der FT-Komponenten
Fehlerdiagnose (Selbstdiagnose / Fremddiagnose) Ist ein Fehler aufgetreten? Welche Komponente ist fehlerhaft? Protokollierung Rekonfiguration Erbringung der Funktion mit den intakten Komponenten Umschalten bzw. Ausgliedern / Neustarten Recovery Reparatur bzw. Wiedereingliedern Rückwärts (Rollback, Recovery Points) Vorwärts (Wiederaufsatzpunkte)
 Ist ein Fehler aufgetreten Welche Komponente ist fehlerhaft Protokollierung. Rekonfiguration. Erbringung der Funktion mit den intakten Komponenten. Umschalten bzw. Ausgliedern / Neustarten. Recovery. Reparatur bzw. Wiedereingliedern. Rückwärts (Rollback, Recovery Points) Vorwärts (Wiederaufsatzpunkte)")
20
Stand der Praxis Sensorik, Aktuatorik Verkabelung, Bussysteme
z.B. Lenkwinkelgeber (Bosch), Bremsmotoren Verkabelung, Bussysteme z.B. TTP/C, FlexRay Controller, Hardware redundante integrierte modulare Controller (IMCs) Zukunftsmusik: fehlertolerante Prozessoren, SoC Software diversitäre Entwicklungen bislang nur für wenige Systeme bekannt (Fly-by-wire)
, Bremsmotoren. Verkabelung, Bussysteme. z.B. TTP/C, FlexRay. Controller, Hardware. redundante integrierte modulare Controller (IMCs) Zukunftsmusik: fehlertolerante Prozessoren, SoC. Software. diversitäre Entwicklungen bislang nur für wenige Systeme bekannt (Fly-by-wire)")
21
fehlertolerante Mehrprozessorarchitekturen
Lock-step versus loosely-synchronized Lock-step effizienter, loosely-synchronized sicherer Sicherung der Datenintegrität mittels CRC-Speicher Prototypen verfügbar, Serie nicht in Sicht Quelle: Baleani, Ferrari, Mangeruca, SangiovanniVincentell, Peri, Pezzini

22
Fehlerakkumulation

Ähnliche Präsentationen













>")
>")






