Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

4
Laufmaschine JOHNNIE Lehrstuhl für Angewandte Mechanik Fakultät für Maschinenwesen Technische Universität München Boltzmannstr. 15 D - 85748 Garching, GERMANY Gelenkpositionen und -geschwindigkeiten werden mit inkrementellen Winkelencodern gemessen.

7
Computer- navigiertes Operieren

8
Navigation ist die "Steuermannskunst" zu Wasser, zu Land, in der Luft und im Weltraum. Allgemeiner bezeichnet sie das sich Zurechtfinden in einem topographischen Raum, um einen gewünschten Ort zu erreichen

9
Nicht: Operieren nach Anweisung des Computers!! Sondern: Der erfahrene Operateur operiert nach seinem Können und überprüft mit dem Computer

10
CAOS C omputer A ssisted O rthopedic S urgery

11
Ziele Höhere Genauigkeit Besseres Operationsergebnis (Funktionalität) Weniger Komplikationen Niedrigere Revisionsrate „Minimal-invasive Operation“ Qualitätsdokumentation
 Weniger Komplikationen Niedrigere Revisionsrate „Minimal-invasive Operation Qualitätsdokumentation")
12
Robotik Caspar® ISS Robodoc® 1992 Erste OP 1994 Kommerzielle Vermarktung Keine FDA-Zulassung Hüfte und Knie- Implantate ISS Robodoc ortoMAQUET CASPAR

13
Navigation ist kein Operationsroboter

16
Navigation - Grundlagen Satelliten: Die Satelliten im All entsenden kontinuierlich ein Signal, anhand dessen die exakte Position kontinuierlich bestimmt werden kann. Das Navigationssystem im Auto enthält einen Detektor, der die Signale der Satelliten erfassen und aus diesen Daten die eigene aktuelle Position bestimmen kann.

17
Navigation - Grundlagen Beide Satelliten entsenden ein Signal dass von einem Detektor im Auto registriert wird. Je mehr Satelliten ihr Signal entsenden, desto genauer ist die Positionsbestimmung des Autos.

18
Navigation in der Medizin Positionserfassung eines chirurgischen Instruments oder Implantats und Darstellung relativ zur Patientenanatomie.

19
Was ist navigiertes Operieren? Operieren mit einem digitalisierten Meß- system

20
Warum Navigation? Um genauere und besser vorhersehbare Ergebnisse zu erreichen Dr.W.Baur Die Navigation erweitert meine Wahrnehmung!

21
3D Infrarot-Kamerasystem –NDI Polaris® Hybridkamera –Aktive (IR-Dioden) oder passive (reflektierende) Marker Mindestens 3 Marker
 oder passive (reflektierende) Marker Mindestens 3 Marker")
22
Navigation der HTO Setup des Orthopilot (Fa. Aesculap®) Dr.W.Baur
 Dr.W.Baur")
23
Bis zu 12% Reoperationen in den ersten 2 Jahren wegen Fehlstellung Auch bei erfahrenen Operateuren findet man Fehlpositionen > 3° geschätzt in 10% der Fälle

24
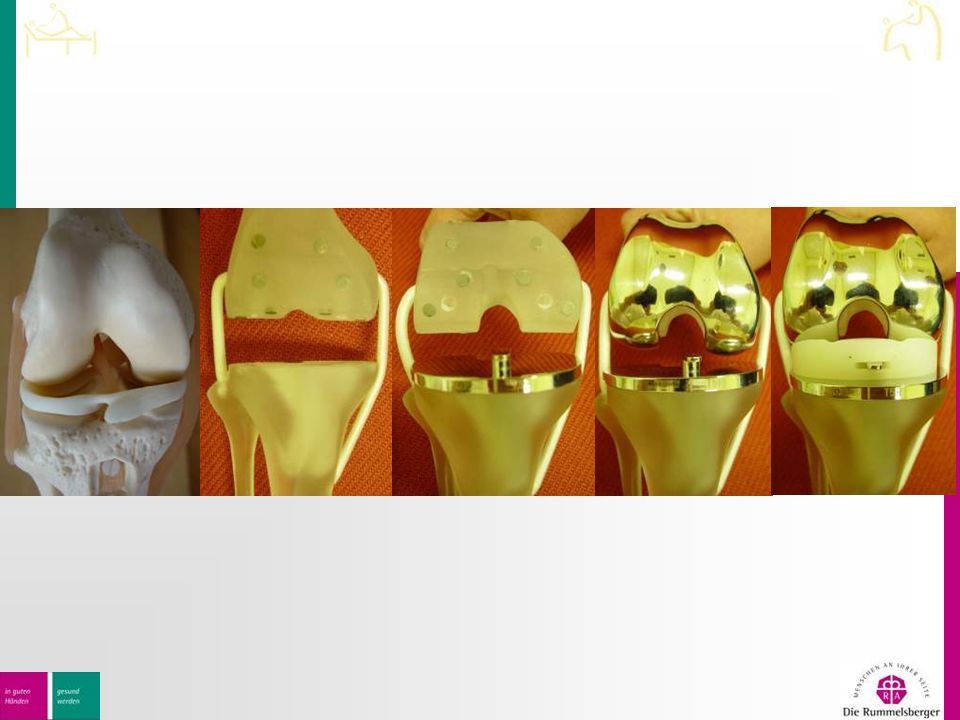
Was kann beim künstlichen Kniegelenk navigiert werden? Die Beinachse Die Implantatposition Die S pannung der Bänder

25
Bestimmen des Hüftzentrums

26
Bestimmen des Sprunggelenkszentrums

27
Bestimmen des Kniezentrums

28
Darstellen der Beinachse

30
Zubereitung am Schienbeinkopf

31
Zubereitung am Oberschenkel

32
Planung des Oberschenkelimplantates Gelenkspalt!

34
Äusseres Seitenband Inneres Seitenband

35
Navigierte Messung der Bandspannung

36
Position der Kniescheibe

38
Position der Kniescheibe!

40
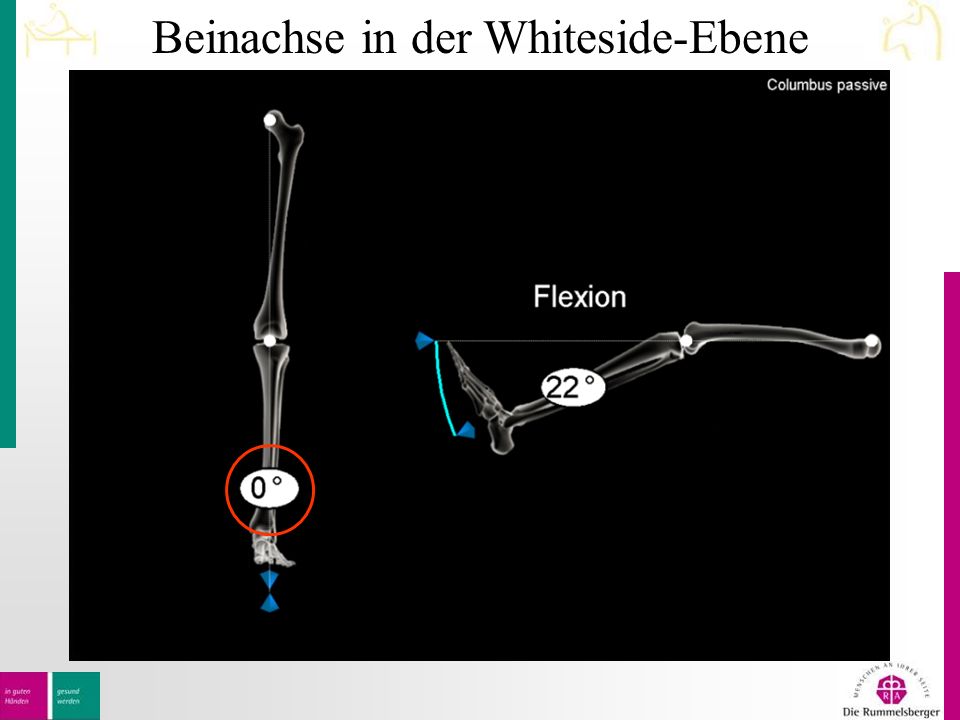
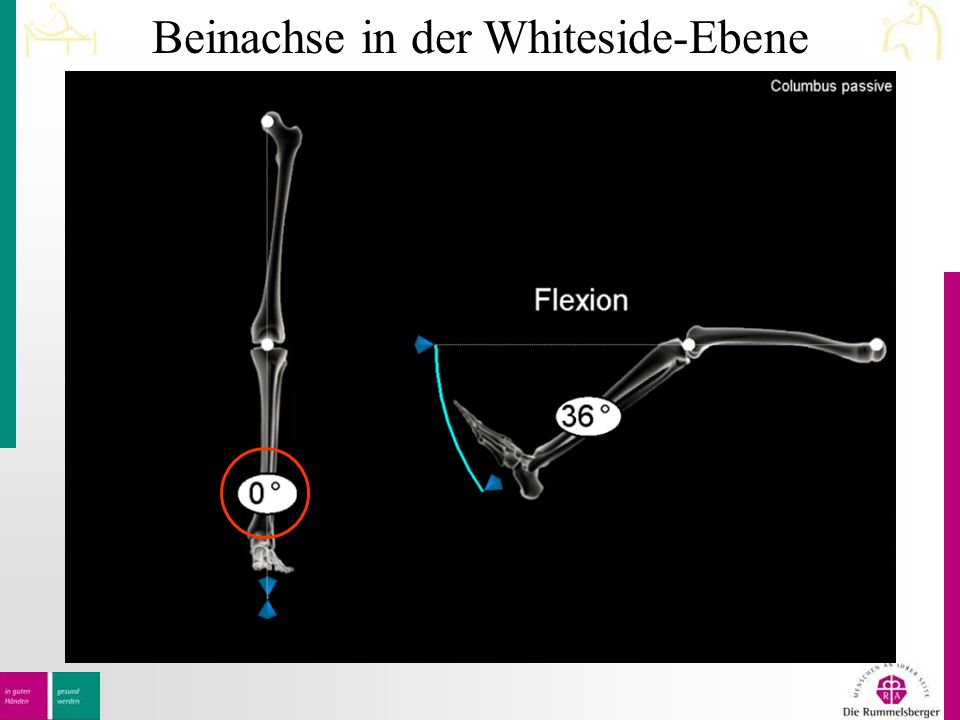
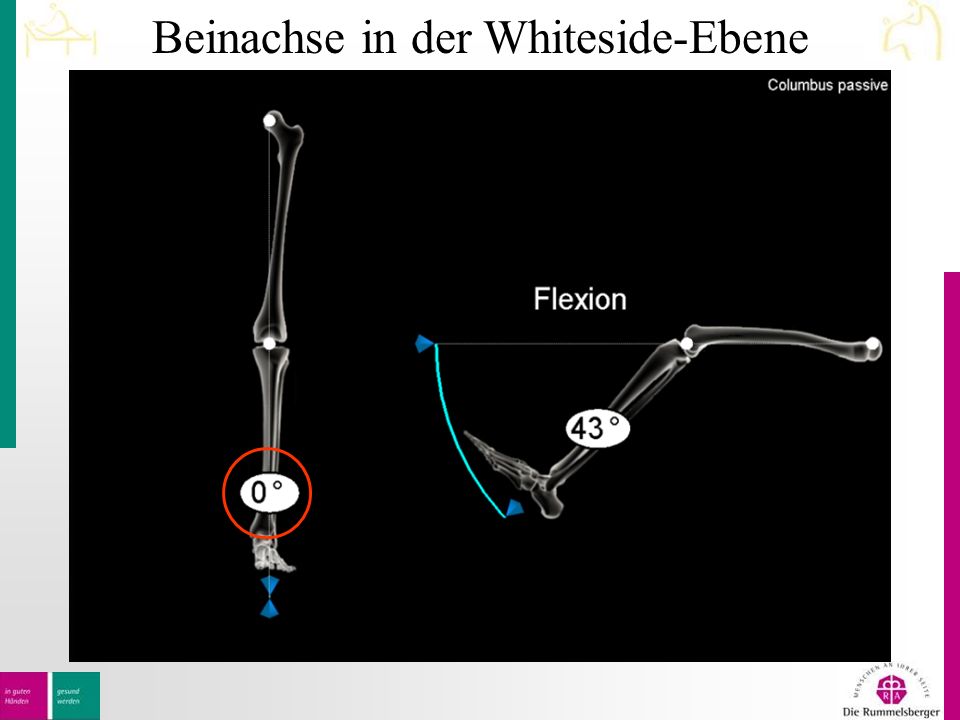
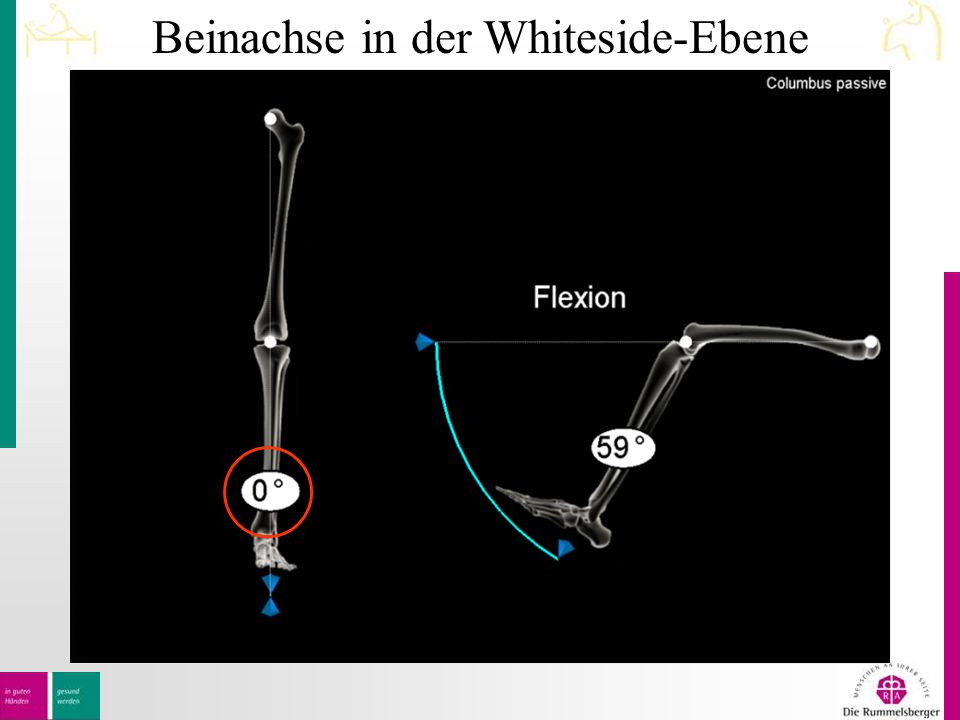
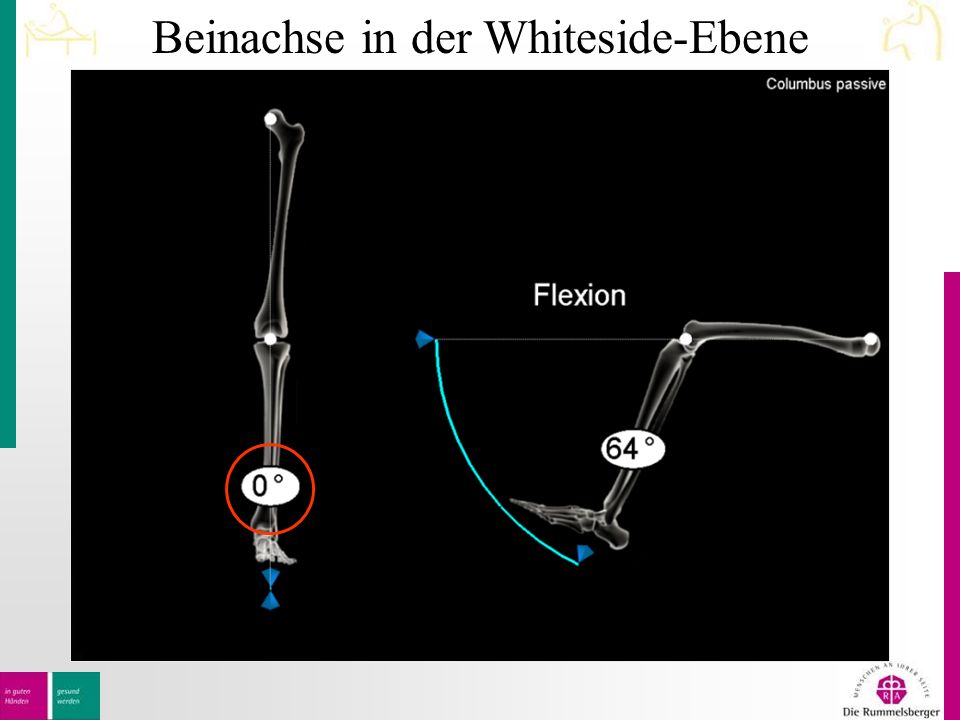
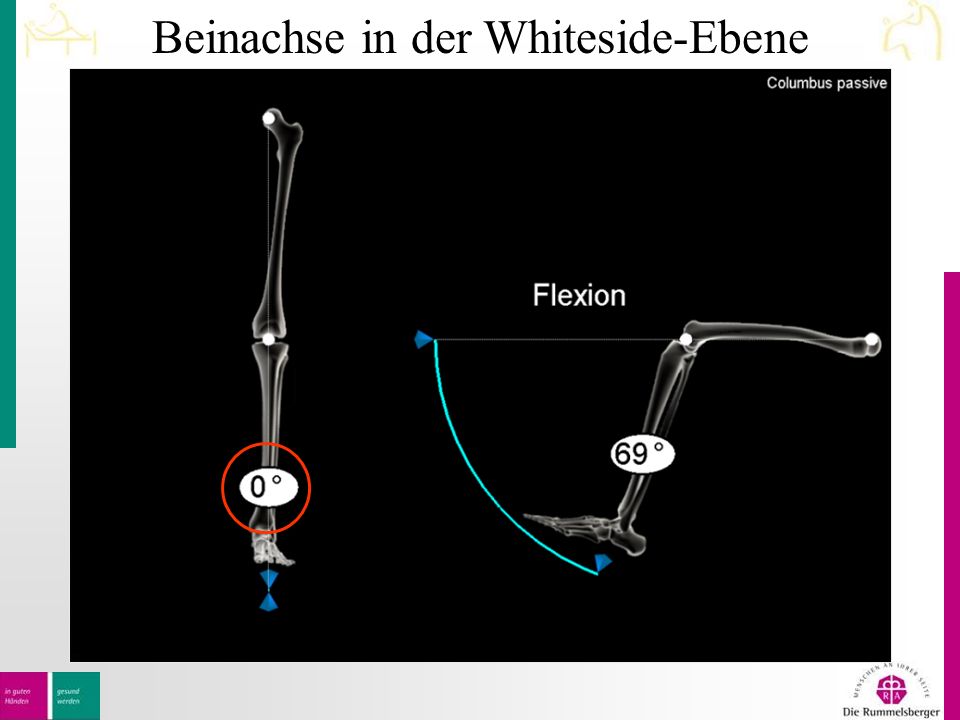
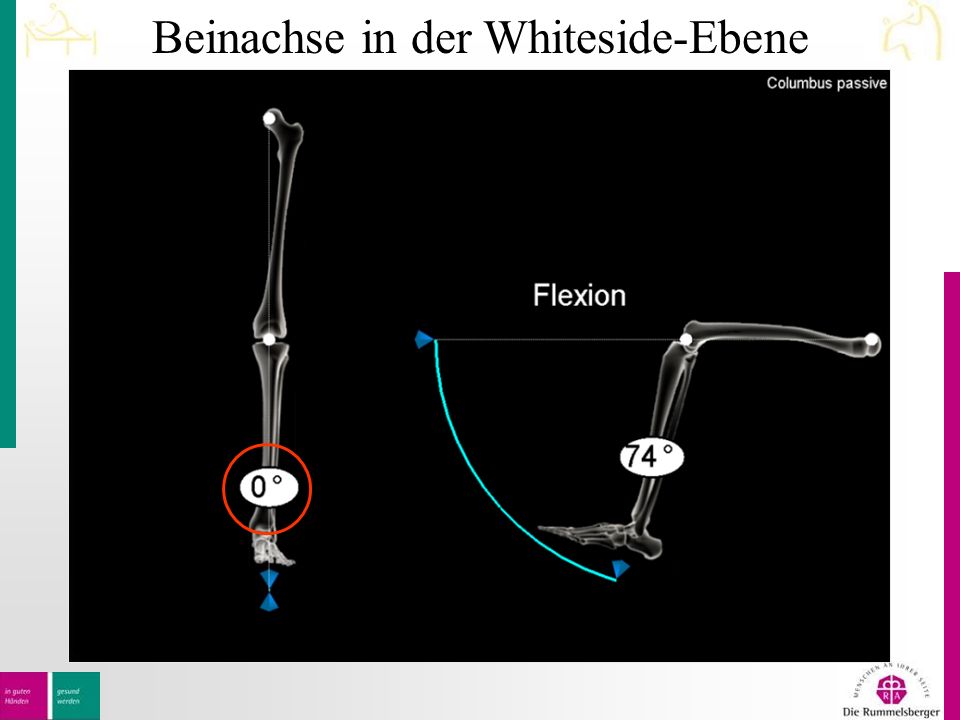
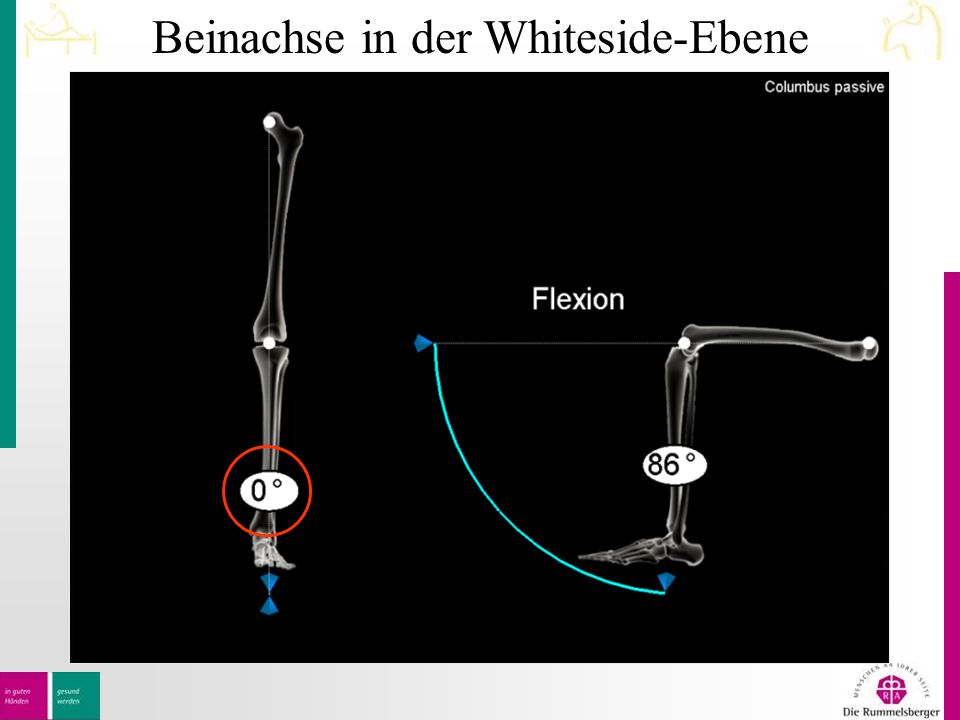
Beinachse in der Whiteside-Ebene

53
Ergebnisse der Navigation? Die Streuung der postoperativen Messwerte (Implantatposition und Beinachse) ist im Vergleich zur konventionellen Methode wesentlich schmäler!
 ist im Vergleich zur konventionellen Methode wesentlich schmäler!.")
54
Knieprothesen (Oberflächenersatz) Schwedenregister 2006
 Schwedenregister 2006")
55
Navigation ist ein digitalisiertes Mess-System auf der Basis von Daten welche durch Bewegung des Beines erhoben werden Navigation ist jederzeit veränderbar Erhebung der Daten im OP (Beinachsenberechnung Genauigkeit ca.1°) Für Operationen am Bein sehr geeignet
 Für Operationen am Bein sehr geeignet")
56
Der Mensch kann nicht zu neuen Ufern aufbrechen, wenn er nicht den Mut aufbringt, die alten zu verlassen.

57
Vielen Dank für Ihre Aufmerksamkeit

Ähnliche Präsentationen