Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Team-Steuerung Robbi 1 Team-Ebenen Robbi 2Robbi 3Robbi 4Robbi 5

2
Aufbau einer Ebene H ö h e r e E b e n e SensorenVerhaltenAktoren T i e f e r e E b e n e Physika- lische Aktoren Physika- lische Sensoren

3
Torschuß: Team-Ebene Feldspieler 1 Soll_ich = 0 Homing=>Decken Feldspieler 3 Soll_ich = 1 Torschuß Feldspieler 2 Soll_ich = 0 Homing =>Decken Feldspieler 4 Soll_ich = 0 Homing=>Frei- stellen Team: in jedem 16. Frame ausgewertet ( zweimal in der Sekunde) Angriff Ball ist in gegnerischer Hälfte
 Angriff Ball ist in gegnerischer Hälfte.")
4
Torschuß: Robbi-Ebenen Torschuß AnlaufVollstrecken Fahren_VollstreckenLenken_AnlaufLenken_vorwärtsFahren_Anlauf Schußziel Zielposition FahrenLenken Ebene 2: alle 16 Frames Ebene 1: alle 4 Frames Ebene 0: jeder Frame Feldspieler 3

5
Torschuß: Anlauf x 15cm prop. zu x Schußzie l Zielposition

6
Torschuß: Anlauf-Trajektorie

7
Torschuß: Vollstrecken 30cm Zielposition Positionen, bei denen Vollstrecken aktiv wird

8
Ballvorhersage: Anlauf

9
Sensor-Aggregation: Roboterposition Ebene 0: die vom Vision-Modul gelieferte Position „springt“ (bei stehendem Roboter) Ebene 1: geglättete Position
 Ebene 1: geglättete Position")
10
Sensor-Aggregation Ebene i-1 Ebene i+1 Ebene i

11
Taxis

12
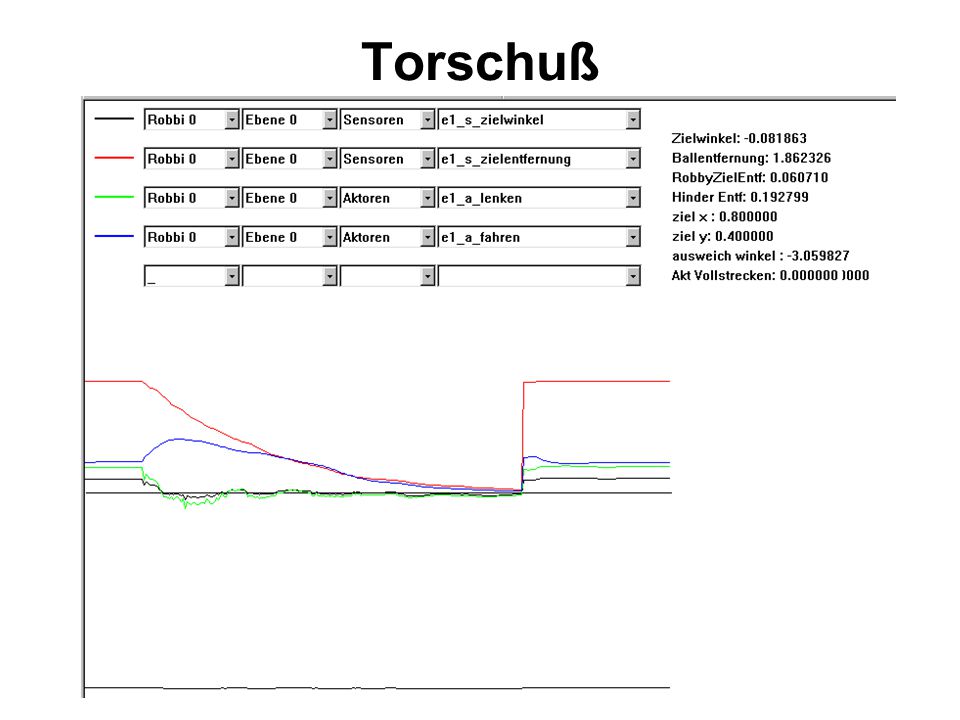
Torschuß

14
Torwartverhalten

Ähnliche Präsentationen