Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Betreuer: Christian Fleck
Motorproteine Tim Meyer - Betreuer: Christian Fleck

2
Wo werden Motorproteine gebraucht?
Muskelbewegung Transport in Zellen (z.B. Nervenzellen) Fortbewegung von Bakterien Weitere Anwendungen?
 Fortbewegung von Bakterien. Weitere Anwendungen")
5
Myosin, Kinesin und Dynesin
3 Gruppen von Motorproteinen Bewegen sich entlang von Filamenten Haben festgelegte Bewegungsrichtung Weitere Punkte??

6
Struktur der Motorproteine

7
Wie werden sie angetrieben?
„Treibstoff“: Ionengradient ATP-Hydrolyse: ATP > ADP + P Adenosintriphosphat

8
Filamente „Fäden“, an denen die Proteine entlangwandern
2 Arten: Actin und Microtubuli

9
Aktin

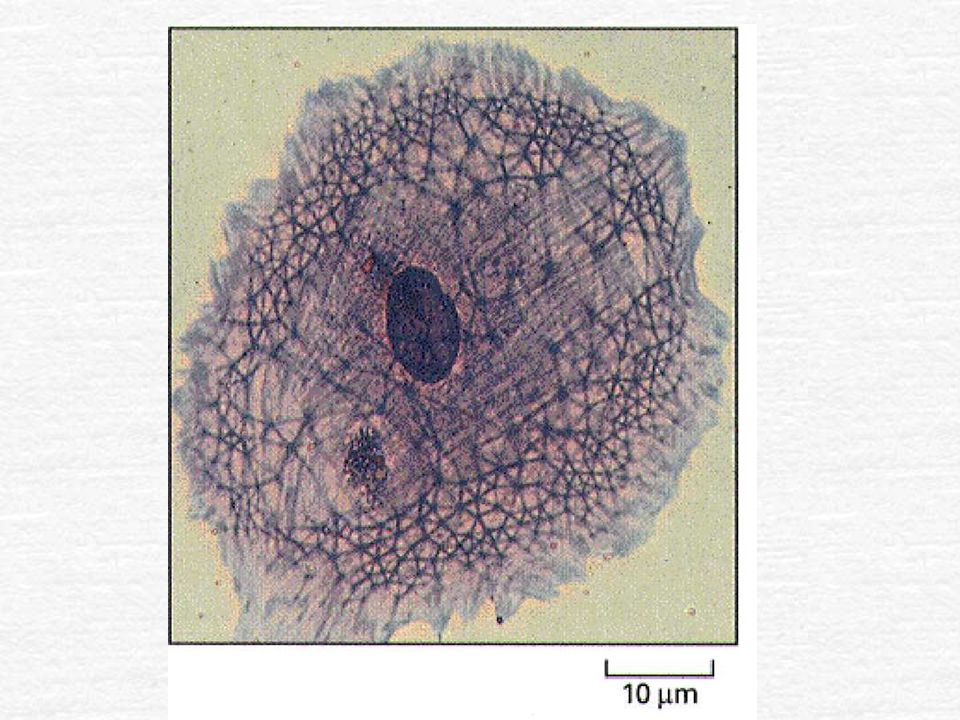
10
Microtubuli

11
Funktionsweise der Motoproteine
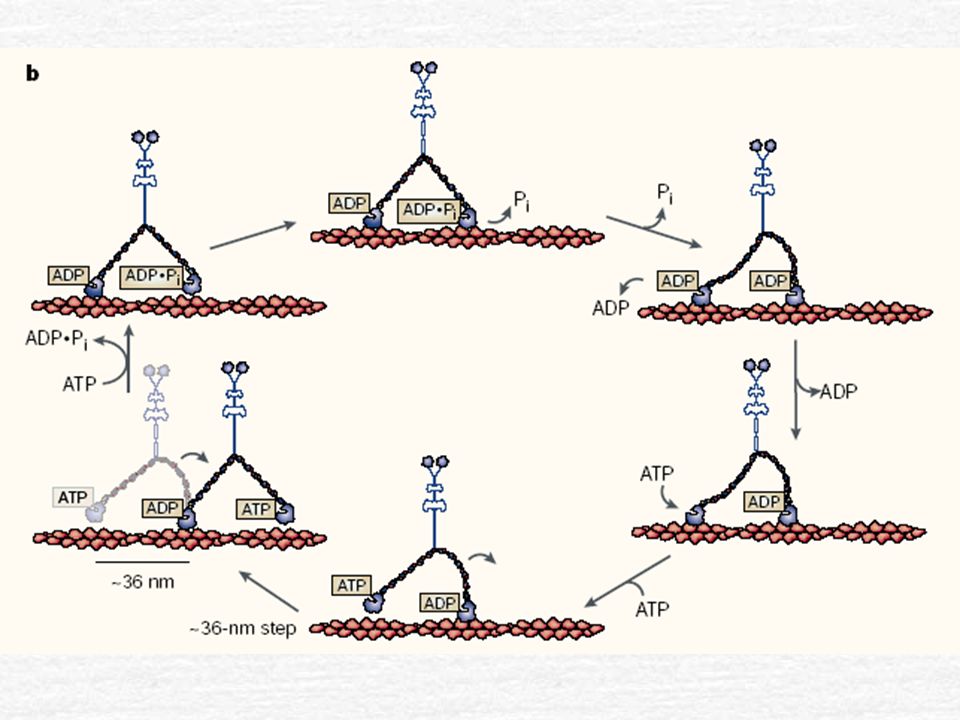
Erste Möglichkeit: Protein macht „Schritte“. (Myosin)
")
13
Funktionsweise der Motoproteine
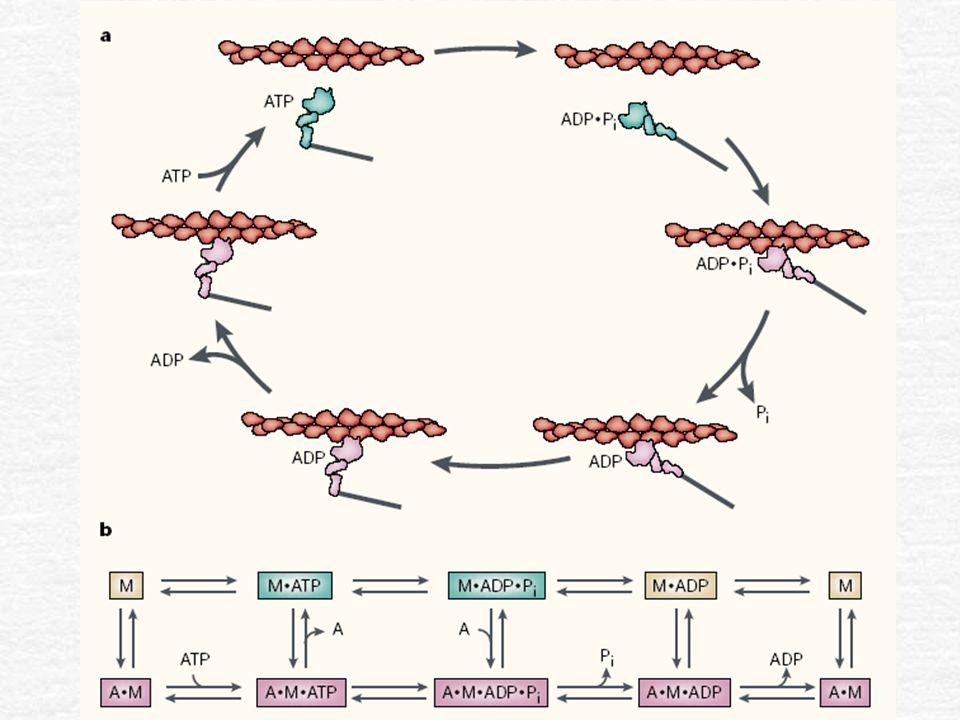
Zweite Möglichkeit: Protein „stößt sich ab“. (Muskel-Myosin)
")
15
Muskel-Myosin

16
Zusammenfassung: Bisher: Biochemie Als nächstes:
Versuch die Bewegung physikalisch zu beschreiben.

17
Probleme: Jeder Schritt ist reversibel
Struktur der Proteine ist sehr komplex Oft hat man nur Vermutungen wie es funktioniert

18
Vorgehensweise Vereinfachte allgemeine Annahmen
Überlege ob/wie damit Bewegung erzeugt werden kann

19
Annahmen: Filament ist periodisch und fest
Protein nimmt verschiedene Zustände ein System ist isotherm Bewegung ist 1-dimensional

20
Definition einiger Größen
µ = µATP µADP µP fext : Externe Kraft auf Protein Wi(x) : Chemische Potential des Motors im Zustand i an Position x -> Enthält die Symmetrie des Filaments wi(x) : Übergangsrate zwischen den Zuständen
 : Chemische Potential des Motors im Zustand i an Position x -> Enthält die Symmetrie des Filaments. wi(x) : Übergangsrate zwischen den Zuständen.")
21
2-Zustandsmodell Es gibt zwei Zustände:
Protein ist an Filament gebunden Protein hat sich von Filament gelöst Übergänge möglich durch: Thermische Anregung Verbrauch von ATP

22
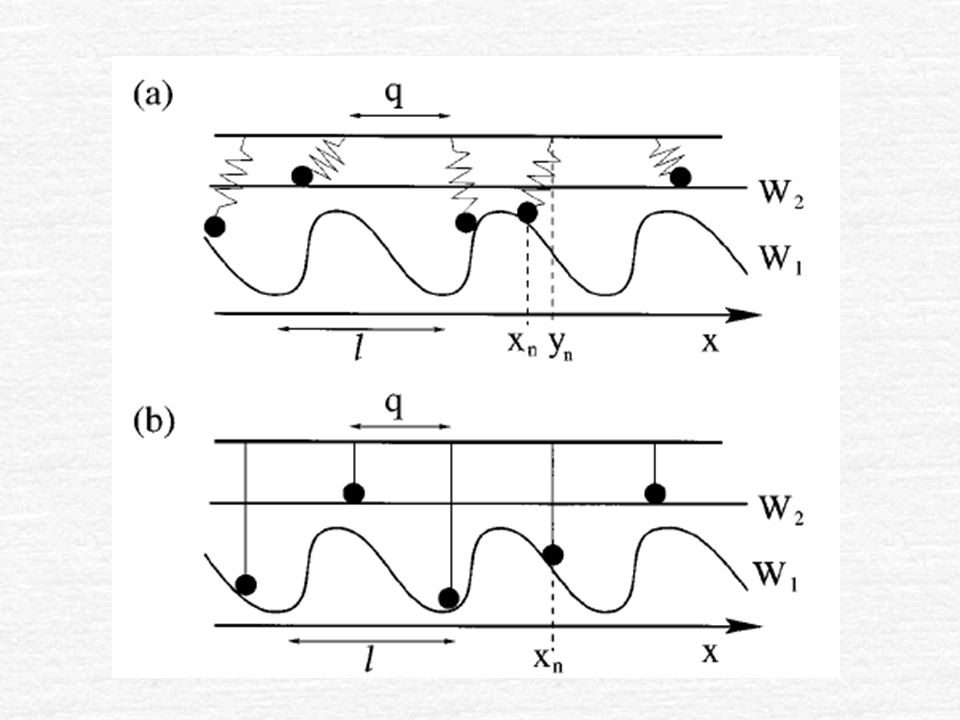
Beispiel:

23
Stochastische Beschreibung
Pi(x,t) : Wahrscheinlichkeit das Protein am Ort x zur Zeit t im Zustand i zu finden. Zeitliche Entwicklung der Wahrscheinlichkeits-dichten durch Fokker-Planck-Gleichung -> analog zur Diffusionsgleichung
 : Wahrscheinlichkeit das Protein am Ort x zur Zeit t im Zustand i zu finden. Zeitliche Entwicklung der Wahrscheinlichkeits-dichten durch Fokker-Planck-Gleichung. -> analog zur Diffusionsgleichung.")
24
Fokker-Planck-Gleichungen
Strom J setzt sich zusammen aus: Diffusion Kraft durch das Potential W Externe Kraft

25
(x) -> Abhängig von ATP/ADP Konzentration
Definition: (x) -> Abhängig von ATP/ADP Konzentration -> Maß für die Abweichung vom „detailed Balance“ Zustand Omega ist proportional zu µATP->Konzentration bei deltaµ groß!!
 -> Abhängig von ATP/ADP. Konzentration. -> Maß für die Abweichung vom „detailed. Balance Zustand. Omega ist proportional zu µATP->Konzentration bei deltaµ groß!!")
26
Wie erhält man die mittlere Geschwindigkeit?
Bewegung nur wenn: Potential asymmetrisch > 0 (ATP wird verbraucht)
")
27
Betrachte W(x): Zwei Extremfälle: (x) ist homogene Verteilung
(x) ist punktuelle Verteilung -> Modell der „active sites“
 ist punktuelle Verteilung. -> Modell der „active sites")
28
Erklärung Tau1/2 nicht zu groß und nicht zu klein!

29
Zusammenfassung „active sites“ erhöhen die Geschwindigkeit
-> Theorie wird bekräftigt Bewegung wird durch Diffusion angetrieben! -> „thermal ratchet“

30
Wie kann man „power stroke“ berücksichtigen?
-> nicht lokale Übergangsraten: w(x,x‘) : (x->x‘) -> Bewegung ohne Diffusionsschritt wäre möglich Das ist wesentlich effizienter! Kombination sind auch möglich
 : (x->x‘) -> Bewegung ohne Diffusionsschritt wäre möglich. Das ist wesentlich effizienter! Kombination sind auch möglich.")
31
Beispiel (ohne Diffusion):
:")
32
Kollektive Effekte Was passiert, wenn mehre Motoren zusammenarbeiten?
z.B.: im Muskel Modell: Motoren sind zufällig an starrem Filament befestigt Verbindung ist fest oder elastisch

34
1.Fall: symmetrisches Potential

35
2.Fall: asymmetrisches Potential

36
Variante des Modells Wieder feste Verbindung zum Motor
Aber keine freie Bewegung des Filaments

37
Es kommt zu Oszillationen des Filaments:

38
Zusammenfassung 2-Zustanzmodell liefert gutes Modell für Beschreibung der Motorproteine Ist ein Ansatz um künstliche mikroskopische Motoren zu bauen

Ähnliche Präsentationen