Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

2
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung Wenn ich gar nichts weiß! Indizierung eines unbekannten Beugungsbildes Lösen der Kristallstruktur!!! Problem: unbekannte Phase gemessene Daten sind 1D-Projektion eines 3D-Gitters nur Längen, aber nicht die Richtung von reziproken Gittervektoren sind messbar (in EK-Beugung kann auch deren Richtung gemessen werden) jeder reziproke Gitterpunkt steht für ein Set an Gitterebenen im direkten Raum jedem Bragg-Peak muss ein Satz an Miller/Laue-Indices zugeordnet werden Finde das kleinste Parallelepiped im reziproken Raum, welches die beobachtete Serie an Bragg-Peaks beschreibt! (konsistent mit kristallographischen Konventionen) 𝑑 ℎ𝑘𝑙 ∗ =ℎ 𝑎 ∗ +𝑘 𝑏 ∗ +𝑙 𝑐 ∗
 jeder reziproke Gitterpunkt steht für ein Set an Gitterebenen im direkten Raum jedem Bragg-Peak muss ein Satz an Miller/Laue-Indices zugeordnet werden. Finde das kleinste Parallelepiped im reziproken Raum, welches die beobachtete Serie an Bragg-Peaks beschreibt! (konsistent mit kristallographischen Konventionen) 𝑑 ℎ𝑘𝑙 ∗ =ℎ 𝑎 ∗ +𝑘 𝑏 ∗ +𝑙 𝑐 ∗")
3
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung

4
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung Lösbarkeit des Problems hängt extrem von der akkuraten Bestimmung von d-Werten (und damit den Elementarzellenparametern) ab Probleme: zufällige Fehler niedersymmetrische Elementarzellen Peaküberlagerung instrumentelle Fehler etc.
 ab. Probleme: zufällige Fehler. niedersymmetrische Elementarzellen. Peaküberlagerung. instrumentelle Fehler. etc.")
5
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit bekannter Elementarzelle Auflistung aller Indizes beobachtbarer (systematische Auslöschungen!!!) Linien Berechnung der Netzebenenabstände Zuordnung der hkl-Tripel evtl. Elementarzellengröße anpassen
 Linien. Berechnung der Netzebenenabstände. Zuordnung der hkl-Tripel. evtl. Elementarzellengröße anpassen.")
6
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit bekannter Elementarzelle

7
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit bekannter Elementarzelle Ziel der Indizierung (und Verfeinerung der Elementarzellenparameter) Minimierung Elementarzelle mit der höchsten Symmetrie Elementarzelle mit dem kleinstem Volumen geringste Anzahl an hkl-Indizes geringste Abweichung zwischen gemessenen und gerechneten Bragg-Positionen 𝑖=1 𝑁 2 𝜃 𝑜𝑏𝑠 −2 𝜃 𝑐𝑎𝑙𝑐 2 → min
 Minimierung. Elementarzelle mit der höchsten Symmetrie. Elementarzelle mit dem kleinstem Volumen. geringste Anzahl an hkl-Indizes. geringste Abweichung zwischen gemessenen und gerechneten Bragg-Positionen. 𝑖=1 𝑁 2 𝜃 𝑜𝑏𝑠 −2 𝜃 𝑐𝑎𝑙𝑐 2 → min.")
8
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit unbekannter Elementarzelle meist Trial-and Error 6 Elementarzellenparameter hkl-Zuordnung ohne Kenntnis der Elementarzelle Iterativ solange bis alle Peaks sinnvoll einen passenden hkl-Index haben = Rekonstruierung der Richtung von reziproken Gittervektoren aus ihren Längen

9
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit unbekannter Elementarzelle Lösung des Problem ist dennoch möglich, da kristallographische Gesetzmäßigkeiten gewisse Dinge verbieten oder erlauben

10
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit unbekannter Elementarzelle Lösung des Problem ist dennoch möglich, da kristallographische Gesetzmäßigkeiten gewisse Dinge verbieten oder erlauben wesentliche Bestandteile Peaks bei kleinesten Winkel haben typischerweise die einfachsten Indizes (h,k,l = -2 … 2) ausgelöschte Bragg-Peaks bei kleinen Winkeln hohe absolute Genauigkeit der Winkelpositionen (Minimierung von Probenversatz, Nullpunktverschiebung) Vermeiden von Verunreinigungen je geringer die Symmetrie desto komplexer das Problem
 ausgelöschte Bragg-Peaks bei kleinen Winkeln. hohe absolute Genauigkeit der Winkelpositionen (Minimierung von Probenversatz, Nullpunktverschiebung) Vermeiden von Verunreinigungen. je geringer die Symmetrie desto komplexer das Problem.")
11
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – Indizierung mit unbekannter Elementarzelle Startpunkt sind einige Peaks bei kleinen Beugungswinkeln (Basis-Set) Permutation von h,k,l ausgehend vom Basis-Set und Zuordnung zu Peaks Trial-and-Error-Algorithmen (bei hohen Symmetrien: kub … orth) Größe des Basis-Sets = Anzahl unabhängiger Elementarzellenparameter bis zu 30 weitere Peaks ausgehend von Trial-Lattice zuordnen je größer Basis-Set, desto größer Wahrscheinlichkeit einer positiven Lösung Startkristallsystem sollte höchste Symmetrie haben meist mehrere Lösungen Zone-Search-Algorithmen (bei niedrigen Symmetrien: mon, tri) Suche von 1D (z.B. h00, h10, 0k0,…) bzw. 2D-Zonen (z.B. hk0, h1l, 0kl,…) kombinieren und daraus 3D-Gitter erzeugen versuche gesamtes Beugungsbild mittels mutmaßlichem 3D-Gitter zu indizieren ergibt meist primitive Elementarzelle, die auf eine der 14 Bravais-Gitter reduziert werden muss TREOR DICVOL ITO
 Permutation von h,k,l ausgehend vom Basis-Set und Zuordnung zu Peaks. Trial-and-Error-Algorithmen (bei hohen Symmetrien: kub … orth) Größe des Basis-Sets = Anzahl unabhängiger Elementarzellenparameter. bis zu 30 weitere Peaks ausgehend von Trial-Lattice zuordnen. je größer Basis-Set, desto größer Wahrscheinlichkeit einer positiven Lösung. Startkristallsystem sollte höchste Symmetrie haben. meist mehrere Lösungen. Zone-Search-Algorithmen (bei niedrigen Symmetrien: mon, tri) Suche von 1D (z.B. h00, h10, 0k0,…) bzw. 2D-Zonen (z.B. hk0, h1l, 0kl,…) kombinieren und daraus 3D-Gitter erzeugen. versuche gesamtes Beugungsbild mittels mutmaßlichem 3D-Gitter zu indizieren. ergibt meist primitive Elementarzelle, die auf eine der 14 Bravais-Gitter reduziert werden muss. TREOR. DICVOL. ITO.")
12
Bestimmung der Raumgruppe
Bestimmung der Raumgruppe – TREOR benutzt Trial-and-Error suche nutzt einige Einschränkungen bzgl. der Permutationen der Indizes um Rechenleistung zu erhöhen (z.B. Ausschluß kollinearer reziproker Gittervektoren)
")
13
Bestimmung der Gitterparameter
Fehler der Gitterparameter entstammen direkt den Fehlern bei der Bragg-Winkel-Bestimmung Δ𝑑 𝑑 = cot 𝜃 Δ𝜃 Bestimmung von Gitterparametern bei möglichst großen Winkeln Anpassung mit Methoden der kleinsten Fehlerquadrate

14
Bestimmung der Linienposition
Linienposition = Position des Maximums 2B = 2 (I = max)
")
15
Bestimmung der Linienposition
Linienposition = Position des Maximums der angepassten Funktion

16
Bestimmung der Linienposition
Linienposition = Position des Maximums der angepassten Funktion

17
Bestimmung der Linienposition
Bestimmung der Linienposition – Wahl der Profilfunktion Profilfunktion enthält 3 miteinander gefaltete Beiträge: instrumentelles Profil Wellenlängendispersion der Quelle physikalisches Profil der Probe m … Überlappung von m Linien k … Bragg-Peak y … Peak-Funktion b … Untergrund 𝑌 𝑖 =𝑏 𝑖 + 𝑘=1 𝑚 𝐼 𝑘 𝑦 𝑘 2 𝜃 𝑘 𝑦 𝑘 2 𝜃 𝑘 +Δ2 𝜃 𝑘

18
Bestimmung der Linienposition
Bestimmung der Linienposition – Wahl der Profilfunktion Gauss: Lorentz: 𝐺 2𝜃 = 4 ln 𝜋 𝐻 𝐺 ⋅ exp [4 ln 2 ⋅ 2 𝜃 𝐵 −2𝜃 2 ] 𝐿 2𝜃 = 2 𝜋 𝐻 𝐿 ⋅ 𝜃 𝐵 −2𝜃 2 𝐻 𝐺 = 𝑈 tan 2 𝜃+𝑉 tan 𝜃 +𝑊 Caglioti-Gleichung 𝐻 𝐿 = 𝑋 cos 𝜃 +𝑌 tan 𝜃

19
Bestimmung der Linienposition
Bestimmung der Linienposition – Wahl der Profilfunktion pseudo-Voigt: Pearson VII: 𝑃𝑉=𝜂⋅ 4 ln 𝜋 𝐻 𝐺 ⋅ exp 4 ln 2 ⋅ 2 𝜃 𝐵 −2𝜃 −𝜂 ⋅ 2 𝜋 𝐻 𝐿 ⋅ 𝜃 𝐵 −2𝜃 2 0≤𝜂≤1 𝑃 𝑉𝐼𝐼 2𝜃 = 4 𝑚 2 −1 𝜋 𝐻 𝐺 𝑚 2 −1 2 𝜃 𝐵 −2𝜃 2 −𝑚 1≤𝑚≤ ∞ 10

20
Bestimmung der Linienposition
Bestimmung der Linienposition – Wahl der Profilfunktion

21
Bestimmung der Linienposition
Bestimmung der Linienposition – Wahl der Profilfunktion Pearson VII

22
Bestimmung der Linienposition
Bestimmung der Linienposition – Anpassung der Daten

23
Bestimmung der Linienposition
Bestimmung der Linienposition – Fehler in der Peakposition Peak-Position spiegeln direkt das reziproke Gitter wider (Netzebenenabstände = Länge von reziproken Gittervektoren) diese können von idealen Positionen abweichen durch: Δ2𝜃= 𝑝 1 tan 2𝜃 + 𝑝 2 sin 2𝜃 + 𝑝 3 tan 𝜃 + 𝑝 4 sin 2𝜃 + 𝑝 5 cos 𝜃 + 𝑝 6 Nullpunkt- verschiebung axiale Divergenz (durch Soller ↓, vernachlässigt, Peakasymmetrie) flache Probe (verletzte Fokussierung, vernachlässigt da gering) Probentransparenz (Eindringen des Strahls in dicke Probe, besonders bei leichten Elementen) Probenversatz (Fehler in der Position der Probe) 𝑝 4 = 1 2𝜇𝑅 𝑝 1,2 =− ℎ 2 𝐾 1,2 3 𝑅 2 𝑝 3 =− 𝛼 𝐾 3 𝑝 5 =− 2𝑧 𝑅 h … Probengröße K1,2 … Kollimatorkonstanten a … Divergenz K3 … Konstante m … lin. Absorptionskoeffizient z … Abstand zum Fokussierkreis
 diese können von idealen Positionen abweichen durch: Δ2𝜃= 𝑝 1 tan 2𝜃 + 𝑝 2 sin 2𝜃 + 𝑝 3 tan 𝜃 + 𝑝 4 sin 2𝜃 + 𝑝 5 cos 𝜃 + 𝑝 6. Nullpunkt- verschiebung. axiale Divergenz. (durch Soller ↓, vernachlässigt, Peakasymmetrie) flache Probe. (verletzte Fokussierung, vernachlässigt da gering) Probentransparenz. (Eindringen des Strahls in dicke Probe, besonders bei leichten Elementen) Probenversatz. (Fehler in der Position der Probe) 𝑝 4 = 1 2𝜇𝑅. 𝑝 1,2 =− ℎ 2 𝐾 1,2 3 𝑅 2. 𝑝 3 =− 𝛼 𝐾 3. 𝑝 5 =− 2𝑧 𝑅. h … Probengröße. K1,2 … Kollimatorkonstanten. a … Divergenz. K3 … Konstante. m … lin. Absorptionskoeffizient. z … Abstand zum Fokussierkreis.")
24
Bestimmung der Linienposition
Bestimmung der Linienposition – Anpassung der Daten

25
Auswertung der Linienpositionen (für kubische Strukturen)
Bestimmung der Gitterparameter – Anpassung der Daten

26
Auswertung der Linienpositionen
2 d (d1)²/d² (d1)²/d²(h²+k²+ℓ²) hkℓ a cos cot 27 333 36 442
²/d² (d1)²/d²(h²+k²+ℓ²) hkℓ a cos cot")
27
Bestimmung des Gitterparameters
Cohen-Wagner-Auftragung (kubisches Gitter) Bragg-Brentano Diffraktometer, kubisches Kristallgitter
 Bragg-Brentano Diffraktometer, kubisches Kristallgitter.")
28
Bestimmung des Gitterparameters
Cohen-Wagner-Auftragung (kubisches Gitter) Nullpunktverschiebung
 Nullpunktverschiebung.")
29
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter lineare Methode der kleinsten Fehlerquadrate lineares Gleichungssystem enthält 2q, Gitterparameter und lineare Zusammenhänge zwischen beiden A(n,m) mit n > m hat einen Lösungsvektor x für n Unbekannte, der die beste Lösung für alle n ist: überbestimmtes System Methode der kleinesten Fehlerquadrate beste Lösung resultiert aus der Berechnung partieller Ableitungen, die zu 0 gesetzt werden Lösung ergibt sich aus: 𝑨𝒙=𝒚 𝒙= 𝑨 𝑇 𝑨 −1 ( 𝑨 𝑇 𝒚)
 mit n > m hat einen Lösungsvektor x für n Unbekannte, der die beste Lösung für alle n ist: überbestimmtes System Methode der kleinesten Fehlerquadrate. beste Lösung resultiert aus der Berechnung partieller Ableitungen, die zu 0 gesetzt werden. Lösung ergibt sich aus: 𝑨𝒙=𝒚. 𝒙= 𝑨 𝑇 𝑨 −1 ( 𝑨 𝑇 𝒚)")
30
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter für das Problem der Gitterparameterbestimmung ergibt sich: Übergang ins reziproke Gitter 1/ 𝑉 2 [ ℎ 2 𝑏 2 𝑐 2 sin 2 𝛾 + 𝑘 2 𝑎 2 𝑐 2 sin 2 𝛽 + 𝑙 2 𝑎 2 𝑏 2 sin 2 𝛼 + 2ℎ𝑘𝑎𝑏 𝑐 2 cos 𝛼 cos 𝛽 −𝑐𝑜𝑠𝛾 +2ℎ𝑙𝑎 𝑏 2 𝑐 𝑐𝑜𝑠𝛼 cos 𝛾 − cos 𝛽 + 2𝑘𝑙 𝑎 2 𝑏𝑐 cos 𝛽 cos 𝛾 − cos 𝛼 = 4 sin 2 𝜃 𝜆 2 nicht-linear in a,b,c,a,b,g 𝑉 2 = 𝑎 2 𝑏 2 𝑐 2 1− cos 2 𝛼 − cos 2 𝛽 − cos 2 𝛾 +2 cos 𝛼 cos 𝛽 cos 𝛾 ℎ 2 𝑎 ∗2 + 𝑘 2 𝑏 ∗2 + 𝑙 2 𝑐 ∗2 +2ℎ𝑘 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ +2ℎ𝑙 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ +2𝑘𝑙 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ = 4 sin 2 𝜃 𝜆 2

31
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter für das Problem der Gitterparameterbestimmung ergibt sich: 𝑯 𝑇 𝑺𝑯= ℎ 𝑘 𝑙 𝑆 11 𝑆 12 𝑆 13 𝑆 12 𝑆 22 𝑆 23 𝑆 13 𝑆 23 𝑆 ℎ 𝑘 𝑙 = 4 sin 2 𝜃 𝜆 2 𝑆 11 = 𝑎 ∗2 = 𝑏 2 𝑐 2 sin 2 𝛾 𝑉 2 𝑆 12 = 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ = 𝑎𝑏 𝑐 2 cos 𝛼 cos 𝛽 − cos 𝛾 𝑉 2 𝑆 22 = 𝑏 ∗2 = 𝑎 2 𝑐 2 sin 2 𝛽 𝑉 2 𝑆 13 = 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ = 𝑎 𝑏 2 𝑐 cos 𝛼 cos 𝛾 − cos 𝛼 𝑉 2 𝑆 33 = 𝑐 ∗2 = 𝑎 2 𝑏 2 sin 2 𝛼 𝑉 2 𝑆 23 = 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ = 𝑎 2 𝑏𝑐 cos 𝛽 cos 𝛾 − cos 𝛼 𝑉 2

32
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter für das Problem der Gitterparameterbestimmung ergibt sich: 𝑺= 𝑨 𝑇 𝑨 −1 ( 𝑨 𝑇 𝒚) 𝒚= 4 sin 2 𝜃 1 𝜆 sin 2 𝜃 2 𝜆 2 ⋮ 4 sin 2 𝜃 𝑛 𝜆 2 𝑺= 𝑆 11 𝑆 22 𝑆 33 𝑆 12 𝑆 13 𝑆 23 𝑨= ℎ 𝑘 𝑙 ℎ 𝑘 𝑙 2 2 ⋮ ⋮ ⋮ ℎ 𝑛 2 𝑘 𝑛 2 𝑙 𝑛 ℎ 1 𝑘 1 2 ℎ 1 𝑙 1 2 𝑘 1 𝑙 1 2 ℎ 2 𝑘 2 2 ℎ 2 𝑙 2 2 𝑘 2 𝑙 2 ⋮ ⋮ ⋮ 2 ℎ 𝑛 𝑘 𝑛 2 ℎ 𝑛 𝑙 𝑛 2 𝑘 𝑛 𝑙 𝑛 = Ergebnis der Anpassung (ergibt Gitterparameter)
 𝒚= 4 sin 2 𝜃 1 𝜆 2 4 sin 2 𝜃 2 𝜆 2 ⋮ 4 sin 2 𝜃 𝑛 𝜆 2. 𝑺= 𝑆 11 𝑆 22 𝑆 33 𝑆 12 𝑆 13 𝑆 23. 𝑨= ℎ 1 2 𝑘 1 2 𝑙 1 2 ℎ 2 2 𝑘 2 2 𝑙 2 2 ⋮ ⋮ ⋮ ℎ 𝑛 2 𝑘 𝑛 2 𝑙 𝑛 2 2 ℎ 1 𝑘 1 2 ℎ 1 𝑙 1 2 𝑘 1 𝑙 1 2 ℎ 2 𝑘 2 2 ℎ 2 𝑙 2 2 𝑘 2 𝑙 2 ⋮ ⋮ ⋮ 2 ℎ 𝑛 𝑘 𝑛 2 ℎ 𝑛 𝑙 𝑛 2 𝑘 𝑛 𝑙 𝑛. = Ergebnis der Anpassung (ergibt Gitterparameter)")
33
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter für das Problem der Gitterparameterbestimmung, unter Berücksichtigung systematischer Fehler ergibt sich: Probenversatz: ℎ 2 𝑎 ∗2 + 𝑘 2 𝑏 ∗2 + 𝑙 2 𝑐 ∗2 +2ℎ𝑘 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ +2ℎ𝑙 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ +2𝑘𝑙 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ = 4 sin 2 𝜃+ 𝑧 𝑅 cos 𝜃 𝜆 2 Nullpunktfehler: ℎ 2 𝑎 ∗2 + 𝑘 2 𝑏 ∗2 + 𝑙 2 𝑐 ∗2 +2ℎ𝑘 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ +2ℎ𝑙 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ +2𝑘𝑙 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ = 4 sin 2 𝜃+Δ𝜃 𝜆 2 Trigonometrische Sätze: für kleine x gilt hinreichend genau beide nicht-linear sin 2 𝜃+𝑥 ≈ sin 2 𝜃+𝑥 sin 2𝜃 ℎ 2 𝑎 ∗2 + 𝑘 2 𝑏 ∗2 + 𝑙 2 𝑐 ∗2 +2ℎ𝑘 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ +2ℎ𝑙 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ +2𝑘𝑙 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ − 4𝑠 𝜆 2 𝑅 cos 𝜃 sin 2𝜃 = 4 sin 2 𝜃 𝜆 2 ℎ 2 𝑎 ∗2 + 𝑘 2 𝑏 ∗2 + 𝑙 2 𝑐 ∗2 +2ℎ𝑘 𝑎 ∗ 𝑏 ∗ cos 𝛾 ∗ +2ℎ𝑙 𝑎 ∗ 𝑐 ∗ cos 𝛽 ∗ +2𝑘𝑙 𝑏 ∗ 𝑐 ∗ cos 𝛼 ∗ −Δ𝜃 4 𝜆 2 sin 2𝜃 = 4 sin 2 𝜃 𝜆 2

34
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter für das Problem der Gitterparameterbestimmung, unter Berücksichtigung systematischer Fehler ergibt sich: 𝑺= 𝑨 𝑇 𝑨 −1 ( 𝑨 𝑇 𝒚) 𝑺= 𝑆 11 𝑆 22 𝑆 33 𝑆 12 𝑆 13 𝑆 23 𝑠 𝑅 𝒚= 4 sin 2 𝜃 1 𝜆 sin 2 𝜃 2 𝜆 2 ⋮ 4 sin 2 𝜃 𝑛 𝜆 2 𝑨= ℎ 𝑘 𝑙 ℎ 𝑘 𝑙 2 2 ⋮ ⋮ ⋮ ℎ 𝑛 2 𝑘 𝑛 2 𝑙 𝑛 ℎ 1 𝑘 1 2 ℎ 1 𝑙 1 2 𝑘 1 𝑙 1 2 ℎ 2 𝑘 2 2 ℎ 2 𝑙 2 2 𝑘 2 𝑙 2 ⋮ ⋮ ⋮ 2 ℎ 𝑛 𝑘 𝑛 2 ℎ 𝑛 𝑙 𝑛 2 𝑘 𝑛 𝑙 𝑛 cos 𝜃 1 sin 2 𝜃 1 𝜆 cos 𝜃 1 sin 2 𝜃 2 𝜆 2 ⋮ 4 cos 𝜃 1 sin 2 𝜃 𝑛 𝜆 2 = Ergebnis der Anpassung (ergibt Gitterparameter)
 𝑺= 𝑆 11 𝑆 22 𝑆 33 𝑆 12 𝑆 13 𝑆 23 𝑠 𝑅. 𝒚= 4 sin 2 𝜃 1 𝜆 2 4 sin 2 𝜃 2 𝜆 2 ⋮ 4 sin 2 𝜃 𝑛 𝜆 2. 𝑨= ℎ 1 2 𝑘 1 2 𝑙 1 2 ℎ 2 2 𝑘 2 2 𝑙 2 2 ⋮ ⋮ ⋮ ℎ 𝑛 2 𝑘 𝑛 2 𝑙 𝑛 2 2 ℎ 1 𝑘 1 2 ℎ 1 𝑙 1 2 𝑘 1 𝑙 1 2 ℎ 2 𝑘 2 2 ℎ 2 𝑙 2 2 𝑘 2 𝑙 2 ⋮ ⋮ ⋮ 2 ℎ 𝑛 𝑘 𝑛 2 ℎ 𝑛 𝑙 𝑛 2 𝑘 𝑛 𝑙 𝑛 4 cos 𝜃 1 sin 2 𝜃 1 𝜆 2 4 cos 𝜃 1 sin 2 𝜃 2 𝜆 2 ⋮ 4 cos 𝜃 1 sin 2 𝜃 𝑛 𝜆 2. = Ergebnis der Anpassung (ergibt Gitterparameter)")
35
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter zur Fehlerbestimmung ist es sinnvoll Wichtungen für einzelne Peakpositionen einzuführen Peakpositionen von Beugungslinien mit hoher Intensität sind genauer bestimmbar d-Werte bei hohen 2q-Werten sind akkurater als bei kleinen 2q (Dispersion in d) etc. 𝒙= 𝑨 𝑇 𝒘𝑨 −1 ( 𝑨 𝑇 𝒘𝒚) 𝒘= 𝑤 … 0 𝑤 2 2 … ⋮ ⋮ ⋱ 0 0 … ⋮ 𝑤 𝑛 2
 etc. 𝒙= 𝑨 𝑇 𝒘𝑨 −1 ( 𝑨 𝑇 𝒘𝒚) 𝒘= 𝑤 … 0 𝑤 2 2 … ⋮ ⋮ ⋱ 0 0 … 0 0 ⋮ 𝑤 𝑛 2.")
36
Bestimmung der Linienposition
Bestimmung der Gitterparameter – nicht-kubische Gitter zur Fehlerbestimmung ist es sinnvoll Wichtungen für einzelne Peakpositionen einzuführen Standardabweichungen können berechnet werden: 𝜎 2 𝜃 𝑗 = 𝑨 𝑇 𝒘𝑨 𝑗𝑗 −1 𝑘 𝑛 𝑤 𝑘 1 𝑑 𝑜𝑏𝑠 2 − 1 𝑑 𝑐𝑎𝑙𝑐 𝑛−𝑚 n … Anzahl an Gleichungen (Elementen in y) m … Anzahl unbekannter Parameter
 m … Anzahl unbekannter Parameter.")
37
Bestimmung der Linienposition
Bestimmung der Gitterparameter – systematische Fehler Parameter-korrelation Nullpunkt Versatz

38
Bestimmung der Linienposition
Bestimmung der Gitterparameter – systematische Fehler Ausreißer

39
Bestimmung der Linienposition
Bestimmung der Raumgruppe – Bestimmung der Elementarzelle

40
Kinematische Beugungstheorie
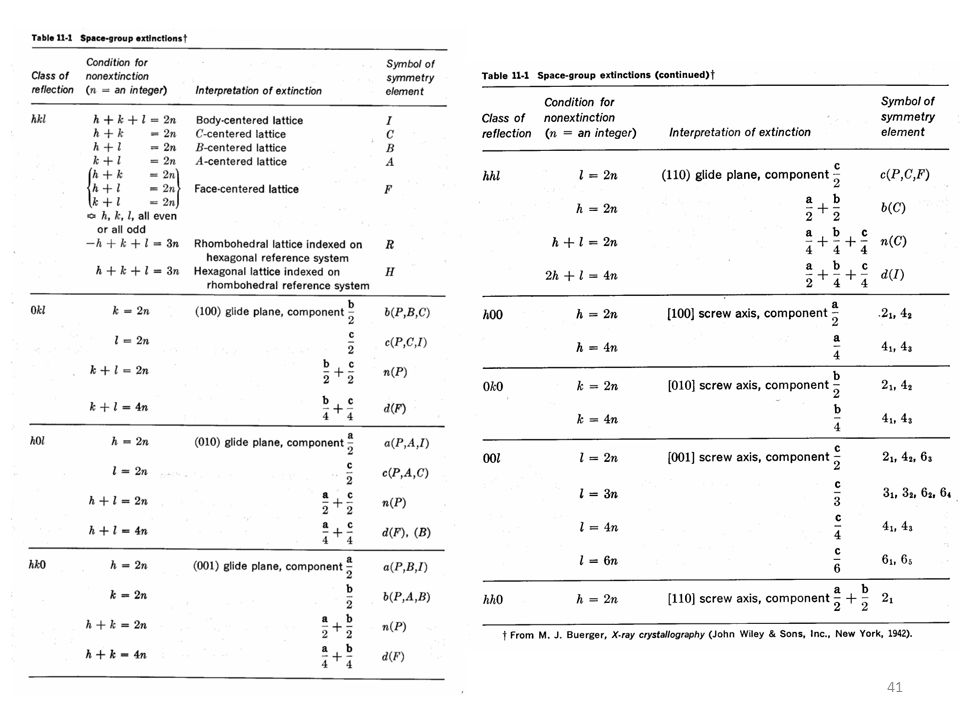
Strukturfaktor – Periodizität/Symmetrie des Gitters Konsequenzen: Translationssymmetrie (Zentrierungen, Schraubenachsen, Gleitebenen) beeinflusst die Symmetrie des Beugungsbildes nicht, wohl aber systematische Abwesenheit von bestimmten Beugungsmaxima Übung systematische Abwesenheit: Bsp. goodwin.chem.ox.ac.uk Ziel: Interpretation systematischer Abwesenheit von Reflexen bzgl. der Kristallsymmetrie
 beeinflusst die Symmetrie des Beugungsbildes nicht, wohl aber systematische Abwesenheit von bestimmten Beugungsmaxima. Übung systematische Abwesenheit: Bsp. goodwin.chem.ox.ac.uk. Ziel: Interpretation systematischer Abwesenheit von Reflexen bzgl. der Kristallsymmetrie.")
Ähnliche Präsentationen


 M. Lang>")









>")







