Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
MagicMap – Kooperative Positionsbestimmung über WLAN
Peter Ibach Humboldt-Universität Institut für Informatik Lehrstuhl für Rechnerorganisation und Kommunikation

2
Inhalt Location Based Services – Heute und Morgen
Voraussetzung: Positionsbestimmung Ortungsverfahren Signalstärke-basierte Ortung über WLAN MagicMap

3
Location Based Services – Heute
Technology Provider Mobile Device Provider or Vendor Infrastructure Provider Mobile Network Operator Content Provider Portal Operator Advertisement / Payment Jamba! Finder Siemens T-D1 Cell-ID: T-D1 Nokia, Siemens, Sony, etc. Jamba AG - GPS: SnapTrack, Global Locate Siemens VDO, Pioneer, Garmin, etc. Tele Atlas, NavTeq, etc. Navigation Systems keine Flexibilität

4
Location Based Services – Morgen
services providing the same interfaces (port types) Semantic Location Determination Position Sensing Connection Content Accounting Cell-ID Ontology 1 Bluetooth Flat GPS Ontology 2 UMTS PPT RFID Ontology 3 WLAN composite service PPV WLAN service instances at disposal (ports)
 Semantic Location Determination. Position Sensing. Connection. Content. Accounting. Cell-ID. Ontology 1. Bluetooth. Flat. GPS. Ontology 2. UMTS. PPT. RFID. Ontology 3. WLAN. composite service. PPV. WLAN. service instances at disposal (ports)")
5
Vision: Konvergenz von Realität und Virtualität
services with regional scope layers with specific objects and their locations services associated to specific objects/locations physical space informational space

6
Verfügbare WLAN-Netze:

7
Installierte RFID-Chips:

8
Informationsanbieter (Content):
:")
9
GPS-Satelliten:

10
Services auf reale Objekte gemapped
WLAN: Local-IP: GPS-Pos: WLAN-Pos: RFID-Pos: Content:

11
Runtime Composition Benutzer mit mobilem Gerät.
Dynamic Runtime Composition Local-IP GPS-Pos. (Local) Content Runtime Composition Benutzer mit mobilem Gerät. WLAN: Local-IP: GPS-Pos: WLAN-Pos: RFID-Pos: Content:
 Content. Runtime Composition. Benutzer mit. mobilem Gerät. WLAN: Local-IP: GPS-Pos: WLAN-Pos: RFID-Pos: Content:")
12
Benutzer betritt Gebäude...
Dynamic Runtime Composition Runtime Composition Benutzer betritt Gebäude... WLAN GPS-Pos. Content (via WLAN) WLAN: Local-IP: GPS-Pos: WLAN-Pos: RFID-Pos: Content:
 WLAN: Local-IP: GPS-Pos: WLAN-Pos: RFID-Pos: Content:")
13
In einem Gebäude: WLAN: RFID: Content: GPS:

14
Services im Gebäude WLAN: Local-IP: WLAN-Pos: RFID-Pos: Content:

15
Dynamic Runtime Composition
WLAN WLAN-Pos. Content (via WLAN) WLAN: Local-IP: WLAN-Pos: RFID-Pos: Content:
 WLAN: Local-IP: WLAN-Pos: RFID-Pos: Content:")
16
Dynamic Runtime Composition
WLAN RFID-Pos. Content (via WLAN) Runtime Composition WLAN: Local-IP: WLAN-Pos: RFID-Pos: Content:
 Runtime Composition. WLAN: Local-IP: WLAN-Pos: RFID-Pos: Content:")
17
Ortungsverfahren Verfahren Beispiele Angle of arrival (AOA)
Time difference of arrival (TDOA) Signal strength (RSS) Infrastructure based Client based Triangulation Profiling static dynamic Propagation Deterministic Probabilistic IMSI Catcher Siemens/WhereNet/ Aeroscout Ekahau PlaceLab, Intel/UC Berkeley MagicMap, HU-Berlin LEASE, Avaya Labs Research RADAR, Microsoft Research HORUS, Uni Maryland
 Signal strength (RSS) Infrastructure based. Client based. Triangulation. Profiling. static. dynamic. Propagation. Deterministic. Probabilistic. IMSI Catcher. Siemens/WhereNet/ Aeroscout. Ekahau. PlaceLab, Intel/UC Berkeley. MagicMap, HU-Berlin. LEASE, Avaya Labs Research. RADAR, Microsoft Research. HORUS, Uni Maryland.")
18
Beispiel: System Moby-R von Siemens/WhereNet
Antennen Trigger (Durchfahrtssensor) m Call Button RFID-Tag Wireless AccessPoint Visualisierungs- Clients Ortungs- Server RFID-Tag sendet periodisch eine ID aus (2,4 GHz, Air Interface Protocol, INCITS 371.1) Jede Antenne gibt empfangener ID Zeitstempel und sendet dies zum Server Ortungs-Server berechnet den Ort durch Zeitdifferenzen-Triangulierung Der Ortungs-Server aktualisiert Ort und den Status des Tags in der Datenbank
 m. Call Button. RFID-Tag. Wireless. AccessPoint. Visualisierungs- Clients. Ortungs- Server. RFID-Tag sendet periodisch eine ID aus (2,4 GHz, Air Interface Protocol, INCITS 371.1) Jede Antenne gibt empfangener ID Zeitstempel und sendet dies zum Server. Ortungs-Server berechnet den Ort durch Zeitdifferenzen-Triangulierung. Der Ortungs-Server aktualisiert Ort und den Status des Tags in der Datenbank.")
19
Anforderungen Outdoor- und Indoor-Ortung Geringe Kosten
Hohe Genauigkeit Problemlose Interoperabilität Universelle Einsatzfähigkeit Keine Änderung vorhandener Hardware/Infrastruktur Hoheit über die eigenen Positionsdaten Signalstärke-basierte Ortung über WLAN?

20
Hot Spots in der City Frankfurt
Quelle: Lindner, Fritsch, Plank, Rannenberg (2004)
")
21
WLAN Abdeckung – Uni Campus Adlershof
2 = #APs

22
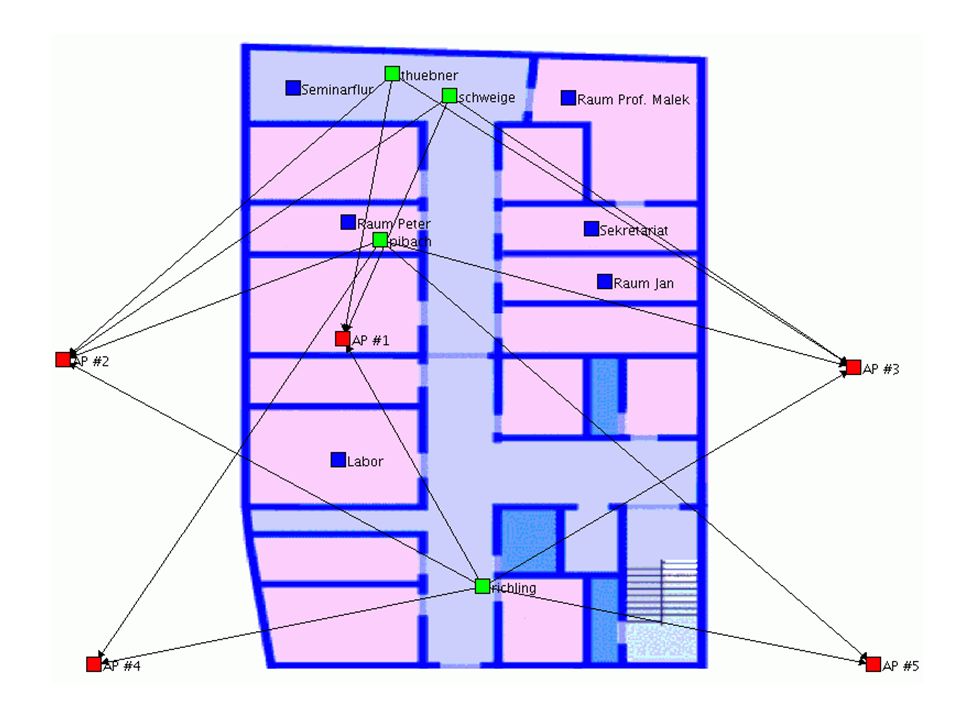
Signalstärke-basierte Triangulierung
AP2 AP1 RSS2 RSS1 RSS3 AP3

24
Korrelation Signalstärke zu Entfernung
Entfernung in m 100 Lineare Näherung -100 -30 Signalstärke in dBm

25
Probleme Dämpfung Streuung Reflektion Signal Radio-Map

26
Radio-Map Beispiel Access Point rz19 Access Point rz16 Access Point rz18 Erdgeschoss Jura/Wirtschaft der Universität Regensburg Zellgröße: 1,2 m², Anzahl Messpunkte: 1012 Quelle: Denise Reinert, Uni Regensburg

27
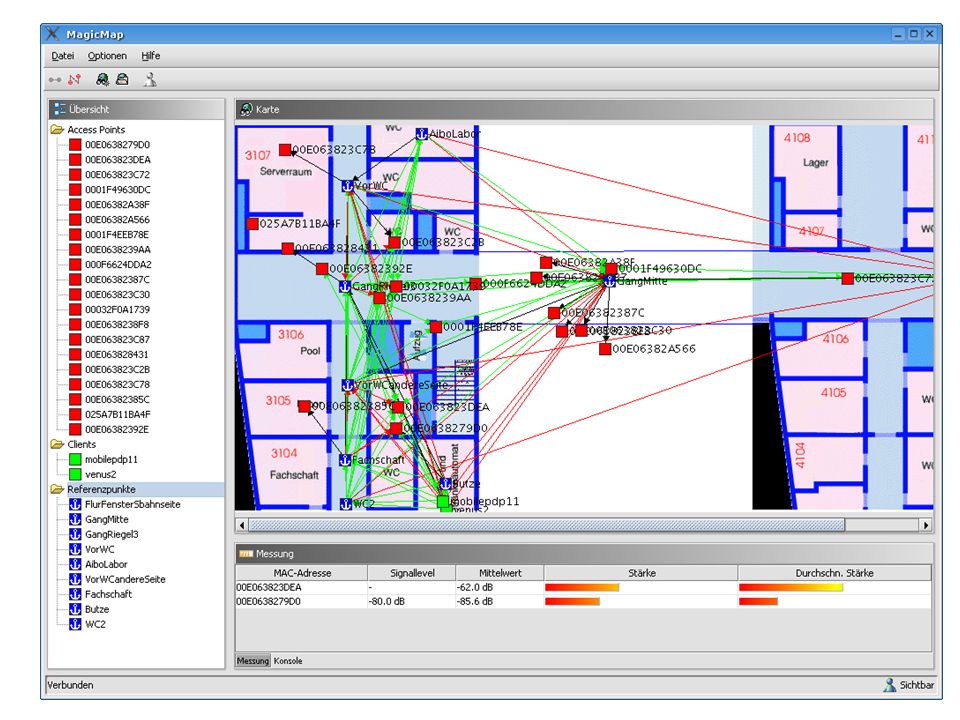
Radio Map Tool - Screenshot

28
RADAR (Microsoft Research)
Testumgebung RADAR 42,96m x 21,84m 49 Messpunkte Horus: die gesamte Umgebung im Durchschnitt von 4 Aps abgedeckt

29
Signalstärke über der Zeit
Quelle: Tao et al. 2003

30
LEASE (Avaya Labs Research)
AP: SE: Sniffer: LEE: Signal Emitter (SE) Tags an bekannten Positionen senden periodisch Sniffer Messen Signalstärke an bekannten Positionen und schicken diese an einen Server (LEE) Location Estimation Engine (LEE) berechnet dynamisch die Radio-Map aus den Signalstärkemessungen
 Tags an bekannten Positionen senden periodisch. Sniffer Messen Signalstärke an bekannten Positionen und schicken diese an einen Server (LEE) Location Estimation Engine (LEE) berechnet dynamisch die Radio-Map aus den Signalstärkemessungen.")
31
Sniffer Prototype 100/133 MHz AMD ElanSC520 CompactFLASH card
Orinoco b PCMCIA card (in promiscuous mode) Two 10/100 Mbps Ethernet ports (Power over Ethernet) 1 Serial port
 Two 10/100 Mbps. Ethernet ports (Power. over Ethernet) 1 Serial port.")
32
Institut für Informatik in Berlin-Adlershof

34
Positionierungs-Mehrdeutigkeiten
Tatsächliche Position ? ? Nearest- Neigbor Schätzung nach k-Nearest-Neighbor Mittelwert Access Point Referenzpunkt

35
~10m (Triangulation) ~3m (Profiling)
Genauigkeit Verfahren Mittlerer Fehler RADAR (Profiling) ~3m RADAR (Propagation) ~4.3m HORUS (Probabilistic) ~2m LEASE (Dynamic Profiling) PlaceLab (Triangulation) ~10m Ekahau (Profiling) ~1m WhereNet, Aeroscout (TDOA) MagicMap (Hybrid) ~10m (Triangulation) ~3m (Profiling)
 ~3m. RADAR (Propagation) ~4.3m. HORUS (Probabilistic) ~2m. LEASE (Dynamic Profiling) PlaceLab (Triangulation) ~10m. Ekahau (Profiling) ~1m. WhereNet, Aeroscout (TDOA) MagicMap (Hybrid) ~10m (Triangulation) ~3m (Profiling)")
36
Theoretisches Optimum
Range of (dBm) Mean value of (dBm) 0.993 Propagation constant 2.4 Probability, α 0.5 Number of APs, n 3 Distance between APs 50m Rn for n=3 and α=0.5 1.549 Minimum uncertainty 1.5m Quelle: Krishnakumar et al. 2005
 Mean value of (dBm) Propagation constant Probability, α Number of APs, n. 3. Distance between APs. 50m. Rn for n=3 and α= Minimum uncertainty. 1.5m. Quelle: Krishnakumar et al")
37
Uncertainty as a function of location

38
Minimum Uncertainty Vs. Number of APs Minimum Uncertainty Vs. Distance between APs

39
Ausblick Privacy Enhancing Technologies (PET)
3D-Triangulation und -Visualisierung Transparenter Übergang zwischen den Karten Peer-to-Peer Signalstärke

40
Zusammenfassung Positionsbestimmung ist Voraussetzung für LBS
Indoor-Positionsbestimmung über WLAN ist in Grenzen möglich MagicMap: hybrides Verfahren mit Kooperation für dynamisches Profiling Open Source, Point-n-Click-Tool für Experimente Ebenso für GSM/Bluetooth anwendbar Download (Windows/Linux):
:")
Ähnliche Präsentationen