Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Selbstanpassende Software
Johannes Schick & Wolfram Urich

2
Referatsaufbau Interpretation von Luftaufnahmen Packen in Echtzeit

3
Selbstanpassende Software
Interpretation von Luftaufnahmen

4
Gliederung Ansatz selbstanpassender Software Typ-2 Berechnungen
Die GRAVA-Softwarearchitektur Identifikation von Regionen

5
Ansatz Definition Selbstanpassende Software wertet ihr eigenes Verhalten aus und ändert dieses Verhalten, wenn die Auswertung anzeigt, daß sie nicht das zustande bringt für was die Software konzipiert ist oder wenn bessere Funktionalität oder Leistungsfähigkeit erreicht werden können. DARPA, 1998

6
Ansatz Probleme mit nicht fest umrissener Umgebung können mit herkömmlichen Mitteln nicht gelöst werden, z.B. Bildinterpretation Lösung: selbstanpassende Software Ziel: Stabilität auch in unbekannten Umgebungen Programmiersprachen: Java, objektorientiertes Lisp,...

7
Ansatz Beispiele: Raketen Roboter zur Detektion von Unterwasserminen
unbemannte Aufklärungsflugzeuge Roboter zur Erforschung von Planetenoberflächen Maschinelles Packen Active Trust Management NASA, Projekt Morphing: selbstanpassende Flugsysteme für Raumfahrtvehikel

8
Ansatz Merkmale selbstanpassender Software
besteht i.a. nicht nur aus einem einzelnen Programm, sondern aus verschiedenen, spezialisierten Einzelprogrammen, hier durch Agenten realisiert Fähigkeit Zustand der Berechnungen zu beobachten Fähigkeit des Diagnostizierens von Problemen Fähigkeit Änderungen vorzunehmen, um Abweichungen vom verlangten Verhalten zu korrigieren => erneute Annäherung an Programmziel

9
Ansatz Punkt 2 und 4 bekannt unter Stichwort „Reflektierende Software“ (alter, bekannter Ansatz) Unterschied zwischen s.S. und Reflektion: Reflektierende Software weiß nicht welche Änderungen vorgenommen werden sollen und wie auf bessere Ergebnisse hingearbeitet werden kann Reflektion = Mittel zur Selbstanpassung

10
Typ-2 Berechnungen Unterteilung der Berechnungen nach Vorhersagbarkeit der Umgebung Typ-1 Berechnungen: Umgebung komplett bekannt Typ-2 Berechnungen: Umgebung nicht bis ins letzte Detail vorhersagbar

11
Typ-2 Berechnungen Klassische Informatik befaßt sich nur mit Typ-1 Berechnungen in der Natur vorkommende Berechnungen durchgehend vom 2. Typus, trotzdem stabil (Bsp.: Fliege: findet sich in Umgebung zurecht) wenn Erfolg einer Berechnung aufgrund der Komplexität der Umgebung nicht gewährleistet werden kann:
 wenn Erfolg einer Berechnung aufgrund der Komplexität der Umgebung nicht gewährleistet werden kann:")
12
Typ-2 Berechnungen Überprüfen wie gut die angestellten Berechnungen waren Änderungen vornehmen, die zu hoffentlich besserem Ergebnis führen Hier zeigt sich: Typ-2 Berechnungen = Typ-1 Berechnungen eingeschlossen in Kontrollsystem

13
Typ-2 Berechnungen können also gesamtes Wissen über Typ-1 Berechnungen übernehmen und zusätzlich: Programmintention muß bekannt sein es muß gemessen werden inwiefern diese Intention getroffen wurde es muß „korrigierende Kraft“ existieren, die Programmverhalten dem gewünschten Verhalten annähert

14
Typ-2 Berechnungen Selbstanpassende Software = Versuch Typ-2 Berechnungen durch System mit „korrigierender Kraft“ zu realisieren, die Änderungen am Programm vornimmt Spektrum reicht vom Anpassen der Programmparameter bis hin zur Umschreibung des Programmcodes

15
GRAVA-Architektur Bildinterpretation = Paradeanwendung für Selbstanpassung, da Umwelt nie ganz vorhersagbar diese meistens dynamischer Natur ist, z.B. verschiedene Flugphasen: Höhe, Tageszeit (->Lichintensität), Wetterbedingungen, Jahreszeit (->Schnee) Architektur dient zur gleichzeitigen Segmentation und Interpretation von Luftaufnahmen
, Wetterbedingungen, Jahreszeit. (->Schnee) Architektur dient zur gleichzeitigen Segmentation und Interpretation von Luftaufnahmen.")
16
GRAVA-Architektur es existiert nicht die beste Segmentierung, da Aufteilung und Interpretation von Bedürfnissen des Anwenders abhängen, z.B. Aufteilung und Etikettierung nach Getreidearten >=< Aufteilung nach bewohnten und unbewohnten Gebieten

18
GRAVA-Architektur Systemarchitekt: Paul Robertson
University of Oxford, UK Forschungsschwerpunkte: AI, insb. „Computer Vision“ Selbstanpassende Software Reflektierende Systeme Höhere Programmierspachen, hat z.B. erstes 32-Bit-Lisp entwickelt

19
GRAVA-Architektur Arbeiten über Bildinterpretation gesponsert vom DARPA und der Air Force Präsident und Leiter der Technologieabteilung der Dynamic Object Language Labs (-> Objektorientierte Programmiertools, z.B.Yolamba = obj.orient. SCHEME)
")
20
Herstellen eines Bild-
Pool von Agenten Bilder Herstellen eines Bild- interpretations und -segmentations- kreislaufs Segmentieren und Interpretieren der Bilder Der Bilderkorpus: Eine Datenbank mit Bildern und Ex- pertenanmerkungen Bilderwissen Interpretation Auswer- tung

21
GRAVA-Architektur Innovationen der GRAVA-Architektur:
Meta-Agenten produzieren Agentenkreisläufe zur Bildsegmentation und –interpretation benutzt Minimum Description Length-Ansatz

22
GRAVA-Architektur Bildinterpretation beruht auf Wahrscheinlichkeiten, gestehen den Dingen die größte Wahrscheinlichkeit zu, die wir glauben zu sehen („Optische Täuschungen“) führt zu Ansatz der Minimum Description Length (MDL) Agenten werden auf Bereiche eines Bildes angesetzt, ggf. mehrere Agenten auf selben Bereich sie liefern Beschreibung, die dann codiert wird Beschreibung, die kürzesten globalen Code liefert gilt als wahrscheinlichste und wird übernommen
 führt zu Ansatz der Minimum Description Length (MDL) Agenten werden auf Bereiche eines Bildes angesetzt, ggf. mehrere Agenten auf selben Bereich. sie liefern Beschreibung, die dann codiert wird. Beschreibung, die kürzesten globalen Code liefert gilt als wahrscheinlichste und wird übernommen.")
23
GRAVA-Architektur Erklärung: die am häufigsten vorkommenden Symbole (Häuser, Straßen, etc.) werden durch die wenigsten Bits codiert => je kürzer Code, desto wahrscheinlicher ist die Korrektheit der Beschreibung Code wird nicht übertragen! Dient nur dem Auffinden der wahrscheinlichsten Beschreibung Metaagenten sollen Agenten auswählen, die kürzeste globale Beschreibung liefern
 werden durch die wenigsten Bits codiert => je kürzer Code, desto wahrscheinlicher ist die Korrektheit der Beschreibung. Code wird nicht übertragen! Dient nur dem Auffinden der wahrscheinlichsten Beschreibung. Metaagenten sollen Agenten auswählen, die kürzeste globale Beschreibung liefern.")
24
GRAVA-Architektur Problem: ggf. können mehrere Agenten die Beschreibungslänge für Region verkürzen keine Lösung: Wahl von Agent, der kürzeste Beschreibung für Region liefert, denn lokale Verbesserung der Beschreibung führt nicht notwendig zu globaler Verbesserung Lösung: Monte-Carlo-Algorithmus, der Agenten (quasi-)zufällig auswählt; hierbei werden die Wahrscheinlichkeiten der Agenten gewichtet mit ihrer „Wahlstärke“, die sich aus Beitrag zur Beschreibungslänge berechnet
zufällig auswählt; hierbei werden die Wahrscheinlichkeiten der Agenten gewichtet mit ihrer „Wahlstärke , die sich aus Beitrag zur Beschreibungslänge berechnet.")
25
Regionen entdecken, welche ihrerseits einige/alle Pixel der
Start Initialisiere das gesamte Bild als eine einzige Region 1) Für jede Region Finde Agenten, die neue Regionen entdecken, welche ihrerseits einige/alle Pixel der Region fortnehmen; dies reduziert die Beschreibungslänge 2) Für jede Region Versuche die Beschreibungslänge durch das Abgeben von Pixeln an Nachbar- bzw. innere Regionen zu verkürzen Ende wenn keine neuen Regionen oder keine Reduktion der Beschreibungs- länge 3) Für jede Region Versuche die Beschreibungs- länge durch das Verschmelzen mit Nachregionen zu mini- mieren
![]()
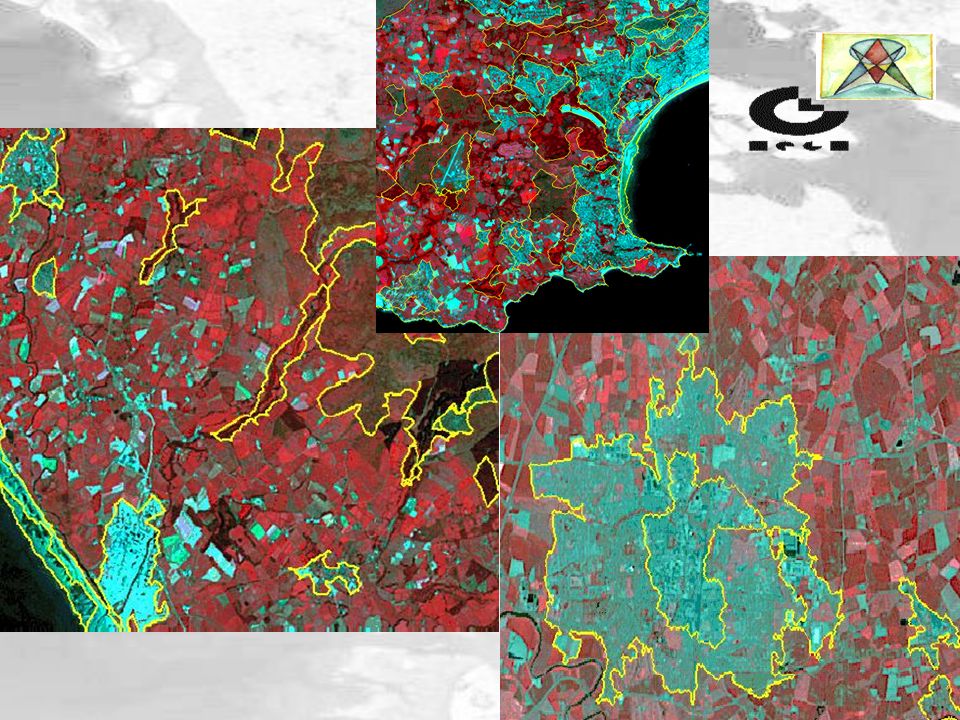
26
GRAVA-Architektur 3 Regionen: 1x Hintergrund und 2x See
Beachte: Inseln gehören noch zum Hintergrund

27
GRAVA-Architektur 20 Iterationen später
Beachte: Inseln = neue Regionen (Stufe 1) in Inselregionen werden von nun an keine neuen Regionen gefunden => STOP für diese 2 Regionen Hintergrundregion hat Grenzpixel an Seeregion abgegeben (Stufe 2)
 in Inselregionen werden von nun an keine neuen Regionen gefunden => STOP für diese 2 Regionen. Hintergrundregion hat Grenzpixel an Seeregion abgegeben (Stufe 2)")
28
GRAVA-Architektur neue Seeregion oben links (Stufe 1)
durch Anwenden der Stufen 1-3 ist große Seeregion in mehrere Regionen aufgesplittet worden

29
GRAVA-Architektur 1 Iteration später
Seeregionen => eine einzige Seeregion (Verschmelzen, 3. Stufe) kürzere Kodierung, da nicht für jede Seeregion Strukturinformationen gespeichert werden müssen und weniger Grenzinfos
 kürzere Kodierung, da nicht für jede Seeregion Strukturinformationen gespeichert werden müssen und weniger Grenzinfos.")
30
GRAVA-Architektur Repräsentation des Bildes Grenzpixel Pixel-
aufzählung : Region : Art der Region : Startpixel der Grenze : Anzahl der Grenzpunkte
![]()
31
GRAVA-Architektur Grenzpixel: Beginn bei Startpixel, dann wird jeder Pixel in Abhängigkeit von Vorgänger angegeben Anschließend werden innere Pixel von links oben nach rechts unten angegeben Datenstruktur liefert Position und Form der Regionen
![]()
32
Regionenidentifikation
mdst. 3 Möglichkeiten zur Bestimmung des Inhalts einer Region: Vergleichen der Umrissform mit aus dem Korpus gelernten Umrissformen Mustervergleich der inneren Pixel mit aus der Datenbank gelernten Grundmustern Einbeziehung des Bildkontextes

33
Regionenidentifikation
es werden Regeln aus Bildern (aus dem Korpus) extrahiert, um Zusammenhänge zwischen Regionen miteinzubeziehen Region1 wird als Tripel beschrieben: Repräsentation der Regionen ist invariant bzgl. Rotation sie kann mit „Verschleierung“ umgehen: Bildrand Nebel und Wolken
 extrahiert, um Zusammenhänge zwischen Regionen miteinzubeziehen. Region1 wird als Tripel beschrieben: Repräsentation der Regionen ist invariant bzgl. Rotation. sie kann mit „Verschleierung umgehen: Bildrand. Nebel und Wolken.")
34
Regionenidentifikation
Verschleierung Verschleierung kann mehrere interne und externe Regionen überdecken => „*“ Bildinterpretation sollte Wahrscheinlichkeiten für Inhalt der verdeckten Regionen liefern Region1 wird beschrieben durch Regel:

35
Regionenidentifikation
Fel- der 3 Regel W. Felder 2 Felder 1 Stadt See Fluß Straße Sumpf 1 Sumpf 2

36
Regionenidentifikation
aus Korpus werden Vielzahl von Regeln gelernt kommt Regel mehrfach vor wird Wahrscheinlichkeit gemittelt => realitätstreuere Wahrscheinlichkeiten

37
Selbstanpassende Software
Packen in Echtzeit

38
Gliederung Beispielanwendung Systemübersicht der Syntheseprozess
Fehleranalysen Blick in die Zukunft

39
Die Modellumgebung Die Modellumgebung besteht aus: Puma Roboterarm
Fliessband unterschiedlichen geometrischen Objekten Kisten für Objekte Schalter Alarmleuchte

40
Architekturübersicht von SA-CIRCA
Adaptive Mission Planner SA-CIRCA ist die zentrale Komponente Adaptive Mission Planner (AMP) Controller Synthesis Module (CSM) Real Time Subsystem (RTS) Controller Synthesis Module Real Time System Real World
 Controller Synthesis Module (CSM) Real Time Subsystem (RTS) Controller Synthesis Module. Real Time System. Real World.")
41
Adaptive Mission Planner (I)
Der Adaptive Mission Planner (AMP) ist für folgendes zuständig: Analyse von zeitlich längeren Prozessen (im Beispiel betrachtet er den Vorgang vom Teile auf das Band legen bis zum Verpacken) Analyse von Problemstrukturen (Auswahl des geeigneten Verpackungsalgorithmus)
 ist für folgendes zuständig: Analyse von zeitlich längeren Prozessen. (im Beispiel betrachtet er den Vorgang vom Teile auf das Band legen bis zum Verpacken) Analyse von Problemstrukturen. (Auswahl des geeigneten Verpackungsalgorithmus)")
42
Adaptive Mission Planner (II)
AMP Synthesis Control (Negotiation) AMP Problem Konfiguration Controller Synthesis Module Ausführbares TAP Schedule
 AMP. Problem Konfiguration. Controller Synthesis Module. Ausführbares TAP Schedule.")
43
Controller Synthesis Module (I)
Hauptaufgabe des CSM ist das Erstellen von Handlungsplänen. Das CSM ist aus den Komponenten: State Space Planner (SSP) Scheduler TAP Compiler aufgebaut.
 Scheduler. TAP Compiler. aufgebaut.")
44
Controller Synthesis Module (II)
Problem Konfiguration Controller Synthesis Module Planner TAP Compiler Scheduler Ausführbares TAP Schedule

45
SSP – State Space Planner
ist Bestandteil des CSM State Space Planner entwirft Handlungsvorschriften steht in Kommunikation mit dem AMP und RTS Handlungsvorschriften werden vom RTS umgesetzt

46
Scheduler der Scheduler ist Bestandteil vom CSM verwaltet die TAPs
die TAPs werden eingeordnet um vom RTS bearbeitet zu werden

47
Das Real Time Subsystem
ist die Schnittstelle zur realen Welt ist für die Steuerung und Wahrnehmung zuständig Steuerung erfolgt in Hard Realtime führt TAPs aus Controller Synthesis Module Real Time System Real World

48
Transition Description
werden vom Benutzer eingegeben damit wird ein zu steuerndes System beschrieben ein Transition Description definiert Ereignisse um zu einem Endzustand zu kommen. es dient als Grundlage für die Steuerung eines Vorgangs

49
Transition Description - Ereignisarten
Action Transitions: stellen mögliche Aktionen dar, die auch ein Resultat ergeben. Event Transitions: stellen unkontrollierbare und unverzögerbare Ereignisse dar

50
Transition Description - Ereignisarten
Temporal Transitions: sind nicht kontrollierbare Umgebungsprozesse, die sehr kurz sind Reliable Temporal Transitions: stellen Prozesse dar, die garantiert stattfinden werden und etwas Zeit in Anspruch nehmen Goals: beschreiben Zustandsziele

51
Transition Descriptions - Beispiel
Teilmodellierung der Puma-Umgebung EVENT emergency-alert ;; Emergency light goes on. PRECONDS: ((emergency F)) POSTCONDS: ((emergency T)) TEMPORAL emergency-failure ;; Fail if don‘t attend to PRECONDS: ((emergency T)) ;; light by deadline POSTCONDS: ((failure T)) ACTION push-emergency-button ;; Pushing button cancels ;; emerg. PRECONDS: ((part-in-gripper F)) ;; Requires ;;empty gripper POSTCOND: ((emergency F)) WORST-CASE-EXEC-TIME: 2.0 [seconds]
) POSTCONDS: ((emergency T)) TEMPORAL emergency-failure ;; Fail if don‘t attend to. PRECONDS: ((emergency T)) ;; light by deadline. POSTCONDS: ((failure T)) ACTION push-emergency-button ;; Pushing button cancels ;; emerg. PRECONDS: ((part-in-gripper F)) ;; Requires ;;empty gripper. POSTCOND: ((emergency F)) WORST-CASE-EXEC-TIME: 2.0 [seconds]")
52
Erstellen von Handlungsplänen
der SSP generiert aus den Transition Descriptions einen NFA aus dem NFA werden Test Action Pairs (TAPs) erstellt, die vom RTS ausgeführt werden Transition Description NFA TAP wird erstellt
 erstellt, die vom RTS ausgeführt werden. Transition Description. NFA. TAP wird erstellt.")
53
Triggering Tradeoffs ist ein Handlungsplan nicht durchführbar, kommt es zu Triggering Tradeoffs dabei werden Handlungspläne korrigiert

54
Verschiedene Arten von Tradeoffs
Folgende Tradeoffs werden unterschieden: Der SSP findet keinen durchführbaren Handlungsplan Wenn der SSP zu lange braucht, um einen Handlungsplan zu erstellen, kommt es zum Abbruch der Generierungsphase

55
Verschiedene Arten von Tradeoffs
Es wird ein Handlungsplan erstellt, der Scheduler kann dafür aber keinen durchführbaren Handlungsablauf erstellen Der Handlungsplan ist erstellbar, aber das RTS ist nicht leistungsfähig genug Backtracking Real Time System SSP neuer Handlungsplan der SSP muss einen modifizierten Handlungsplan erstellen

56
Erstellen eines neuen Handlungsplans
Der AMP erstellt einen neuen Plan und der CSM generiert daraus einen neuen Handlungsplan. neuer Plan SSP Adaptive Mission Planner neuer Handlungsplan => Die Tradeoffs können durch gewöhnliche Prozeduren ausgeführt werden

57
Ignorieren eines TTF TTF bedeutet Temporal Transition to Failure
TTFs führen zu Fehlern OK Threatened Failure Safe Ein wirkungsvoller Tradeoff ist es Temporal Transitions zu ignorieren

58
Besonderer Effekte beim Ignorieren eines TTF
Beim Ignorieren eines TTFs kann ein Ereignis trotzdem modelliert werden aber: ein möglicher Fehler kann nicht mehr überwacht werden andere mögliche Fehler können bemerkt werden

59
Performanzeffekte durch das Ignorieren eines TTF
wird ein alert/minute Grenzwert überschritten, dürfte nicht mehr gescheduled werden Abhilfe: Eine pickup-part-from-conveyor Aktion wird durch ein if-time TAP modelliert, ohne part-falls-off-conveyor TTF das System bleibt schnell, auch wenn Teile verloren gehen, da ein Herunterfallen der Teile ignoriert wird unter Stressbedingungen bleibt das System leistungsfähig und arbeitet weiter

60
Performanzeffekte durch das Ignorieren eines TTF
Das Systemverhalten nach dem Ignorieren des part-falls-off-conveyor TTF

61
Nichtbeachten eines Event Transition
Vorteile sind: Die Planungszeit wird reduziert Die Anzahl der TAPs wird weniger Das Scheduling wird vereinfacht (durch die Reduzierung der TAPs) => Es erfolgt eine Geschwindigkeitsoptimierung des Systems Nachteil: weggelassene Transitionen werden nicht mehr beachtet
 => Es erfolgt eine Geschwindigkeitsoptimierung des Systems. Nachteil: weggelassene Transitionen werden nicht mehr beachtet.")
62
Die Modifikation eines Action Transitition
Der AMP kann Action Transitions modifizieren Beispiel ist die Veränderung des place-part-in-box Operators Teile können so unterschiedlich schnell und sauber verpackt werden

63
Place-part-in-box Operatoren
Das RTS hat zwei Versionen des place-part-in-box Operators Fine-motion Version Coarse-motion Version

64
Place-part-in-box Operatoren
Fine-motion Version: die Teile können sehr eng zusammengepackt werden benötigt relativ lange Coarse-motion Version schneller schlechter gepackte Kisten

65
Weitere Anwendungen von SA-CIRCA
SA-CIRCA wird in Multi-Aircraft Systemen verwendet dient zur autonomen Steuerung von Flugzeugen

66
Aussichten - der PSSP An der Universität von Michigan wird am Probabilistic State Space Planner (PSSP) gearbeitet es werden wahrscheinlichkeitsbezogene Teilpläne erstellt das RTS ist beschränkender Faktor bereits bei autonomen Flugzeugen getestet

67
Schlußbemerkungen Nachteile selbstanpassender Software:
selbstanpassende Software ist nicht so leicht verständlich wie konventionelle Programme kann man s.S. Dinge wie Lenken von Raketen anvertrauen? Robertson meint ja, denn: Trifft konventionelle Lenksoftware auf Fehler => Totalausfall, während s.S. den Fehler mit größerer Wahrscheinlichkeit auffängt, d.h. s.S. ist robuster

68
Schlußbemerkungen zu entwickeln/erforschen ist noch:
Test- und/oder Beweisverfahren für s.S. => mehr Vertrauen, besseres Verständnis Erforschung der Mächtigkeit/Möglichkeiten selbstanpassender Software

69
Schlußbemerkungen Fazit:
s.S. ist guter vielversprechender Ansatz, der jedoch noch in Kinderschuhen steckt noch viel Forschung in diesem Bereich notwendig, dann ggf. größere Akzeptanz, bisher „Sache des Glaubens“ (Robertson) jedoch: DARPA, Air Force und NASA arbeiten bereits intensiv an Erforschung dieses Ansatzes => gute Zukunftsprognose
 jedoch: DARPA, Air Force und NASA arbeiten bereits intensiv an Erforschung dieses Ansatzes => gute Zukunftsprognose.")
Ähnliche Präsentationen




>")
>")

 U N I V E R S I T Ä T H A M B U R G November 2011.>")
 U N I V E R S I T Ä T H A M B U R G November 2011.>")
Media Landesanstalt für Kommunikation Baden-Württemberg (LFK) Landeszentrale für Medien und Kommunikation.>")




: Umgang mit einfachen Datentypen Umgang mit Feldern Umgang mit Referenzen.>")

>")



