Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Intelligente selbständige Roboter Science Fiction oder Science
Andreas Huemer 2006

2
Anforderungen Lösung von komplexen, nicht monotonen Aufgaben
Einbettung in die reale Welt Einfache, intuitive Kommunikation

3
Einsatz (allgemein) Gefährliche Umgebungen Effizienzsteigerung
Aufgaben, die von Menschen nicht oder schwer durchführbar sind Unterhaltung

4
Einsatzgebiete Katastropheneinsatz Suche nach Überlebenden
Versorgung von Opfern Bergung Unterstützung der Einsatzkräfte

5
Einsatzgebiete Expeditionen Arbeit und Haushalt Exekutive und Militär
Unterhaltung

6
Forschungsbereiche Roboterkörper Sensorik Motorik Steuerung
Energieversorgung

7
Steuerung Intelligentes Verhalten Anpassungsfähigkeit Entwicklung

8
Intelligentes Verhalten durch künstliche neuronale Netze
Biologisches Gehirn als Vorlage Verteiltes Wissen: Neuronen und Synapsen Spiking Struktur Vom Sensor zum Motor „Funktionen“ und „Unterfunktionen“

9
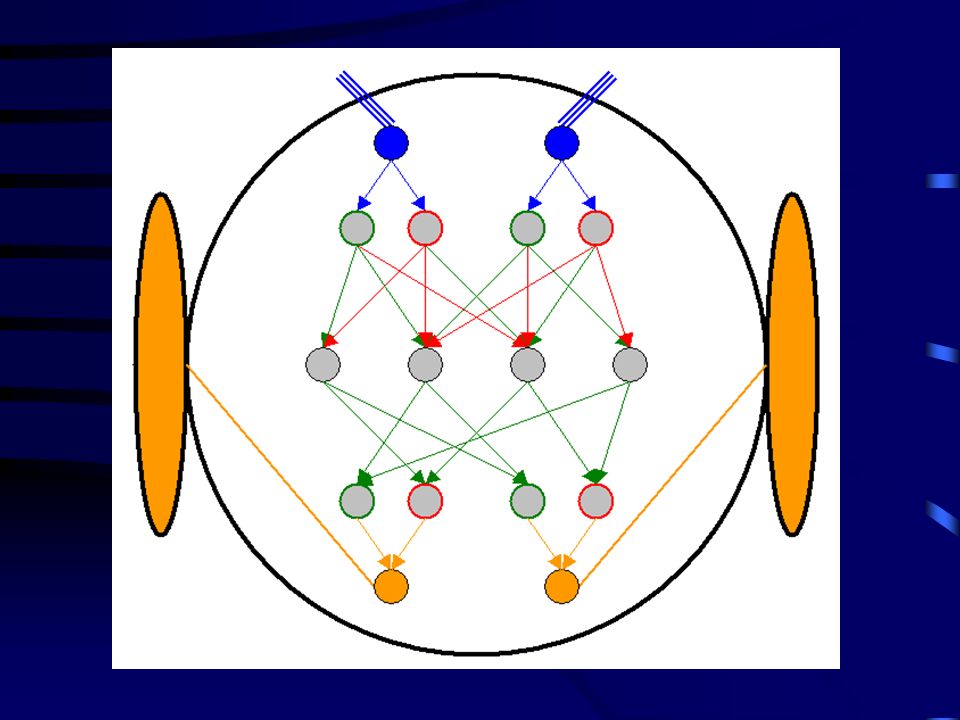
Ein einfaches neuronales Netz
Aufbau Funktionsweise Simulation

11
Ein einfaches neuronales Netz
Aufbau Funktionsweise Simulation

12
Anpassungsfähigkeit durch fehlende starre Programmierung
Vielseitige Reaktionsmöglichkeiten auf sensorische Eingaben Neuronen und Verbindungen können sich laufend ändern

13
Entwicklung durch Lernen und Selbstorganisation
Intelligenz kann mit der Zeit entstehen Aufbau des künstlichen Gehirns durch Selbstorganisation Aus Erfahrungen lernen

14
Selbstorganisation der neuronalen Verbindungen
Häufig gemeinsam verwendete Verbindungen werden gestärkt Hebbsches Lernen Entstehung von neuronalen Karten

15
Beispiel einer neuronalen Karte

16
Lernen durch Belohnung und Bestrafung
positives oder negatives Feedback über spezielle Sensoren – Reinforcement Learning Internes Feedback – Gesundheitszustand Externes Feedback – Bewertung durch Lehrer – Supervised Learning

17
Neue integrierte Lernmethode
„Feedback-Kerne“ („Reinforcement units“)
")
18
Funktionsweise – Schritt 1

19
Funktionsweise – Schritt 2

20
Funktionsweise – Schritt 3

21
Funktionsweise – Schritt 4

22
Funktionsweise – Schritt 5

23
Funktionsweise – Schritt 6

24
Wichtige Vorteile gegenüber existierenden Lernmethoden
Lernen ist direkt in das neuronale Netz integriert Lernen kann während der Laufzeit erfolgen Feedback ist direkt mit der Aktion verbunden, die es verursacht hat Nur Teile des neuronalen Netzes müssen angepasst werden Zeitabhängige Vorhersagen sind möglich

25
Zu beachten Die komplexen Prozesse im neuronalen Netz sind schwer zu überwachen Die vorgeschlagenen Methoden müssen erst getestet werden

26
Wachstum des Gehirns Selbstorganisation der Neuronen
Basisgehirn mit bestimmten Wachstumseigenschaften Steuerungsmöglichkeiten durch Festlegung bestimmter Prozeduren Evolutionäre Methoden

27
Hardwareprobleme Viele eher einfache, parallel laufende Prozessoren werden statt einem hochkomplexen benötigt Dynamische Änderungen der Hardware sind schwer möglich

28
Zusammenfassung Viele Einsatzgebiete
Neuronale Netze – flexible Steuerung Ständige Anpassung und Verbesserung auch während Laufzeit möglich Noch viel Entwicklungsarbeit notwendig Aber: Science, nicht Science Fiction

29
Herzlichen Dank! Andreas

Ähnliche Präsentationen