Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Technologie- und Innovationsmanagement
Begriffe Produkt und Prozess Unterschiedliche Interessen und Anspruchsniveaus Fehler und ihre Folgen Störfaktor Mensch ...und wann machst Du eine Erfindung ? Oder ist schon alles erfunden ? 1886: Carl Benz Patent-Motorwagen Nummer 1 (Quelle: DaimlerChrysler AG)
")
2
Begriff Technologie Technik:
Nutzanwendung naturwissenschaftlicher Gesetze, Ingenieurwissenschaften, Kunstfertigkeit Technologie: Wissenschaft der naturwissenschaftlichen Verfahrensweisen Im Sprachgebrauch oft dem Begriff „Technik“ gleichgestellt

3
Begriff Innovation In marktwirtschaftlichen Systemen muss jedes Unternehmen bei Aktionen am Markt mit Mitbewerbern rechnen. Lieferanten und Kunden haben weitgehende Handlungsfreiheit. Ihre Interaktionen führen zum ständigen Modernisierungszwang (Produkte, Prozesse, Qualifikation der Mitarbeiter) – Innovationszwang – Skizzieren Sie das Marktgeschehen! Wie lässt sich „Innovation“ grafisch darstellen?
 – Innovationszwang – Skizzieren Sie das Marktgeschehen! Wie lässt sich „Innovation grafisch darstellen")
4
Juran – Ansatz Identifiziere die Kunden und ihre Bedürfnisse
Entwickle ein Produkt, das diese Bedürfnisse erfüllt. Entwickle einen Prozess, der fähig ist, dieses Produkt zu erzeugen.

5
Produkt- und Prozessqualität
Qualität: Beschaffenheit einer Einheit bezüglich ihrer Eignung, festgelegte und vorausgesetzte Erfordernisse zu erfüllen. (DIN 55350) Definition in einem Wort: Skizzieren Sie nach dieser Definition ein einfaches „Messgerät“ für Qualität! Skizzieren Sie ein entsprechendes einfaches Modell für Produkt- und Prozessqualität!
 Definition in einem Wort: Skizzieren Sie nach dieser Definition ein einfaches „Messgerät für Qualität! Skizzieren Sie ein entsprechendes einfaches Modell für Produkt- und Prozessqualität!")
6
Begriff Zuverlässigkeit
Zuverlässigkeit (eines Produkts): Qualität unter vorgegebenen Anwendungsbedingungen während oder nach einer vorgegeben Zeit (DIN 55350) Oder: Über die Zeit erstreckte Qualität Oder: Überlebenswahrscheinlichkeit bei bestimmungsgemäßem Gebrauch
: Qualität unter vorgegebenen Anwendungsbedingungen während oder nach einer vorgegeben Zeit (DIN 55350) Oder: Über die Zeit erstreckte Qualität. Oder: Überlebenswahrscheinlichkeit bei bestimmungsgemäßem Gebrauch.")
7
Unterschiedliche Interessen
Verbraucher Hersteller Allgemeinheit Zweckeignung Zuverlässigkeit Termintreue Service Preiswürdigkeit Marktakzeptanz Produktivität Geringes Risiko bei Garantie und Produkthaftpflicht Gewinn Gefahrenbegrenzung Umweltverträglichkeit Ressourcenschonung Soziale Aspekte

8
Wertfunktion der Qualität
Das endgültige Urteil über ein Produkt fällt der Kunde – er muss einen Nutzen haben. Untererfüllung der Erfordernisse wird hart bestraft – Übererfüllung nur kärglich belohnt. Skizzieren Sie die Wertfunktion für das Kriterium „Festigkeit“ für eine Wäscheleine und ein Bergseil!

9
Anspruchsniveaus Anspruchs- niveau Rangfolge Beispiel Preis Zahl
Sterne hoch 1 **** Prestige mittel 2 ** Standard bescheiden 3 * economy tief Beispiel für die Rangfolge von Anspruchsniveaus

10
Qualitätskreis (DIN 55350) Planung
Marktforschung, Konzept, Entwurf, Fertigungsplanung Realisierung Beschaffung, Fertigung, Prüfung, Lagerung, Versand Nutzung Instandhaltung, Service, Entsorgung Erfahrungen aus der Nutzung müssen in neue Konzepte einfließen.

11
Fehlererkennung Fehler vermeiden ist billiger als als Fehler machen,
suchen, finden und beseitigen. Skizzieren Sie Kosten einer Änderung in der Planung, der Fertigung und nach dem Verkauf !

12
Produkthaftung – ProdHaftG
§1(1): „Wird durch den Fehler ... jemand getötet, ... verletzt ... oder eine Sache beschädigt, so ist der Hersteller ... verpflichtet, ... den Schaden zu ersetzen.“ §1(2): „Ersatzhaftpflicht ... Ist ausgeschlossen, wenn ... der Fehler nach dem Stand der Wissenschaft und Technik ... nicht erkannt werden konnte.“
: „Wird durch den Fehler ... jemand getötet, ... verletzt ... oder eine Sache beschädigt, so ist der Hersteller ... verpflichtet, ... den Schaden zu ersetzen. §1(2): „Ersatzhaftpflicht ... Ist ausgeschlossen, wenn ... der Fehler nach dem Stand der Wissenschaft und Technik ... nicht erkannt werden konnte.")
13
Folgen fehlerhafter Produkte
Nicht rechtlich: Wirtschaftliche Verluste (Umsatz, Marktstellung, Image) Zivilrechtlich: Gewährleistung (Nachbesserung, Minderung, Wandlung) Produkthaftung Strafrechtlich: Geldstrafe, Freiheitsstrafe
 Zivilrechtlich: Gewährleistung (Nachbesserung, Minderung, Wandlung) Produkthaftung. Strafrechtlich: Geldstrafe, Freiheitsstrafe.")
14
Schlussfolgerungen für das Unternehmen
Fehlerverhütung (FMEA, Six Sigma, ... ) QM – System Interne und Lieferantenaudits Qualifikation der Mitarbeiter Beachtung gängiger Normen (ISO, EN, DIN, VDI, VDE ...) Haftpflichtversicherung
 QM – System. Interne und Lieferantenaudits. Qualifikation der Mitarbeiter. Beachtung gängiger Normen (ISO, EN, DIN, VDI, VDE ...) Haftpflichtversicherung.")
15
Mensch und Job – 4 Phasen der Demotivierung
1. Begeisterung: alles schön 2. Ernüchterung: Kommunikationsstörung, „isolierter Fleiß“, Ausweg: klärendes Gespräch 3. Katastrophe: Kommunikationsverweigerung, Aggressivität, schwindende Leistungslust, Ausweg: gemeinsames Gespräch bei höherem Vorgesetzten 4. Verweigerung: (zwei Varianten möglich) Kündigung „Dienst nach Vorschrift“ Wie verhindert man Demotivierung ?
 Kündigung. „Dienst nach Vorschrift Wie verhindert man Demotivierung")
16
Einsatz von Industrierobotern

17
Überblick Handhabetechnik
mit fester Hauptfunktion und damit mit variabler Funktion unflexibel (z.B. starre Automaten) manuell gesteuert (Teleoperatoren, programmgesteuerte Manipulatoren) Bewegungsautomaten Fest programmierbar einfaches Handhabegerät, Einlegegerät, pick and place Frei programmierbar, (echter) Industrieroboter
 manuell gesteuert (Teleoperatoren, programmgesteuerte. Manipulatoren) Bewegungsautomaten. Fest programmierbar. einfaches Handhabegerät, Einlegegerät, pick and place. Frei programmierbar, (echter) Industrieroboter.")
18
Vergleich Einlegegerät und Roboter
Einlegegerät (pick & place) Industrieroboter fest programmierbar frei programmierbar preiswert (ca. 1/10 …1/2 IR) …100000€ einfache Antriebe (z.B. Pneumatik) Servoantriebe große Stückzahlen Kleinserien, mittlere Stückzahlen begrenzter Aufgabenbereich universeller Einsatz relativ hoher Umrüstaufwand Aufgabenwechsel ohne menschliche Einwirkung Geringe Flexibilität hohe Flexibilität
 Industrieroboter. fest programmierbar. frei programmierbar. preiswert (ca. 1/10 …1/2 IR) …100000€ einfache Antriebe (z.B. Pneumatik) Servoantriebe. große Stückzahlen. Kleinserien, mittlere Stückzahlen. begrenzter Aufgabenbereich. universeller Einsatz. relativ hoher Umrüstaufwand. Aufgabenwechsel ohne menschliche Einwirkung. Geringe Flexibilität. hohe Flexibilität.")
19
Roboterdefinition Industrieroboter sind universell einsetzbare Bewegungsautomaten mit mehreren Achsen, frei programmierbar, ggf. sensorgeführt, mit Greifern o.a. ausrüstbar und können Handhabungs- und/oder Fertigungsaufgaben ausführen. (VDI 2860)
")
20
Was können Roboter in 20 Jahren ??
Generationsbegriff Die Generationen existieren parallel, lösen sich nicht ab. 1.Generation keine Anpassung determinierte Umwelt „blind – taub – gefühllos“ 2.Generation Passen sich gewissen, also vorprogrammierten Änderungen der Umwelt selbsttätig an. Sensorgeführte Roboter 3.Generation Noch bessere Anpassungsfähigkeit, Kommunikation, Mobilität, Handlungsplanung, Künstliche Intelligenz Was können Roboter in 20 Jahren ??

21
Wie sehen Roboter heute aus ?
Vorbild: menschlicher Arm große Beweglichkeit universeller Einsatz (Handling, Schweißen, Farbspritzen, technologische Roboter, Montage) Gelenkarmkonfiguration (jointed-arm robot)
 Gelenkarmkonfiguration (jointed-arm robot)")
22
SCARA – Roboter (scara robot)
SCARA: Selectiv Compliance Assembly Robot Arm Montageroboter mit gesteuerter Nachgiebigkeit Kann ohne den Einsatz taktiler Sensoren Versatz der Fügepartner ausgleichen. In den Hauptachsen keine Bewegungen entgegen der Schwerkraft. – Scara`s sind in der Praxis ziemlich flink. Einsatz: Senkrechte Montage kleiner Teile Palettieraufgaben Sortieraufgaben SCARA – Roboter (scara robot)
")
23
Schubachsenroboter (linear robot)
Zwei Einsatzgebiete: Wegen der hohen Genauigkeit als Messroboter Wegen des großen Arbeitsraums als Palettier- und Handlingroboter Schubachsenroboter (linear robot)
")
24
Roboter mit Parallelantrieben (delta robot)
Einsatz: Wenn es schnell gehen muss Sortieraufgaben Technologische Roboter großes Potential Besondere Konstruktion: Drei Rotationsachsen mit je einer Parallelführung Roboter mit Parallelantrieben (delta robot)
")
25
Effektoren für Roboter
Effektoren führen die eigentliche Handhabeaufgabe aus. Sie müssen extra nachgerüstet werden. Wir unterscheiden Greifer und Werkzeuge, die in großer Vielfalt angeboten werden.(Welche Vorteile bringt ein Doppelgreifer?) Die Steuerung bewegt den Tool Center Point (TCP)
 Die Steuerung bewegt den Tool Center Point (TCP)")
26
Wie werden Roboter programmiert ?
Man unterscheidet hier drei Steuerungsfunktionen : Punkt zu Punkt (PTP: point to point) Bahnsteuerung (CP: continous path) Vielpunktsteuerung (MP: multi point)
 Bahnsteuerung (CP: continous path) Vielpunktsteuerung (MP: multi point)")
27
Indirektes teach in Handbediengerät mit Richtungstasten oder Joystick

28
Direktes teach in Programmierhebel mit FM - Sensorik

29
Regelkreis Kinematik Jede Roboterachse hat einen eigenen Regelkreis

30
Wie bewegt sich ein Roboter ?
Der errechnete Sollwert wird mit dem vom Messsystem ermittelten Istwert verglichen. (Soll - Ist – Vergleich) Aus einer Rampenfunktion ergeben sich Geschwindigkeitsvorgaben. Die Servoeinheit (z.B. Pulsumrichter) regelt den Strom für den Servomotor (z.B. Drehstrom-Asynchronmotor), der im 4-Quadranten-Betrieb laufen muss. Der Sollwert gilt als erreicht, wenn der Koizidenzbereich tangiert wird. Typisch für heutige Roboter sind harmonic drive Getriebe (Die gekennzeichneten Begriffe werden im Seminar geklärt.)
 Aus einer Rampenfunktion ergeben sich Geschwindigkeitsvorgaben. Die Servoeinheit (z.B. Pulsumrichter) regelt den Strom für den Servomotor (z.B. Drehstrom-Asynchronmotor), der im 4-Quadranten-Betrieb laufen muss. Der Sollwert gilt als erreicht, wenn der Koizidenzbereich tangiert wird. Typisch für heutige Roboter sind harmonic drive Getriebe. (Die gekennzeichneten Begriffe werden im Seminar geklärt.)")
31
Welche Aspekte muss der Ingenieur bei der Automatisierung beachten ?
Drei Hauptgründe: 1. Qualität Humanisierung Kostendruck

32
Beispiel „billige“ Schraube
Vorher: Fehleranteil 0,2% Kosten € 50,00 für 1000 Stück Neues Billigangebot: Fehleranteil 3 % Kosten € 10,00 für 1000 Stück Kostensätze für den Automatikschrauber: Leistung: max, 1000 Schrauben pro Stunde Stillstand bei Störung: 3 Minuten Kosten: € 120,00 pro Stunde Wie viel Geld spart unsere Beispielfirma pro 1 Million Verschraubungen?

33
Für 1000 Verschraubungen erforderliche:
Fehler-anteil Für 1000 Verschraubungen erforderliche: Zeit Kosten 0,2% 3% „Eingespart“ bei 1000 Verschraubungen: Und bei 1 Million Verschraubungen:

34
Montageroboter Montagebewegungen
Grobpositionierung erledigt der Roboter mit bestimmter Genauigkeit Feinbewegungen zum Ausgleich von Schrägstellung und Versatz Passive RCC verformen sich durch Reaktionskräfte und Reaktionsmomente. Aktive RCC erfassen Reaktionskräfte und Reaktionsmomente sensorisch.

35
Toleranzen und Passungen I

36
Toleranzen und Passungen II

37
Ziel: Toleranzfeldmitte!
Unter welchen Umständen kann anstelle der Maximum-Minimum-Methode die innovative statistische Tolerierung treten? Rechenübung statistische Tolerierung Welche Vorteile ergeben sich?

38
Wie „sieht“ ein Roboter ?
CCD- Kamera Kamera-Software mit: Vorverarbeitung Vektorisierung Merkmalsreduktion Bildauswertung Bilddaten Steuerung Industrieroboter Visuelles Erkennungssystem

39
CCD – Kameras Für Fotos Zur Überwachung Zur Bildverarbeitung

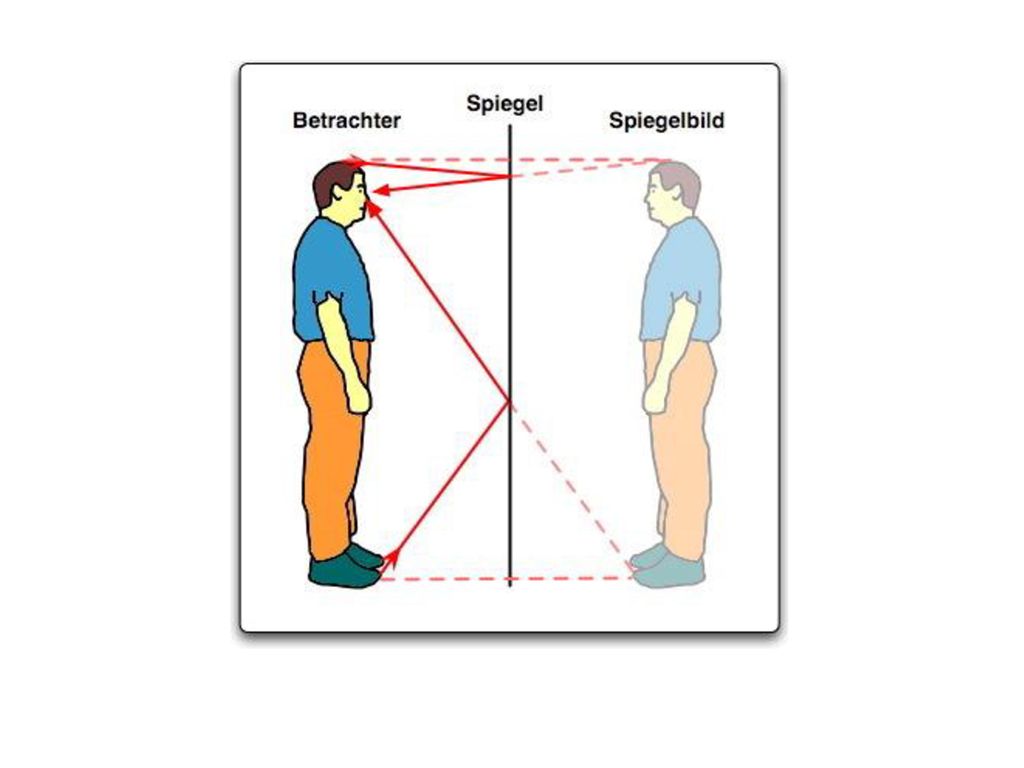
40
Bildentstehung Kamera: (geometrisch-optisches Auflösungsvermögen) → Schärfeanpassung: Entfernung groß mehrere, verschiebbare Linsen Objektiv CCD Chip F’ F Warum vertauscht der Spiegel nicht auch oben und unten ?

42
CCD – Chip

43
3 – Chip – Kameras

44
Leserate und Wirtschaftlichkeit
Wir stellen uns eine Paketsortieranlage mit einer Leistung von 1,6 Paketen pro Sekunde bei 22 täglichen Betriebsstunden und 350 Produktionstagen vor. Erfolgt ein fehlerhafter Lesevorgang an einem Paket, muss es ausgeschleust und manuell nachbearbeitet werden. Zeitaufwand dazu: 1,5 Minuten bei einem Stundenlohn von 12 €. Ein € teures innovatives Barcode-Lesegerät verbessert die Leserate von 99% auf 99,9%. Sind die € sinnvoll angelegt? (nach K. Weiß, Computer&Automation, )
")
45
(Foto: Cognex)
")
46
Lichtwellenleiter und faseroptische Sensoren
(Bild: Keyence)
")
47
Sensorischer Regelkreis
Rückwirkung Xe: Eingangsgröße, Erfassungsaufgabe X*e: umgeformte Größe z.B. Kraft Dehnung; Lichtquant Ladung Y: Stellgröße Ein Sensor wandelt physikalische Größen in brauchbare, (elektrische) Signale um. Sensorsystem Sensor Xe X*e Wandler elektr. Signal Aufnehmer Verstärker Signal- vorverarbeitung Stelleinrichtung Aktor Steuerung Soll-Ist-Vergleich Y
 Signale um. Sensorsystem. Sensor. Xe. X*e. Wandler. elektr. Signal. Aufnehmer. Verstärker. Signal- vorverarbeitung. Stelleinrichtung. Aktor. Steuerung. Soll-Ist-Vergleich. Y.")
48
Vergleich Sensor und Messgerät
Vergleichskriterium moderner Sensor klassische Messmittel Wer wertet die Signale aus? Steuerung Mensch Kosten gering weniger entscheidend Signalpegel uninteressant möglichst hoch Störsicherheit / Nichtlinearität Computer kompensiert Schwankungen entscheidende Größen (Messraumklima) Integrationsfähigkeit sehr erwünscht nicht sinnvoll aber möglich Digitalisierbarkeit entscheidend möglich
 Integrationsfähigkeit. sehr erwünscht. nicht sinnvoll aber möglich. Digitalisierbarkeit. entscheidend. möglich.")
49
Sensoren und Automatisierung
Sensor Steuerung Aktor Eingabe Verarbeitung Ausgabe Aufgabe: Bereitstellung von Signalen logische Verknüpfung Schaltzustände, Anzeigen, Bewegungen, Energiewandlung Beispiel: Taster, Initiatoren, Lichtschranke, Kamera SPS, CNC, Robotersteuerung, Prozessrechner Relais, Pulsumrichter, Magnet, Drucker, Hydraulikventil, Piezoaktor

50
Induktive Initiatoren und Sensoren

51
Kapazitive Initiatoren und Sensoren

52
Magnetische Initiatoren
Hallgenerator

53
Ultraschallsensoren

54
Zuverlässigkeit Kurzdefinition: Überlebenswahrscheinlichkeit bei bestimmungsgemäßem Gebrauch. Zufallsausfälle, typisch in der Elektrotechnik, werden mit der Exponentialverteilung mathematisch modelliert. Verschleißbedingte Ausfälle, typisch im Fahrzeug- und Maschinenbau, werden mit der Weibullverteilung mathematisch modelliert.

55
Begriffe Reliability R(t): Überlebenswahrscheinlichkeit
Failure F(t): Ausfallwahrscheinlichkeit, F(t)=1- R(t), F(t) + R(t) = 1 statistischer Parameter t: Zeit, Anzahl, ... Ausfallrate λ(t): Ausfallwahrscheinlichkeit im nächsten Intervall Für nicht instandsetzbare Einheiten: TTF: Time to failure - Lebensdauer MTTF: mean time to failure – mittlere Lebensdauer Für instandsetzbare Einheiten: MTBF: mean time between failure – mittlere Zeit zwischen Instandsetzungen MTTR: mean time to repair – mittlere Dauer der Instandsetzung
: Ausfallwahrscheinlichkeit, F(t)=1- R(t), F(t) + R(t) = 1. statistischer Parameter t: Zeit, Anzahl, ... Ausfallrate λ(t): Ausfallwahrscheinlichkeit im nächsten Intervall. Für nicht instandsetzbare Einheiten: TTF: Time to failure - Lebensdauer. MTTF: mean time to failure – mittlere Lebensdauer. Für instandsetzbare Einheiten: MTBF: mean time between failure – mittlere Zeit zwischen Instandsetzungen. MTTR: mean time to repair – mittlere Dauer der Instandsetzung.")
56
Exponentialverteilung
Skizzieren Sie F(t), R(t), λ(t) ! Wie wird der Schätzwert für die Ausfallrate ermittelt? 1.Beispiel: 50000 elektronische Bauelemente (BE) werden in einem Lebensdauerversuch getestet. Nach Stunden sind 5 BE ausgefallen. Wie viele BE werden 4 Jahre Dauerbetrieb überleben?
, R(t), λ(t) ! Wie wird der Schätzwert für die Ausfallrate ermittelt 1.Beispiel: elektronische Bauelemente (BE) werden in einem Lebensdauerversuch getestet. Nach Stunden sind 5 BE ausgefallen. Wie viele BE werden 4 Jahre Dauerbetrieb überleben")
57
2. Beispiel: Wie viel % der Einheiten überleben die charakteristische Lebensdauer tm ? 3. Beispiel: Ein Hochschulmitarbeiter wird durchschnittlich alle 5 Minuten durch den zufälligen Besuch eines Studenten, eines Kollegen oder einen Anruf gestört. – Wie groß ist die Chance für 15 Minuten ungestörtes Arbeiten ?

58
Weibullverteilung Waloddi Weibull: schwedischer Ingenieur
Für Verschleißausfälle: Ausfallrate λ ist nicht konstant b: Formparameter b<1: Ausfallrate λ sinkt (Frühausfälle) b=1: Ausfallrate λ ist konstant (Zufallsausfälle) b>1: Ausfallrate λ steigt (Verschleißausfälle)
 b=1: Ausfallrate λ ist konstant (Zufallsausfälle) b>1: Ausfallrate λ steigt (Verschleißausfälle)")
59
4. Beispiel: Es werden 2000 Ventile ausgeliefert. Es ist bekannt, das Ventile dieses Typs eine charakteristische Lebensdauer von 4,5 Jahren und einen Formparameter von 2 haben. - Berechnen Sie den Bestand nach 2 Jahren. 6. Beispiel Innerhalb des Garantiezeitraums von 1 Jahr fallen bei Getrieben eines bestimmten Typs 0,5% aus. Es gilt ein Formparameter b=2. Der Garantiezeitraum soll in einer Marketing – Aktion auf 3 Jahre ausgedehnt werden. Mit welchem Anteil von Garantieausfällen ist zu rechnen?

60
Wohin entwickelt sich die Produktionstechnik ?
Zur Herstellung eines simplen Kugelschreibers ist momentan eine ungeheure Industrie mit Bergbau, Metallurgie, Erdölförderung, Chemie, Fertigung, Montage sowie Logistik erforderlich. Wer findet die Möglichkeit, Dinge aus ihren Grundbausteinen, nämlich Atomen und Molekülen, direkt aufzubauen?

Ähnliche Präsentationen









 qFall: „ Fliegendes“ Messer aus Rasenmäher tötet Frau qAnwendungsbereich: Gewerbe, Industrie; Arzneimittel.>")




 wünschen sich die Möglichkeit und Flexibilität,>")




