Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Wie findet ein Roboter den Weg aus einem Labyrinth?
ROBOTIK FHBB Fachhochschule Beider Basel Wie findet ein Roboter den Weg aus einem Labyrinth? Von Florian Gysin und Silas Kull

2
Arbeitsvorgänge Wie können wir einem Roboter Befehle geben?
Was sind unsere Hilfsmittel? Wie steuern wir die Sensoren und Motoren des Roboters an? Wie soll der Roboter im Labyrinth vorgehen? Mit welchen Situationen wird der Roboter im Labyrinth konfrontiert? Wie sind diese logisch zu bewältigen? Was waren unsere Probleme?

3
Wie können wir einem Roboter Befehle geben?
PINs ansteuern (binär) LOW/HIGH PULS
 LOW/HIGH. PULS.")
4
Was sind unsere Hilfsmittel?
Auf dem Computer: BASIC STAMP 2 Auf dem Roboter: Infrarot-Sensoren Schrittmotoren

5
Wie steuern wir die Sensoren des Roboters an?
Input auf LOW -> Messung Ergebnisse binär mit Pulsen beim Output abholen Sensoren eichen

6
Wie steuern wir die Motoren des Roboters an?
Jeder Motor separat ansteuerbar PIN für Schritte PIN für Richtung Pulse auf Schritt-PIN -> Fahren

7
Wie soll der Roboter im Labyrinth vorgehen?
Zufall (kleine Chance) Labyrinth in Memory abspeichern (speicheraufwändig) Immer einer Wand nachfahren (zeitaufwändig und u.U. unlösbar) -> welches ist die beste Umsetzung für unseren Roboter?
 Labyrinth in Memory abspeichern (speicheraufwändig) Immer einer Wand nachfahren (zeitaufwändig und u.U. unlösbar) -> welches ist die beste Umsetzung für unseren Roboter")
8
Die Normalfunktionen:
Distanz mit Sensoren messen Ausrichten (parallel zur Wand) Ausrichten (konstanter Abstand zur Wand) Wenn kein Spezialfall: geradeaus Fahren
 Ausrichten (konstanter Abstand zur Wand) Wenn kein Spezialfall: geradeaus Fahren.")
9
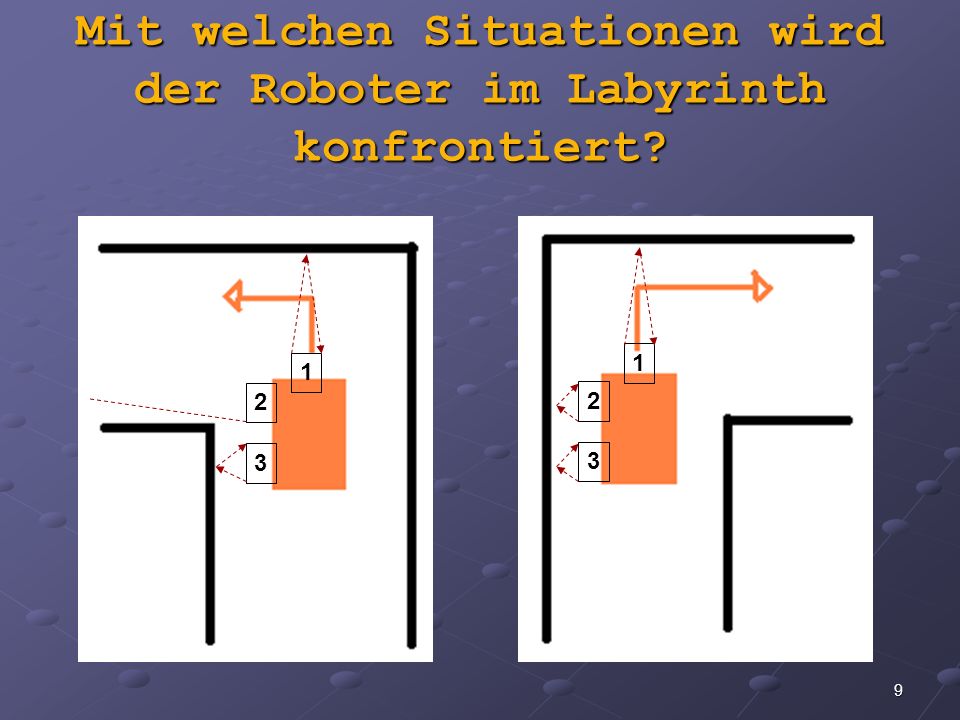
Mit welchen Situationen wird der Roboter im Labyrinth konfrontiert?
1 1 2 2 3 3
10
Wie sind diese Situationen logisch zu bewältigen?
Sensor 2 sieht keine Wand mehr Roboter fährt vorwärts, dreht nach links ab, fährt nochmals vorwärts -> wieder eine Wand sichtbar 1 2 3 Sensor 1 sieht Wand vor sich Roboter dreht nach rechts ab Wiederum normale Funktionen 1 2 3

11
Welche Probleme gab es zu bewältigen?
Roboteraufbau verstehen Sensor-Timing Sensorungenauigkeit Störanfälligkeit bei (Infrarot-) Strahlung, Bodenbeschaffenheit usw. Sehr simple Programmiersprache
 Strahlung, Bodenbeschaffenheit usw. Sehr simple Programmiersprache.")
12
Dies war eine Präsentation von Florian Gysin und Silas Kull
Wir danken der Stiftung Schweizer-Jugend-Forscht und insbesondere der Organisatorin Corinne Scacchi für dieses interessante Projekt und unseren Betreuern Andreas Kiebele und Radolf von Salis für die professionelle Einleitung in das Thema Robotik. Wir danken auch der Fachhochschule Beider Basel, die uns den Roboter zur Verfügung gestellt hat.

Ähnliche Präsentationen



>")












 Ein Unterrichtsprojekt mit Computer und Internet Klickt nun bitte weiter auf Einführung.Einführung Einführung Aufgabe Schritte.>")


