Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Optimierung von Arbeitsroboterbewegungen
GEOMETRIE Optimierung von Arbeitsroboterbewegungen

2
DAS TEAM Markus Freilinger, Matthias Kalkgruber, Thomas Gschwandtner, Margot Oberneder, Johannes Wendtner, Markus Holzmann, Thomas Lettner, Claudio Harringer, Valentin Hofer, Harald Hinterleitner

3
AUFGABENSTELLUNG Ein Roboterarm soll mithilfe von 2 Gelenken von einem Start- zu einem Zielpunkt bewegt werden und dabei Hindernissen ausweichen

4
ARBEITSBEREICH Wohin können die Roboterarme bewegt werden? r2 45° r2

5
ALPHA- BETA EBENE Hindernisse werden in eine Alpha- Beta Ebene übertragen β 180° β α 180° α

6
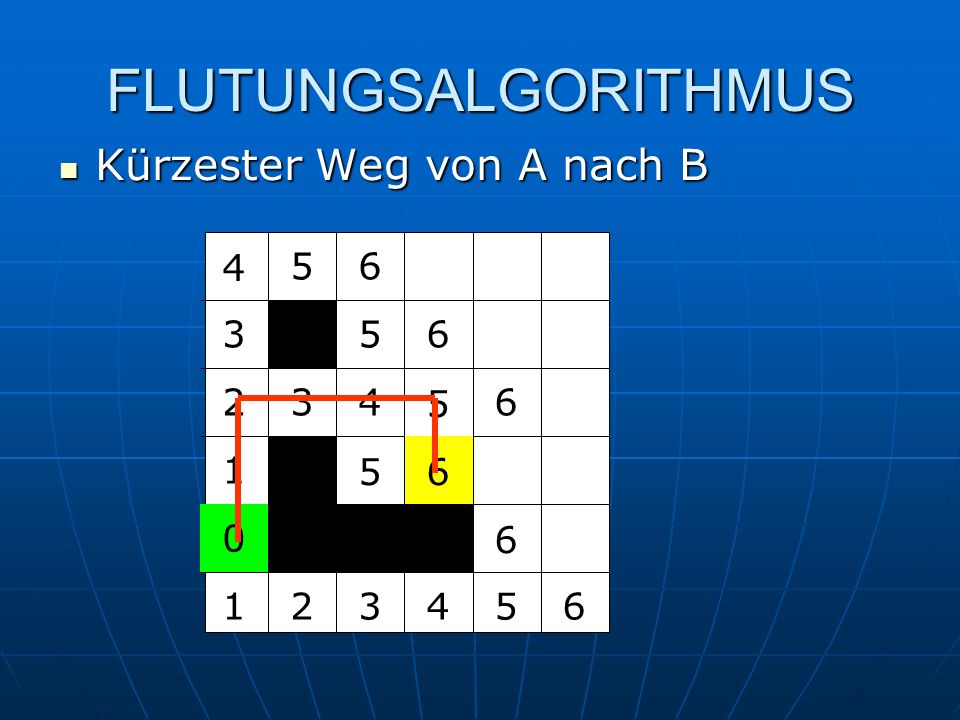
FLUTUNGSALGORITHMUS Kürzester Weg von A nach B 4 5 6 3 5 6 2 3 4 5 6 1
6 1 2 3 4 5 6
7
ANIMATION

8
Verwendete Programme C : α-β Ebene Flutungsalgorithmus kürzester Pfad
Mathematica: α-β Ebene Flutungsalgorithmus kürzester Pfad Animation der Bewegung

9
BEI DER ARBEIT...

10
VIELEN DANK FÜR IHRE AUFMERKSAMKEIT

Ähnliche Präsentationen



















