Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Geoinformationssysteme
Geoinformationssysteme - Vorlesung FH Koblenz Geoinformationssysteme Prof. Dr. Stefan Hawlitschka

2
Themen Bayes‘sche Entscheidungstheorie Maximum Likelihood Schätzer
Maximum a Posteriori Schätzer Geoinformationssysteme - Vorlesung FH Koblenz

3
Bayes‘sche Entscheidungstheorie
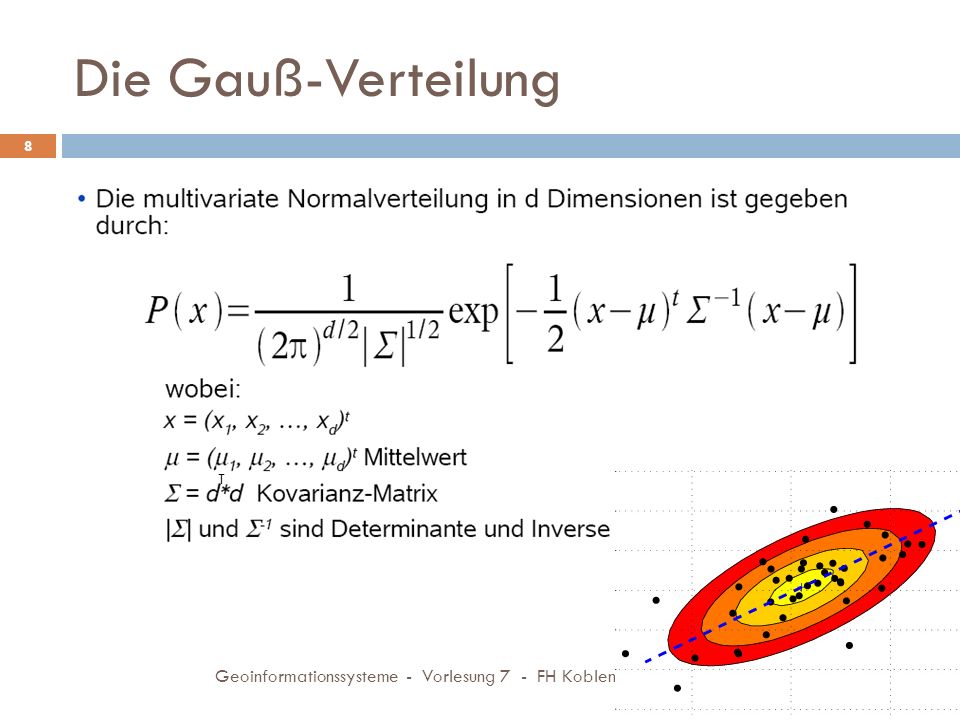
Kontinuierliche Variablen Wir betrachten mehrere Merkmale mit Merkmalsvektor x im euklidischen Raum Rd. Wir lassen mehr als zwei Klassen zu Die Einführung einer Kostenfunktion ermöglicht, bestimmte Fehlklassifizierungen als schwerwiegender zu bewerten als andere Wir hatten die a posteriori Wahrscheinlichkeit durch die Regel von Bayes definiert: Likelihood A priori Geoinformationssysteme - Vorlesung FH Koblenz

4
Bayes‘sche Entscheidungstheorie
Wie konstruieren wir die Wahrscheinlichkeitsfunktionen? Beispiel für a priori Wahrscheinlichkeit: wie oft kommt jede Klasse in einer Stichprobe vor (empirische Häufigkeit)? Beispiel für Likelihood: empirische Helligkeitsverteilung p(x|) Daten (Beobachtungen) Empirische Verteilung Geoinformationssysteme - Vorlesung FH Koblenz
 Beispiel für Likelihood: empirische Helligkeitsverteilung p(x|) Daten (Beobachtungen) Empirische Verteilung. Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
5
Bayes‘sche Entscheidungstheorie
Das Auszählen der Klassenhäufigkeiten liefert meist eine gute Approximation des wahren Priors. Problem: Die empirische Verteilung ist meist eine schlechte Approximation der Likelihood. Es existieren zu wenige Beobachtungen, um insbesondere hochdimensionale Verteilungen zu schätzen Ansatz: Modellannahmen geben zusätzliche Information zur Struktur des Problems, bzw. der Form der Likelihood. Beispiel: Daten D={x1,…,xk} Helligkeit des Seeteufels. Wir suchen die Verteilung der Zufallsvariablen X. Geoinformationssysteme - Vorlesung FH Koblenz

6
Bayes‘sche Entscheidungstheorie
tatsächliche Dichte von X empirische Dichtefunktion „gelernte“ Dichtefunktion Parameterschätzung (ML): Mittelwert = 179 Standardabw. = 9.5 Modellannahme: X ist eine normalverteilte Zufallsvariable N(μ,σ2) Geoinformationssysteme - Vorlesung FH Koblenz
: Mittelwert = 179. Standardabw. = 9.5. Modellannahme: X ist eine normalverteilte Zufallsvariable N(μ,σ2) Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
7
Die Gauß (Normal-) Verteilung
Geoinformationssysteme - Vorlesung FH Koblenz

8
Die Gauß-Verteilung Geoinformationssysteme - Vorlesung 7 - FH Koblenz
9
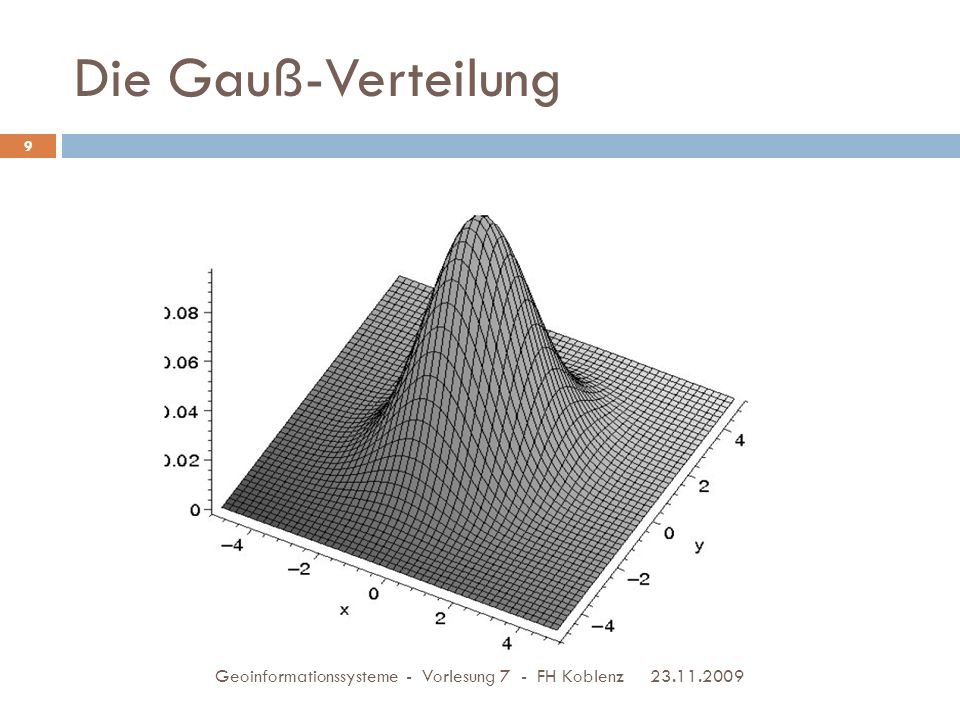
Die Gauß-Verteilung Geoinformationssysteme - Vorlesung 7 - FH Koblenz
10
Bayes‘sche Entscheidungstheorie
Geoinformationssysteme - Vorlesung FH Koblenz

11
Bayes‘sche Entscheidungstheorie
Loss Funktion und Risk Seien {1,…,c} die c wahren Zustände und {1,…,a} a mögliche Aktionen (Entscheidungen) Loss: Die loss function (kurz: loss) (i|j) gibt die mit der Entscheidung i(x) verbundenen Kosten (cost) an, wenn die wahre Klassenzugehörigkeit durch wj gegeben ist Risk: Der Erwartungswert einer loss-Funktion wird risk R genannt. Da P(j|x) die Wahrscheinlichkeit für das Auftreten der Klasse i ist, definieren wir für c Klassen i: Wenn wir die Daten x messen, können wir die Kosten minimieren, indem wir die Aktion i wählen, welche die riskfunktion minimiert. Geoinformationssysteme - Vorlesung FH Koblenz
 Loss: Die loss function (kurz: loss) (i|j) gibt die mit der Entscheidung i(x) verbundenen Kosten (cost) an, wenn die wahre Klassenzugehörigkeit durch wj gegeben ist. Risk: Der Erwartungswert einer loss-Funktion wird risk R genannt. Da P(j|x) die Wahrscheinlichkeit für das Auftreten der Klasse i ist, definieren wir für c Klassen i: Wenn wir die Daten x messen, können wir die Kosten minimieren, indem wir die Aktion i wählen, welche die riskfunktion minimiert. Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
12
Bayes‘sche Entscheidungstheorie
Bei kontinuierlichen Variablen x wird die loss function zu einer Entscheidungsfunktion (x) für die Werte 1,…,a. Das Gesamtrisiko R ergibt sich zu Wenn (x) so gewählt ist, dass jedes einzelne R(i(x)) minimal für jedes x ist, ist sicherlich R minimal. Die Bayes Entscheidungsregel lautet also: Berechne die bedingten riskfunktionen und wähle die Aktion, bei welcher R(i(x)) minimal ist. Das resultierende Gesamtrisiko R* heißt Bayes risk und die beste erreichbare Lösung Geoinformationssysteme - Vorlesung FH Koblenz
 für die Werte 1,…,a. Das Gesamtrisiko R ergibt sich zu. Wenn (x) so gewählt ist, dass jedes einzelne R(i(x)) minimal für jedes x ist, ist sicherlich R minimal. Die Bayes Entscheidungsregel lautet also: Berechne die bedingten riskfunktionen und wähle die Aktion, bei welcher R(i(x)) minimal ist. Das resultierende Gesamtrisiko R* heißt Bayes risk und die beste erreichbare Lösung. Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
13
Bayes‘sche Entscheidungstheorie
Beispiel: Zwei Kategorien Klassifikation 1 ist die Entscheidung für Klasse 1 2 die Entscheidung für Klasse 2 ij sind die Kosten für die Entscheidung für Klasse i, wenn j vorliegt. Wir schreiben die bedingten Risikofunktionen aus: Üblicherweise würde man sich für 1 entscheiden, wenn R(1|x)< R(2|x). Wenn man dies in den a posteriori Wahrscheinlichkeiten ausdrückt, ergibt sich: Wenn die richtig definiert worden sind, sind 21-11 und 12-22 positiv. In Praxis ist unsere Entscheidung den wahrscheinlicheren Zustand definiert, und wir können nach obiger Ungleichung die Wahrscheinlichkeiten mit den Differenzen der Loss-Funktionen skalieren. Geoinformationssysteme - Vorlesung FH Koblenz
< R(2|x). Wenn man dies in den a posteriori Wahrscheinlichkeiten ausdrückt, ergibt sich: Wenn die richtig definiert worden sind, sind 21-11 und 12-22 positiv. In Praxis ist unsere Entscheidung den wahrscheinlicheren Zustand definiert, und wir können nach obiger Ungleichung die Wahrscheinlichkeiten mit den Differenzen der Loss-Funktionen skalieren. Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
14
Bayes‘sche Entscheidungstheorie
Nach Anwendung der Regel von Bayes können wir die Entscheidungsregel schreiben als: Wir entscheiden uns für 1, falls und für 2 andernfalls. Alternative Schreibweise: Dies ist die Likelihood Ratio und ist eine Entscheidungsregel, welche auf den Likelihood Funktionen der gemessenen Daten x basiert. Wir entscheiden uns für \omega_1, falls die Likelihood ratio eine vorgegebene Schwelle übersteigt. Geoinformationssysteme - Vorlesung FH Koblenz

15
Bayes‘sche Entscheidungstheorie
Loss functions können unterschiedlich definiert werden. Bei der Regression sind es die quadratischen Abstände von der Ausgleichsgeraden. Hier werden die Abweichungen quadratisch gewertet. Wenn bei einer Klassifikation alle Fehlklassifikationen gleich gewichtet werden sollen, wird die so genannte symmetrische oder null-eins loss Funktion angewendet: Geoinformationssysteme - Vorlesung FH Koblenz

16
Bayes‘sche Entscheidungstheorie
Bei der 0-1 loss Funktion werden alle Fehler gleich gewichtet und die risk function ist gleich der mittleren Fehlerwahrscheinlichkeit Geoinformationssysteme - Vorlesung FH Koblenz

17
ML Schätzer für Gauß-Verteilung
Geoinformationssysteme - Vorlesung FH Koblenz

18
ML Schätzer für Gauß-Verteilung
Geoinformationssysteme - Vorlesung FH Koblenz

19
MAP Schätzer für Gauß-Verteilung
Wir wollen P(μ|D) ∝ P(D| μ) P(μ) maximieren. Spezifikation des Priors: P(μ) ~N(μ0,σ02) , μ0 und σ02 sind festgelegt P(μ|D) Geoinformationssysteme - Vorlesung FH Koblenz
 ∝ P(D| μ) P(μ) maximieren. Spezifikation des Priors: P(μ) ~N(μ0,σ02) , μ0 und σ02 sind festgelegt. P(μ|D) Geoinformationssysteme - Vorlesung 7 - FH Koblenz")
20
MAP Schätzer für Gauß-Verteilung
Somit hat p(μ|D) die Gestalt Koeffizientenvergleich ergibt: und , wobei
 die Gestalt. Koeffizientenvergleich ergibt: und. , wobei.")
21
MAP Schätzer für Gauß-Verteilung
Auflösen nach μn, σn ergibt (mit ) : 0 für n∞ 1 für n∞ 0 für n∞ p(μ|D) nimmt bei μn sein Maximum an, somit ist μn der MAP-Schätzer. Für n∞ geht dieser in den ML-Schätzer μ = über. Der Posterior versammelt seine Masse mit n∞ immer enger um μn. Mit zunehmendem n wird der Einfluss des Priors (μ0,σ0) auf den Posterior bzw. den MAP-Schätzer immer geringer.
 : 0 für n∞ 1 für n∞ 0 für n∞ p(μ|D) nimmt bei μn sein Maximum an, somit ist μn der MAP-Schätzer. Für n∞ geht dieser in den ML-Schätzer μ = über. Der Posterior versammelt seine Masse mit n∞ immer enger um μn. Mit zunehmendem n wird der Einfluss des Priors (μ0,σ0) auf den Posterior bzw. den MAP-Schätzer immer geringer.")
22
MAP Schätzer für Gauß-Verteilung
Geoinformationssysteme - Vorlesung FH Koblenz

23
Vielen Dank für Ihre Aufmerksamkeit!
Geoinformationssysteme - Vorlesung FH Koblenz

Ähnliche Präsentationen

![Definition [1]: Sei S eine endliche Menge und sei p eine Abbildung von S in die positiven reellen Zahlen Für einen Teilmenge ES von S sei p definiert.](/1/209241/big_thumb.jpg "Definition [1]: Sei S eine endliche Menge und sei p eine Abbildung von S in die positiven reellen Zahlen Für einen Teilmenge ES von S sei p definiert.>")


>")









>")



 wird auf den 4. Juni (Mittwoch) vorverlegt ! 14 – 16 Zeit:>")
