Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
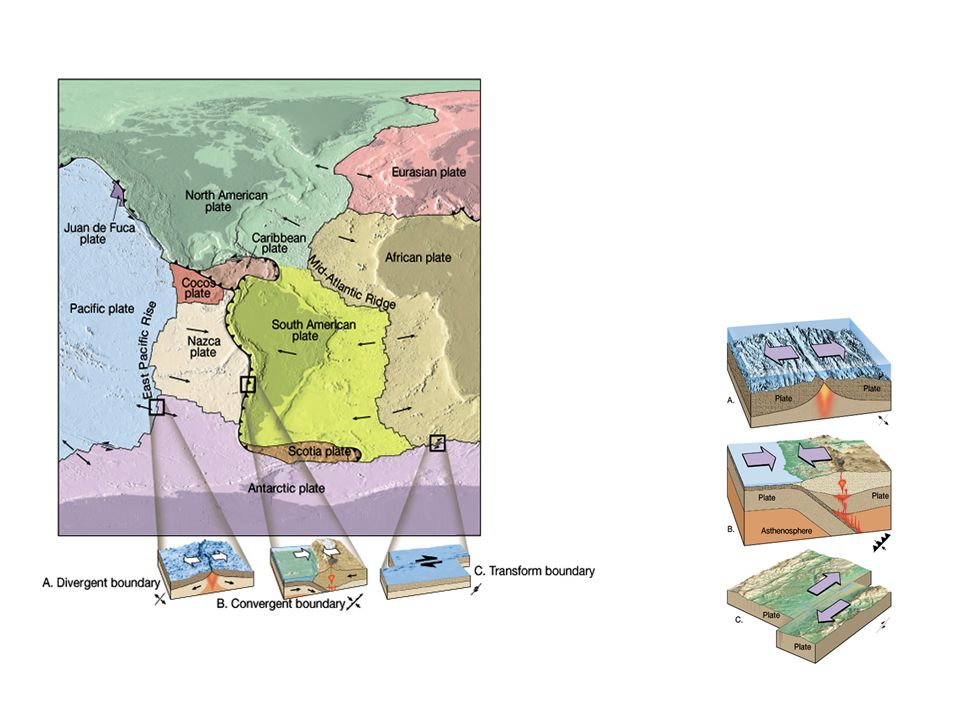
Plate Margins on a flat planet
Transform LL Constructive Convergent Transform RL

4
Plattenränder: a) Konstruktiv (mittelozeanischer Rücken), Spreizungsrate 2cm/yr c) Destruktiv (Subduktionszone), Subduktionsrate 10cm/yr e) Konservativ (Transformstörung), Relativbewegung 6cm/yr b) Relativbewegung A/B = 4cm/yr d) Ibid 10cm/yr f) Ibid 6cm/yr
 Konservativ (Transformstörung), Relativbewegung 6cm/yr. b) Relativbewegung A/B = 4cm/yr. d) Ibid 10cm/yr. f) Ibid 6cm/yr.")
5
6 Arten dextraler (rechtshändiger) Transform-Störungen:
a) Rücken/Rücken (die häufigste Transform Störung in ozeanischen Becken) b)/c) Rücken/Subduktion d)/e)/f) Subduktion/Subduktion ( häufige Transformstörung auf Kontinenten) z.B. San Andreas (Es gibt ebenso 6 sinistrale (linkshändige) Transform Störungen.)
 Rücken/Rücken (die häufigste Transform Störung in ozeanischen Becken) b)/c) Rücken/Subduktion. d)/e)/f) Subduktion/Subduktion ( häufige Transformstörung auf Kontinenten) z.B. San Andreas. (Es gibt ebenso 6 sinistrale (linkshändige) Transform Störungen.)")
6
Rogers, 2008

7
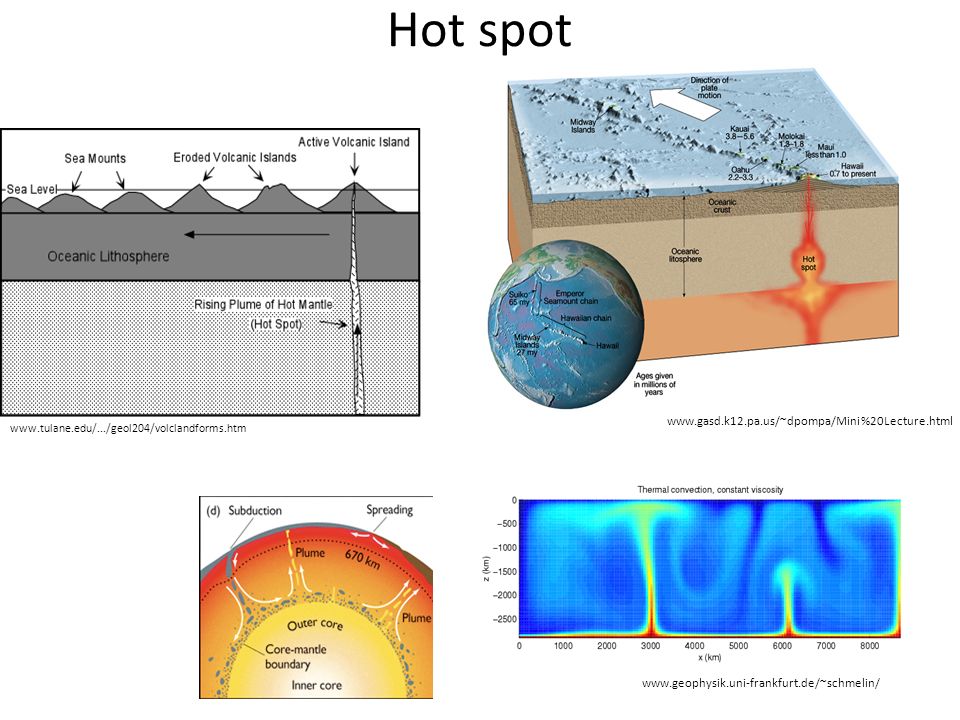
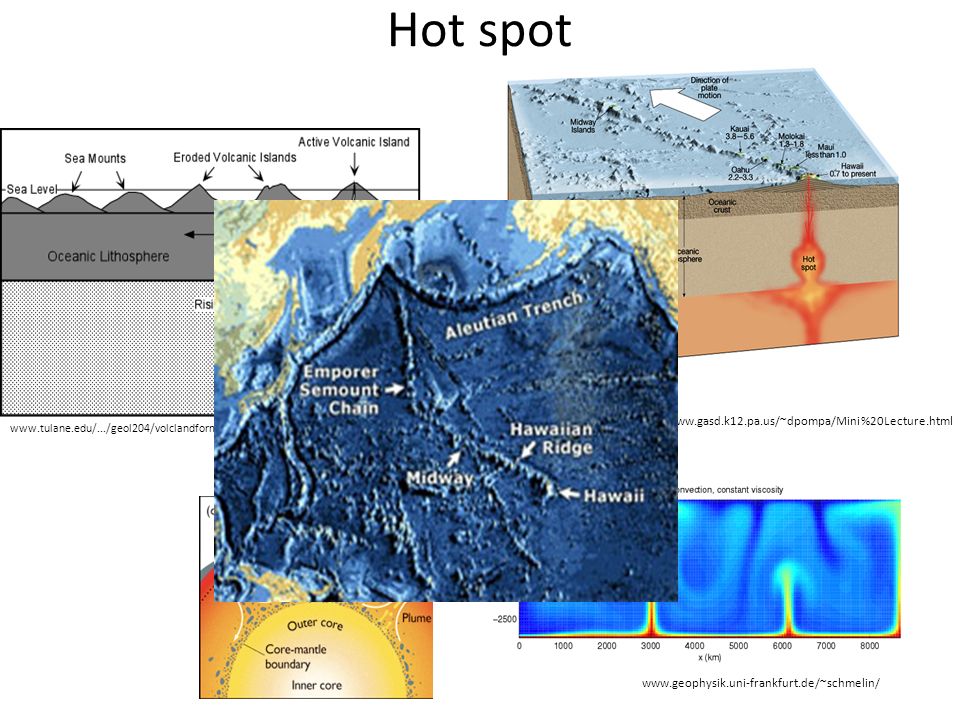
Hot spot www.gasd.k12.pa.us/~dpompa/Mini%20Lecture.html
8
Hot spot www.gasd.k12.pa.us/~dpompa/Mini%20Lecture.html
10
Hotspots Dataset from Smithsonian (not all point are real hotsp

14
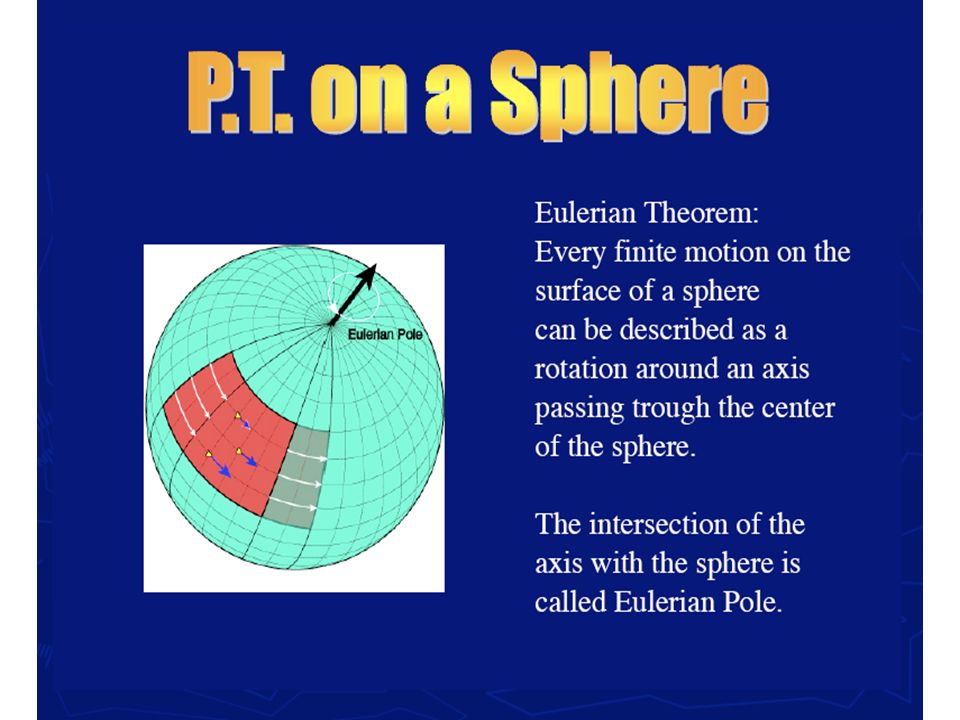
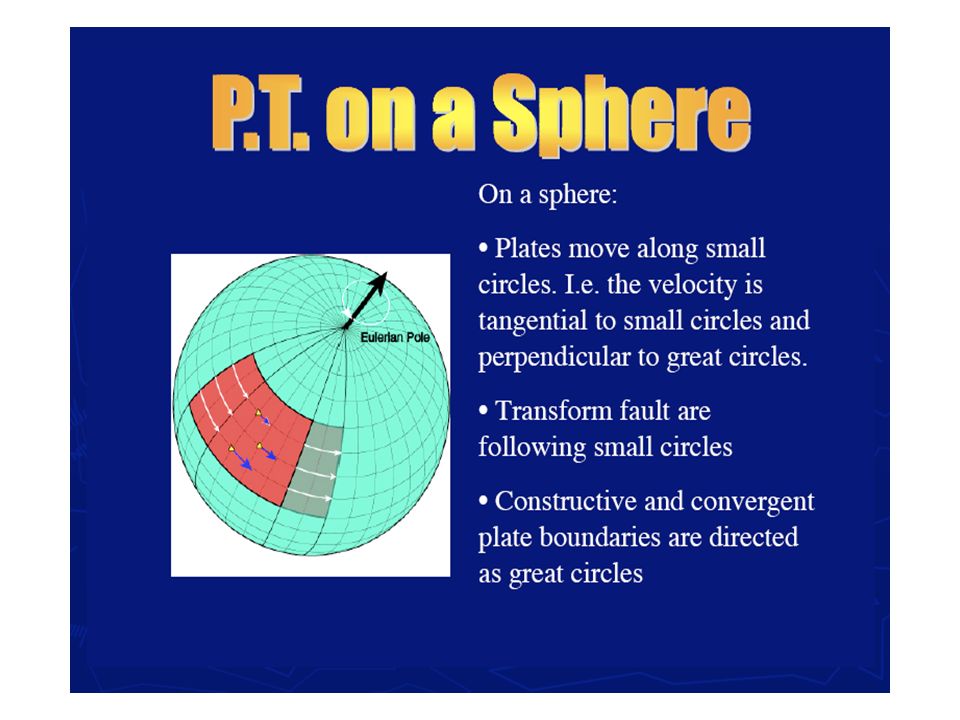
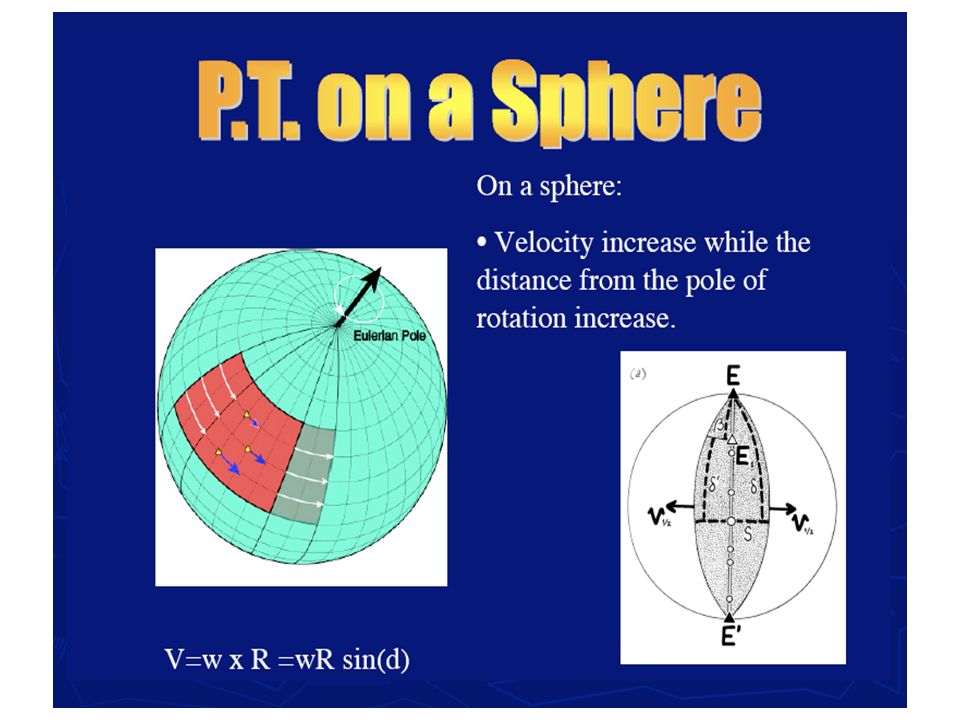
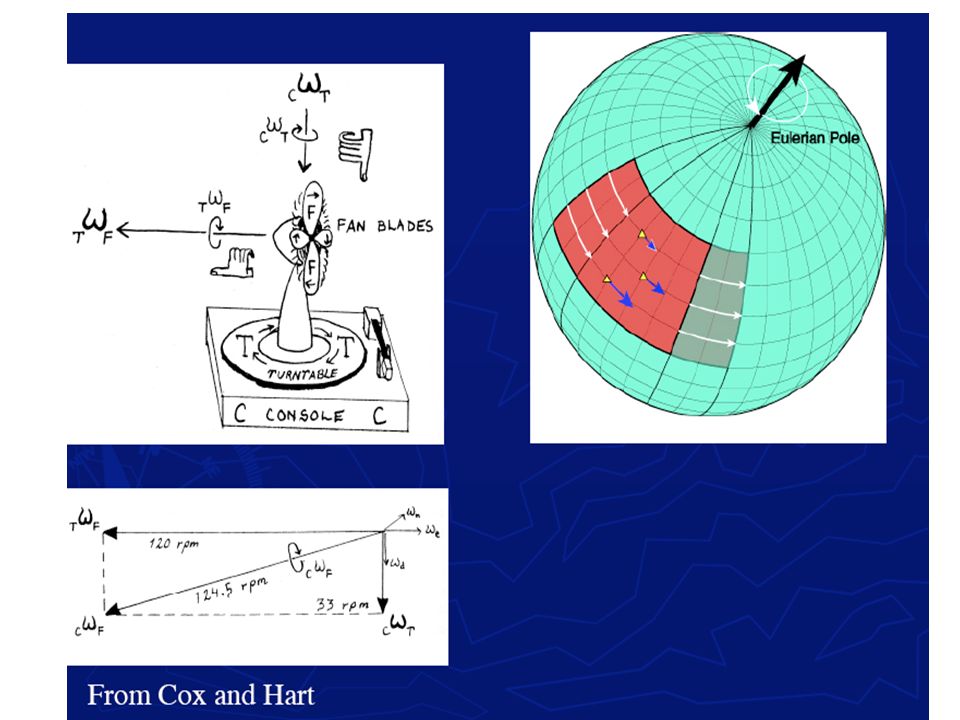
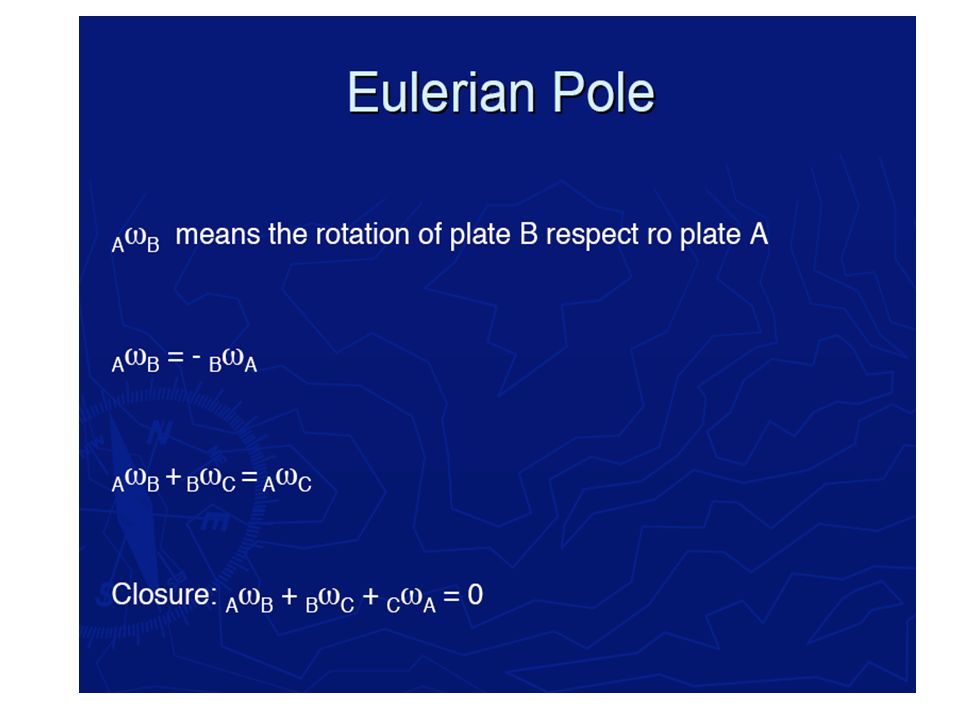
Inverting for the plates Euler pole
Rigid plate rotation: V = Ω x P V·n = Vn V·e = Ve Rogers, 2008

15
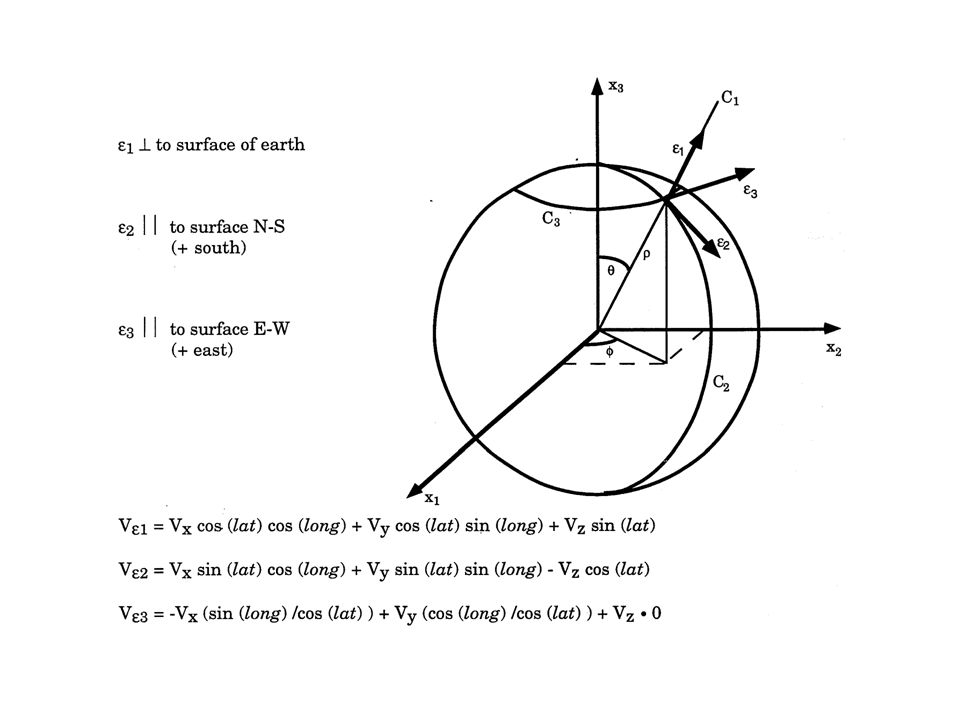
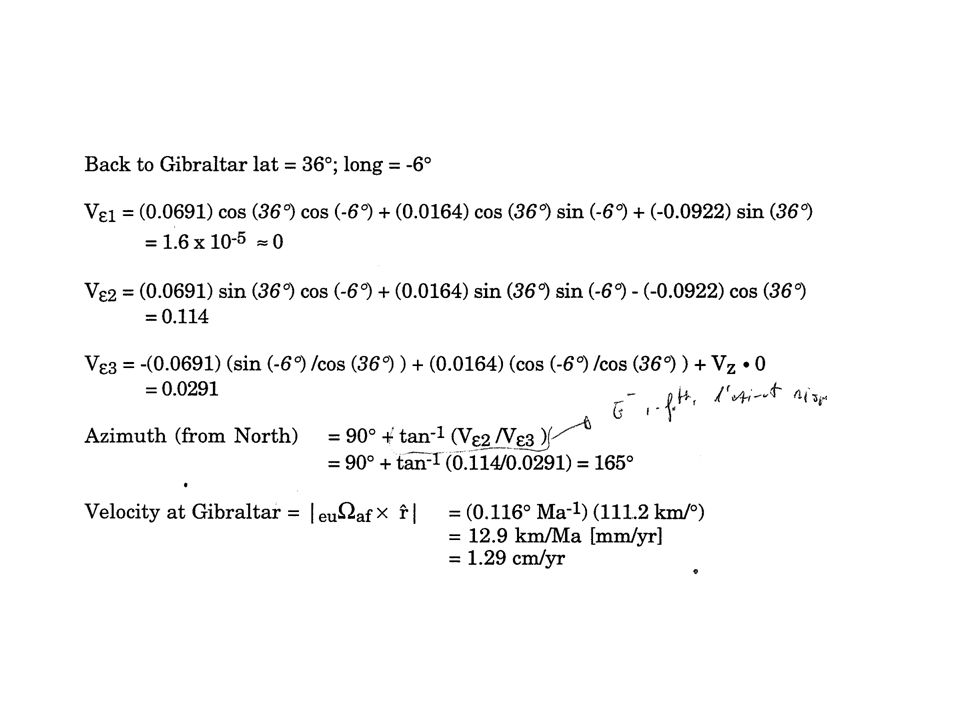
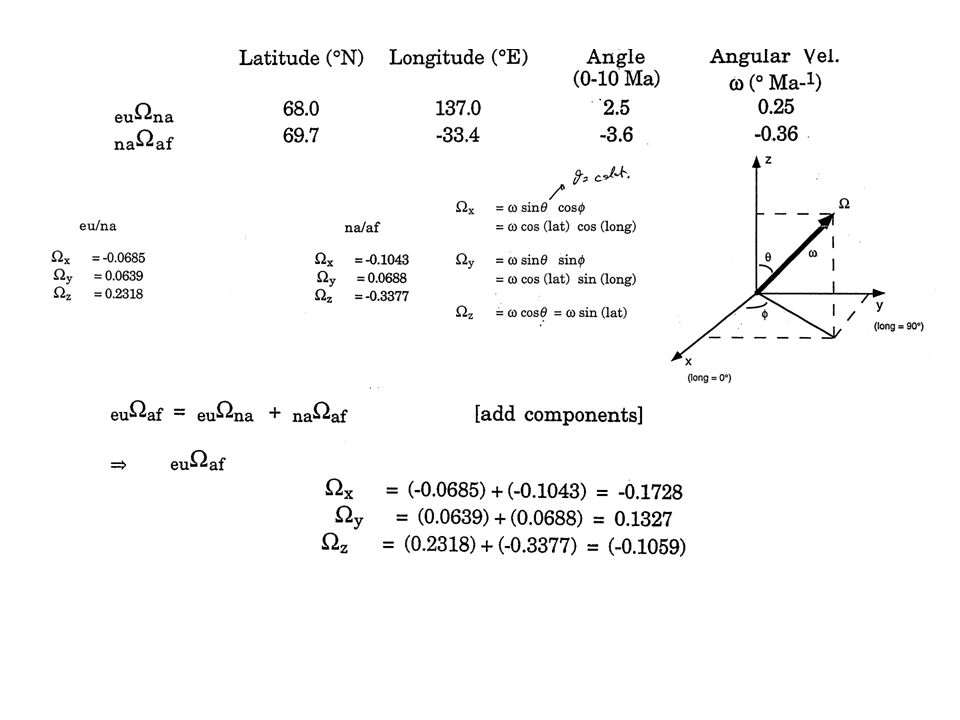
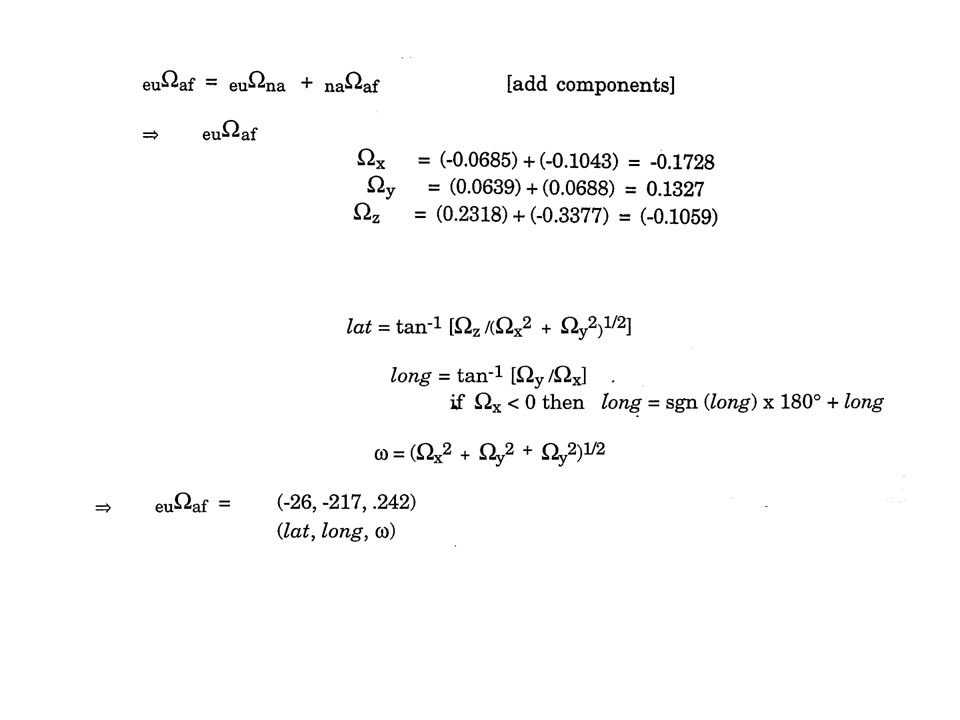
Example AF EU motion at Gibraltar
Eulerian pole : Ω = ( , , ) deg/Myr)
 deg/Myr)")
16
Coordinates Gibraltar 36N 6W (-6E)
")
19
· Inverting for the plates Euler pole Rigid plate rotation: V = Ω x r
V·n = Vn V·e = Ve = Vn = n ·(Ω x r) = (r x n) ·Ω Ve = e ·(Ω x r) = (r x e) ·Ω (r x n)x (r x n)y (r x n)z Ωx Vn (r x e)x (r x e)y (r x e)z Ωy Ve Ωz Invert for Ω that minimizes residual (Vcomputed - Vobserved) Euler vector is that you can describe the motion of a point/rigid plate motion on a sphere by this vector N and e as a local reference frame Call it not equation but system!!! QUCIKER!!!!!!!!!!!!!!! vector represents the rigid plate motion Velocity at a certain point on the plate is only dependent on a Position vecotr and the Euler vector. We can split the velocity into a north and south direction by calculating the scalar product of a northing or easting vector (on the sphere) that is dependent on the Positionvector and the Velocity. The north and east component of the velocity can than also be expressed as The scalarproduct of the northing or easting vecotr and the cross product of the Eulervector and the Positionvector. This is resulting in a Postionmartix that is known for the GPS points that is equal the observed GPS velocity in n and e direction, when the Eulervector is known. As soon as we have 2 GPS points with velocity estimates we have a indetermined system, for which we can estimate Omiga by the minimization of the difference between the computed and observed Velocity.
 = (r x n) ·Ω. Ve = e ·(Ω x r) = (r x e) ·Ω. (r x n)x (r x n)y (r x n)z Ωx Vn. (r x e)x (r x e)y (r x e)z Ωy Ve. Ωz. Invert for Ω that minimizes residual (Vcomputed - Vobserved) Euler vector is that you can describe the motion of a point/rigid plate motion on a sphere by this vector. N and e as a local reference frame. Call it not equation but system!!! QUCIKER!!!!!!!!!!!!!!! vector represents the rigid plate motion. Velocity at a certain point on the plate is only dependent on a Position vecotr and the Euler vector. We can split the velocity into a north and south direction by calculating the scalar product of a northing or easting vector (on the sphere) that is dependent on the Positionvector and the Velocity. The north and east component of the velocity can than also be expressed as The scalarproduct of the northing or easting vecotr and the cross product of the Eulervector and the Positionvector. This is resulting in a Postionmartix that is known for the GPS points that is equal the observed GPS velocity in n and e direction, when the Eulervector is known. As soon as we have 2 GPS points with velocity estimates we have a indetermined system, for which we can estimate Omiga by the minimization of the difference between the computed and observed Velocity.")
20
Problem 3: Do CO and NZ have a subduction?

21
Problem 3: Do CO and NZ have a subduction?
CO NZ pole: 4.8N 124.3W 1.36 deg/Myr 7.5N 82W: 67.8 mm/yr N359E

22
Rogers, 2008

23
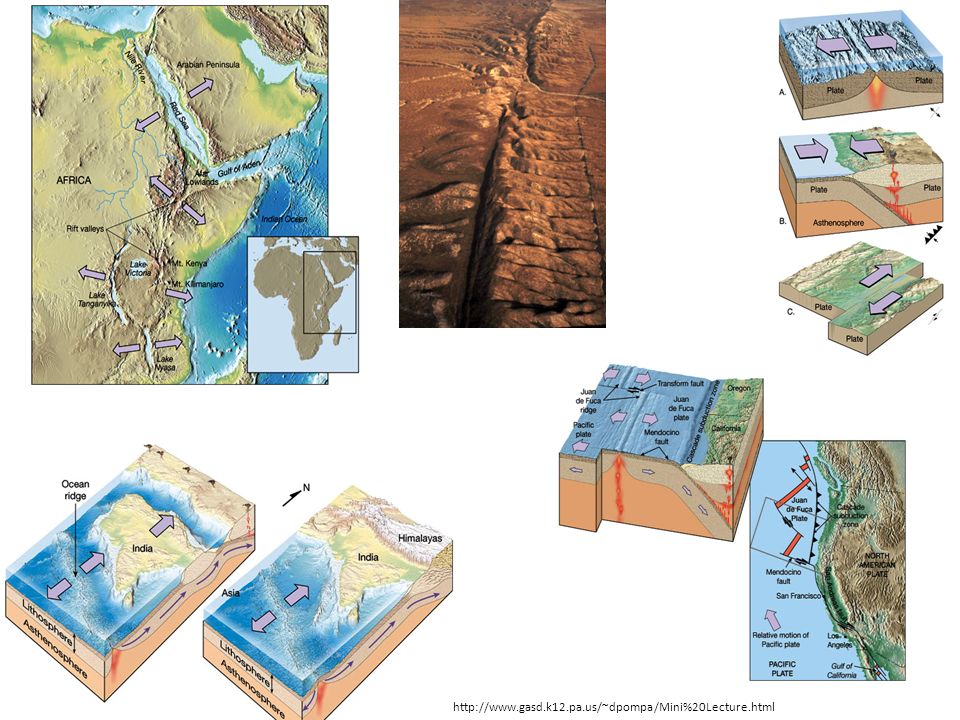
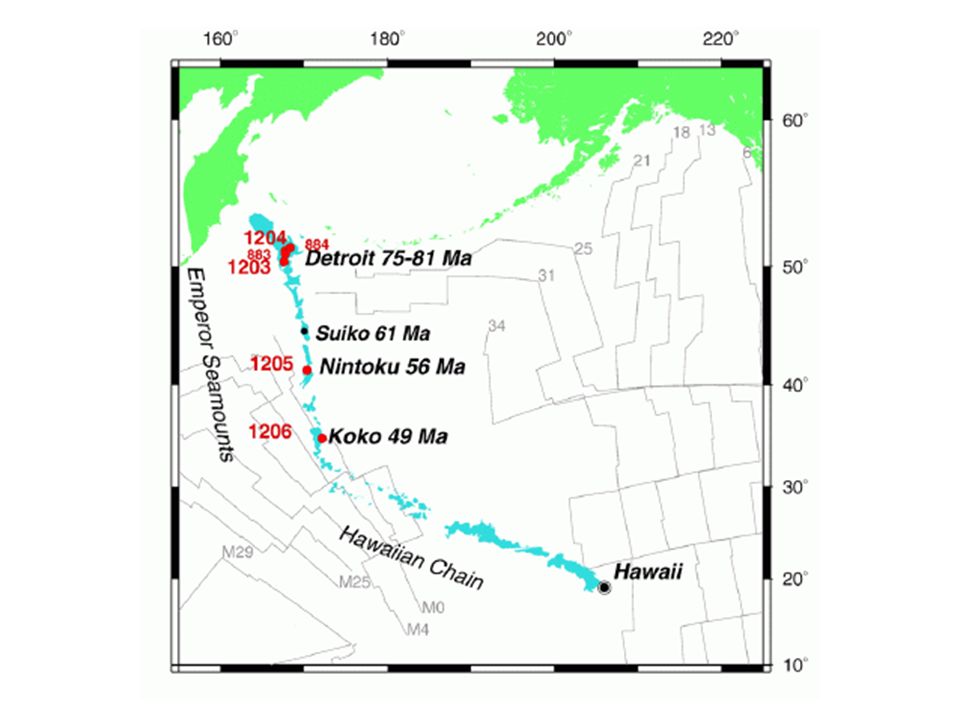
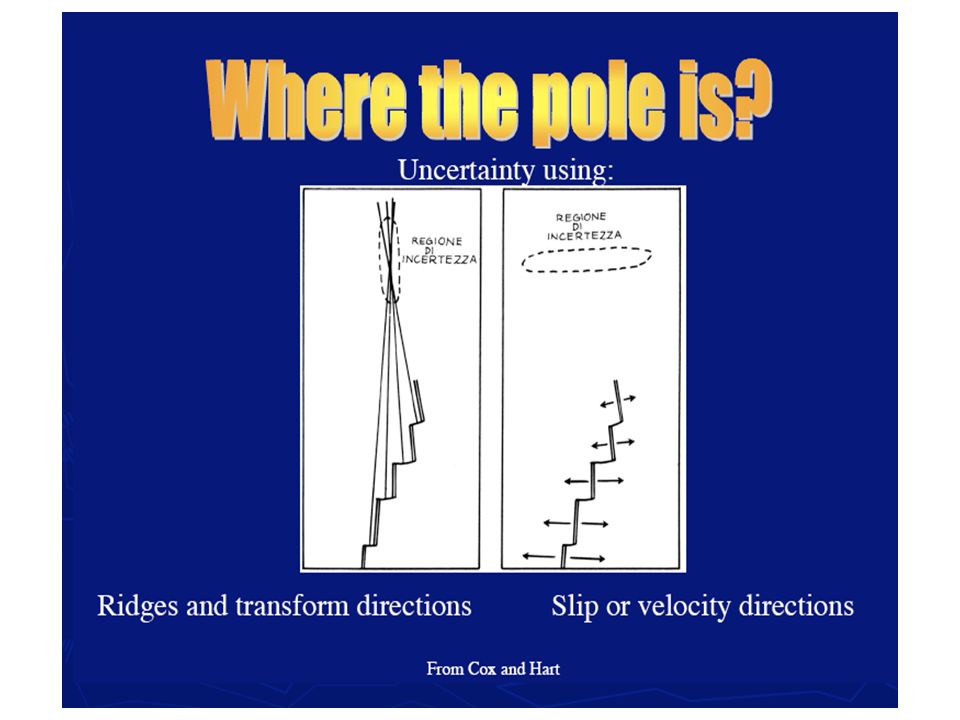
Beispiel: Mittelatlanik
Relativbewegung Afrika, Südamerika wird durch einen Pol nahe des Nordpols beschrieben. Dieser lässt sich aus der Orientierung der Transformstörungen im mittleren Atlantik bestimmen. Die Relativbewegung Amerika/Afrika ist in diesem Segment besonders groß, bedingt durch den fast 90 Grad Abstand zum Rotationspol

26
How fast plates move ???

27
Processed GPS data for Pacific plate in IGSb00 reference frame
Up to now we learned how to calculate the velocity of a station. Here we see the velocity that I calculated for all to us available GPS stations on the Pacific plate. Up to now this velocity is in IGSb00 reference frame. In order to derive a stable PA ref.frame, to which we can relate the motion of BC, we need to compute the Pacific Euler vector that describes the rigid plate motion of PA. Therefore we need to look closer to the location of the GPS station (near plate boundary in deformation zones) and the time-series quality (error ellipse). Choose sites that represent the stable plate.
 and the time-series quality (error ellipse). Choose sites that represent the stable plate.")
28
Stable Pacific plate reference frame
Stable Pacific plate reference frame Residual motion of GPS stations w.r.t. Pacfic plate Euler vector EP for rigid PA. GPA on PA should not have any residual motion. Motion within error rigidity of PA constraint. GPSResidual motion wrt stable PA plate Euler pole (vector) How big is the standard error in terms of the ellpise.
 How big is the standard error in terms of the ellpise.")
30
Transform fault??? Only for constructive margines!

33
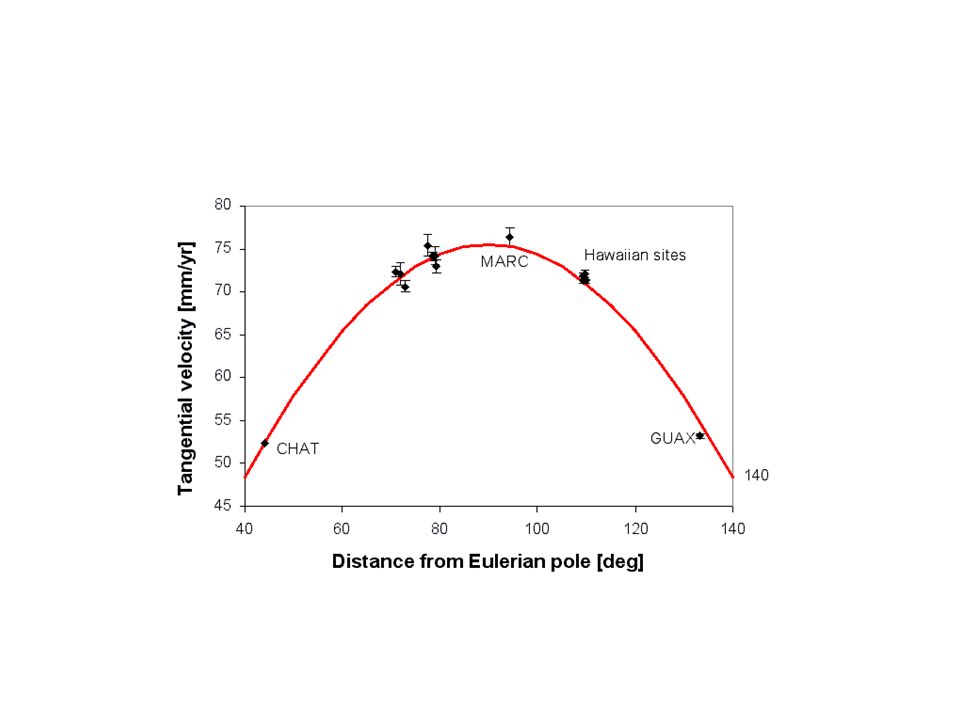
Velocity Of EU wrt AF

36
Where do Eqs occur? Earthquake are release of elastic strain accumulated due to deformation. If plate are rigid must be at plate boundaries! In subduction zone the thermal advection play a big role on location of earthquakes. Marshak, 2005

37
How many plates??? Seismicity from USGS Volcanoes from Smithsonian institute

38
How many plates???

39
Problem 2: Why boundary NA EU is not clear?
NA EU pole: 62N 135E

Ähnliche Präsentationen
![Z-Transformation Die bilaterale Z-Transformation eines Signals x[n] ist die formale Reihe X(z): wobei n alle ganzen Zahlen durchläuft und z, im Allgemeinen,](/1/205073/big_thumb.jpg "Z-Transformation Die bilaterale Z-Transformation eines Signals x[n] ist die formale Reihe X(z): wobei n alle ganzen Zahlen durchläuft und z, im Allgemeinen,>")

 Kein Graffiti in der Schule!>")










>")



 Trackball. Joystick.>")

