Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Verfolgung von farblich markierten Objekten
Sascha Lange

2
Gliederung Bildanalyse Computer Vision Tool Kit
(Extrem) kurze, oberflächliche Einführung in die Bildanalyse Computer Vision Tool Kit Vorstellung meiner Bachelor Arbeit
 kurze, oberflächliche Einführung in die Bildanalyse. Computer Vision Tool Kit. Vorstellung meiner Bachelor Arbeit.")
3
Bildanalyse

4
Definitionen Bildverarbeitung (Image Processing)
“Image processing is a collection of techniques for numerical operation on the pixel data. These include image enhancement for presentation to a human observer and the extraction of features for futher analysis.” (Computer Vision Research – Introduction) Gliederung: Bildbearbeitung und Bildanalyse Bildanalyse (Image Analysis) “Generierung einer bedeutungsvollen Beschreibung eines in einem oder mehreren Bildern zu einem Zeitpunkt oder in einem Zeitraum dargestellten räumlichen Teils der näheren oder ferneren Umgebung mit Hilfe von Computern.” (Verfasser unbekannt) Von der Ikonische Darstellung zu symbolischen Beschreibungen Machine Vision / Computer Vision “The use of devices for non-contact sensing to automatically receive and interpret an image of a real scene in order to obtain information and/or control machines or processes“ (SME) Besonderes Gewicht auf dem Aspekt der Prozessüberwachung und / oder –kontrolle (ev. aber auch nur Überinterpretation)
 Gliederung: Bildbearbeitung und Bildanalyse. Bildanalyse (Image Analysis) Generierung einer bedeutungsvollen Beschreibung eines in einem oder mehreren Bildern zu einem Zeitpunkt oder in einem Zeitraum dargestellten räumlichen Teils der näheren oder ferneren Umgebung mit Hilfe von Computern. (Verfasser unbekannt) Von der Ikonische Darstellung zu symbolischen Beschreibungen. Machine Vision / Computer Vision. The use of devices for non-contact sensing to automatically receive and interpret an image of a real scene in order to obtain information and/or control machines or processes (SME) Besonderes Gewicht auf dem Aspekt der Prozessüberwachung und / oder –kontrolle (ev. aber auch nur Überinterpretation)")
5
Anwendungen Medizin Industrielle Automatisierung Überwachung
Tomographie, Radiologie, Gewebeschnitte Industrielle Automatisierung Qualitätskontrolle, Sortierung, Transport Überwachung Gebäudeüberwachung, Suchen in Menschenmengen Vermessungswesen & Fernerkundung Landvermessung, Satellitenbildauswertung, Radarbilder Human Computer Interfaces Gesture Recognition Biometrie Fingerabdrücke, Authentifizierung Archivierung Content Based Image Retrieval

6
“Arbeiten” in der Computer Vision
Keine klare, allgemeine Standardmethode Derzeit relativ unstrukturierte Sammlung von Verfahren Ingenieurwissenschaftliche Herangehensweise: Auswahl geeigneter Verfahren zur Lösung einer speziellen Problemstellung Aktuelle Schlagworte: Active Vision: Aktive Kontrolle des Sichtfeldes Exemplar-based vision

7
Klassische Bildverarbeitung (Einzelbild)
Bilderfassung Bildverbesserung Modellfreie Segmentierung Modellgestütze Segmentierung Bildsymbolverarbeitung Haus Busch vor Haus Baum vor Haus Symbolische Verarbeitung

8
Zusammenfassung der klassischen Bildverarbeitung
Ausgangspunkt: Ikonische Bildrepräsentierung Ziel: Symbolische Bildbeschreibung Bildverbesserung Häufiges Zwischenziel: Regionenbild Objekterkennung

9
Anwendungen ohne bedeutungsvolle symbolische Beschreibung / Modell
Beispiel Biometrie Direkter Vergleich von “Feature Points” Beispiel Image Based Retrieval Query by example (Farbe, Textur, Anordnung)
")
10
Viele Wege führen nach Rom…
Auf dem Weg zum Regionenbild Kantenbasierte Segmentierung Thresholding Regionenbasierte Segmentierung

11
Faltung (Convolution)
“Zusammenmultiplizieren” von 2 Matrizen verschiedener Dimensionen Die größere Matrix ist hier das Bild Die kleinere wird “Kernel” genannt Verschieben des Kernels über jeden einzelnen Bildpunkt Dabei wird jeder Eintrag im Kernel mit dem darunter liegenden Pixel multipliziert Die Summe der Produkte wird als Resultat dieser Stelle gespeichert Diskreter Fall: Für Bildmatrix FM,N und Kernel KA,B Resultierende Matrix: GM-A+1,N-B+1 Anwendung: Anwendung eines “Filters” auf jedes Pixel Lokale Operatoren (im Gegensatz zu globalen und Punktoperatoren)
")
12
Kantendetektion I Detektion von Kanten anhand von Änderungen in der Helligkeit (1. Ableitung, Helligkeitsgradient) Sobel Kantendetektoren Je ein Kernel für horizontale und vertikale Kanten Absolutbetrag des Gradienten durch Kombination: Je größer der Gradient desto größer das „Ansprechen“ Problem: Anfällig für Rauschen Thresholding Breite, diffuse Linien +1 +2 -1 -2 -1 +1 -2 +2

13
Kantendetektion II: Zero-Crossings der 2. Ableitung
Laplace-Operator Berechnet 2. Ableitung der Grauwerte Isotropher Operator Erhöht Rauschen LoG Operator „Laplace of Gaussian“, Marr-Hildreth Operator Erst Glätten, dann Laplace Operator Bestimmung der „Zero-Crossings“ Dünner Kantenverlauf Feinheit kontrolliert durch Standardabweichung der Gaußglocke Entfernung der Kanten, die nicht durch 1. Ableitung unterstützt werden +1 -4

14
Farbsegmentierung: Constant thresholding
Starker Beleuchtungsgradient Bildfunktion: f(x,y) = (r,g,b) Luminosität: l(r,g,b) = [0..255] Segmentierung: s(l) = [0,1] mit s(l) = 0 für alle l <= t und s(l) = 1 für alle l > t constant threshold t
 = (r,g,b) Luminosität: l(r,g,b) = [0..255] Segmentierung: s(l) = [0,1] mit s(l) = 0 für alle l <= t. und s(l) = 1 für alle l > t. constant threshold. t.")
15
Farbsegmentierung: Adaptive Thresholding
Funktioniert auch bei starkem Gradient in der Beleuchtung Local thresholding: Für jedes Pixel in bestimmter Umgebung statistisch den Threshold bestimmen: median, mean, (max-min)/2 t = median-c Parameter: Umgebungsgröße, c Chow und Kaneko: Bild aufteilen Wahrscheinlichkeit für uniforme Beleuchtung sei höher Threshold für jedes Teilbild bestimmen Für jedes Pixel einen lokalen Schwellwert durch Interpolation finden schneller
/2. t = median-c. Parameter: Umgebungsgröße, c. Chow und Kaneko: Bild aufteilen. Wahrscheinlichkeit für uniforme Beleuchtung sei höher. Threshold für jedes Teilbild bestimmen. Für jedes Pixel einen lokalen Schwellwert durch Interpolation finden. schneller.")
16
Regiongrowing Maximale Homogenitätsbedingung: Region merging
H(Ri) = TRUE, für alle Regionen Ri H(RiURj) = FALSE, für alle i<>j und Ri ist Nachbar von Rj Homogenitätskriterien: Helligkeit Farbe Textur Form Oder Kombination daraus Direkt auf Pixelbild oder vorsegmentiertem Bild Region merging Start mit übersegmentiertem Bild (z.B. Pixelbild) Verschmelzungskriterium z.B. mit Hilfe von H(RiURj) Region splitting Start mit untersegmentiertem Bild (z.B. Bild als ein Segment) Unter Umständen anderes Ergebnis als merging Aus Gründen der Effizienz: Datenstruktur zur Adjazenzrepräsentierung Split and Merge Baut gleichzeitig einen Quadtree auf
 = TRUE, für alle Regionen Ri. H(RiURj) = FALSE, für alle i<>j und Ri ist Nachbar von Rj. Homogenitätskriterien: Helligkeit. Farbe. Textur. Form. Oder Kombination daraus. Direkt auf Pixelbild oder vorsegmentiertem Bild. Region merging. Start mit übersegmentiertem Bild (z.B. Pixelbild) Verschmelzungskriterium z.B. mit Hilfe von H(RiURj) Region splitting. Start mit untersegmentiertem Bild (z.B. Bild als ein Segment) Unter Umständen anderes Ergebnis als merging. Aus Gründen der Effizienz: Datenstruktur zur Adjazenzrepräsentierung. Split and Merge. Baut gleichzeitig einen Quadtree auf.")
17
Zwischenschritt: Regionenrepräsentierung und -beschreibung
Ikonische Darstellung der Regionen Übergang zur symbolischen Verarbeitung Verminderung des Speicher- und Rechenaufwandes Formrepräsentierungen: Konturbasiert (Kettenkodes, Fourierdeskriptoren, B-Splines) Regionenbasiert (Skelettierung, Dekomposition -> Graph) Regionenbeschreibungen: Reichen für die Analyse ev. auch aus Möglichst topologisch Invariante Beschreibungen Kontur basiert: Curvature Kantenlänge (Umfang) Biegungsenergie Regionenbasiert Fläche, Zentrum, Höhe, Breite Exzentrizität: Verhältnis zwischen Haupt- und Nebenachse „Elongatedness“: größter Durchmesser / Fläche „Rechteckigkeit“ Kompaktheit: (Umfang / Fläche)
 Regionenbasiert (Skelettierung, Dekomposition -> Graph) Regionenbeschreibungen: Reichen für die Analyse ev. auch aus. Möglichst topologisch Invariante Beschreibungen. Kontur basiert: Curvature. Kantenlänge (Umfang) Biegungsenergie. Regionenbasiert. Fläche, Zentrum, Höhe, Breite. Exzentrizität: Verhältnis zwischen Haupt- und Nebenachse. „Elongatedness : größter Durchmesser / Fläche. „Rechteckigkeit Kompaktheit: (Umfang / Fläche)")
18
Objekterkennung Ziel: Objekt Klassifizierung „Welt“wissen nötig
Über verarbeitete Objekte Über Objektklassen Verschiedene Techniken: Statistic Pattern Recognition Neural Nets Syntactic pattern recognition Graphmatching Optimierungstechniken

19
Vom Einzelbild zur Bildfolge
Feature Point, bzw. Objektverfolgung Active Vision

20
Feature Point Tracking
Ziel: „Trajektorien“ Vorgehen: Pfadkohärenzfunktion, die eine Zuordnung bewertet Finden des globalen Optimums Probleme: Constraints für die Pfadkohärenzfunktion Widersprüchliche Constraints Physikalisches Modell des beobachteten Systems nötig Minimierung des Abstands reicht nicht aus: t-1 t
![]()
21
Pfad Koherenz Funktion (nach Sethi und Jain)
Bewertet Richtungsänderungen und Geschwindigkeitsänderungen Dazu 2 Richtungsvektoren von t-2 über t-1 bis t 1. Term berechnet den Kosinus (0 wenn senkrecht zueinander) 2. Term bestraft Längenunterschiede Probleme: Gewichtung zwischen Geschwindigkeit und Richtung Zusammen- oder Abprallen und andere Verletzungen des zugrunde liegenden Modells
 2. Term bestraft Längenunterschiede. Probleme: Gewichtung zwischen Geschwindigkeit und Richtung. Zusammen- oder Abprallen und andere Verletzungen des zugrunde liegenden Modells.")
22
Active Vision Aktive Kontrolle der Kamera und des Systems
Um mehr Daten zu erlangen Intelligente Datenakquisition Kontrolliert durch die partiell interpretierte und bemessene Szene Genau die Daten erlangen, die benötigt werden Kontinuierliche, „Real-Time“ Operation „Vision as Process“

23
Exemplar Based Image Recognition
Keine Verarbeitung bis zur symbolischen Beschreibung des Bildes Kein Szenenmodell Stattdessen Bilddatenbank Verschiedene Ansichten der Objekte „Prototypen“ der Objektklassen Ganze Szenen Steuerungssignal ev. direkt mit Szenen gekoppelt (z.B. IBR) Ähnlichkeitsoperationen, die direkt auf den Bildern arbeiten ? EROSAL
 Ähnlichkeitsoperationen, die direkt auf den Bildern arbeiten. EROSAL.")
24
Computer Vision Tool Kit

25
Motivation Vorlesung „Intelligente Robotersteuerung“ WS2000/2001
„global vision system“ für die Small Size League andere Messungen in künstlichen Umgebungen Stab balancieren Pendelschwingung

26
Aufgabenstellung Bibliothek, die folgendes unterstützt:
„tracking“ von farblich markierten Objekten in künstlichen Umgebungen Ausgabe von: Objekttyp, Position, Orientierung, Geschwindigkeit Echtzeitverarbeitung eines Videostroms Kalibrierung

27
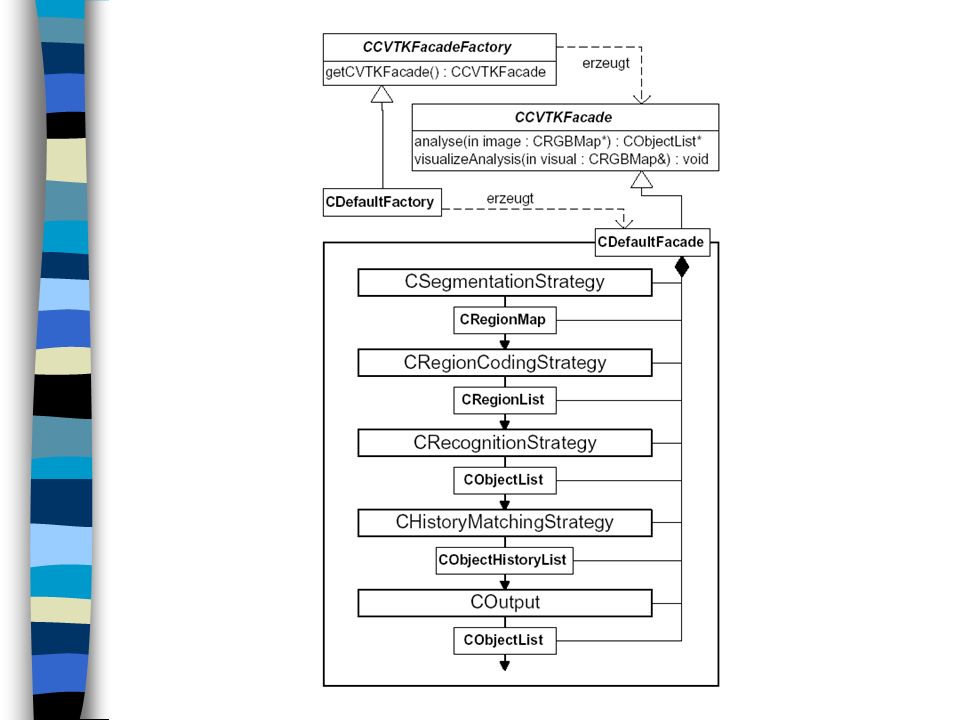
Schichten - Architektur
Jede Schicht kapselt einen Algorithmus Datenstrukturen zwischen den Schichten sind definiert vom Bild zu höheren Repräsentationen Bottom-Up Analyse cvtk.h RGB-Matrix Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Low - Level Vision Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen High - Level Vision Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
")
29
Farbsegmentierung Bildquelle: f(x,y) = (r,g,b)
RGB-Matrix Bildquelle: f(x,y) = (r,g,b) Verwendung einer Lookup - Tabelle: Funktion l:(r,g,b) c in einer Tabelle gespeichert Berechnung von s(x,y)=l°f(x,y) durch einfache Nachschlageoperation (im Voraus berechnet) lookuptable.h colorsegmentation.cpp Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
 = (r,g,b) Verwendung einer Lookup - Tabelle: Funktion l:(r,g,b) c in einer Tabelle gespeichert. Berechnung von s(x,y)=l°f(x,y) durch einfache Nachschlageoperation (im Voraus berechnet) lookuptable.h colorsegmentation.cpp. Farbsegmentierung. Lookup Tabelle. Farbklassen-Matrix. Connected Regions. Kettencode-Listen. Template Matching. Objekt-Templates. Objektklassen-Listen. Object Tracking. Objektinstanz-Liste. object(Position, [Orientierung], Richtung, Geschwindigkeit)")
30
Kettenkodierung Kodieren: Reduktion der Datenmenge
Beschreibung der Kontur nach Freeman 4er, 8er Nachbarschaft Sequenz von Nummern, die Richtung der Kontur kodieren Reduktion der Datenmenge schnell zu berechnen einfache Berechnung von: Zentrum Fläche umgebendes Rechteck chaincoding.h chaincoding.cpp RGB-Matrix Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
")
31
Kettenkodierung(2) Fläche Zentrum der Fläche Allgemein:
A = b(x,y) dx dy Diskrete Integration nach einer Achse Differenz zwischen Integral der oberen und unteren Kante ist die Fläche Zentrum der Fläche Allgemein: X = x b(x,y) dx dy / b(x,y) dx dy Analog zur Fläche Beim Integrieren mit x multiplizieren
 dx dy. Diskrete Integration nach einer Achse. Differenz zwischen Integral der oberen und unteren Kante ist die Fläche. Zentrum der Fläche. Allgemein: X = x b(x,y) dx dy / b(x,y) dx dy. Analog zur Fläche. Beim Integrieren mit x multiplizieren.")
32
Objekterkennung Objekt - Schablonen: Naiver Suchalgorithmus
RGB-Matrix Objekt - Schablonen: object id center (col, area), axis (col, area, dist), mark (col, area, dist, orien) end Naiver Suchalgorithmus Toleranzgrenzen „Harte“ Matches (keine Wks) Ausgabe: Liste von Objekt-Eimern mit „Instanzen“ Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
, axis (col, area, dist), mark (col, area, dist, orien) end. Naiver Suchalgorithmus. Toleranzgrenzen. „Harte Matches (keine Wks) Ausgabe: Liste von Objekt-Eimern mit „Instanzen Farbsegmentierung. Lookup Tabelle. Farbklassen-Matrix. Connected Regions. Kettencode-Listen. Template Matching. Objekt-Templates. Objektklassen-Listen. Object Tracking. Objektinstanz-Liste. object(Position, [Orientierung], Richtung, Geschwindigkeit)")
33
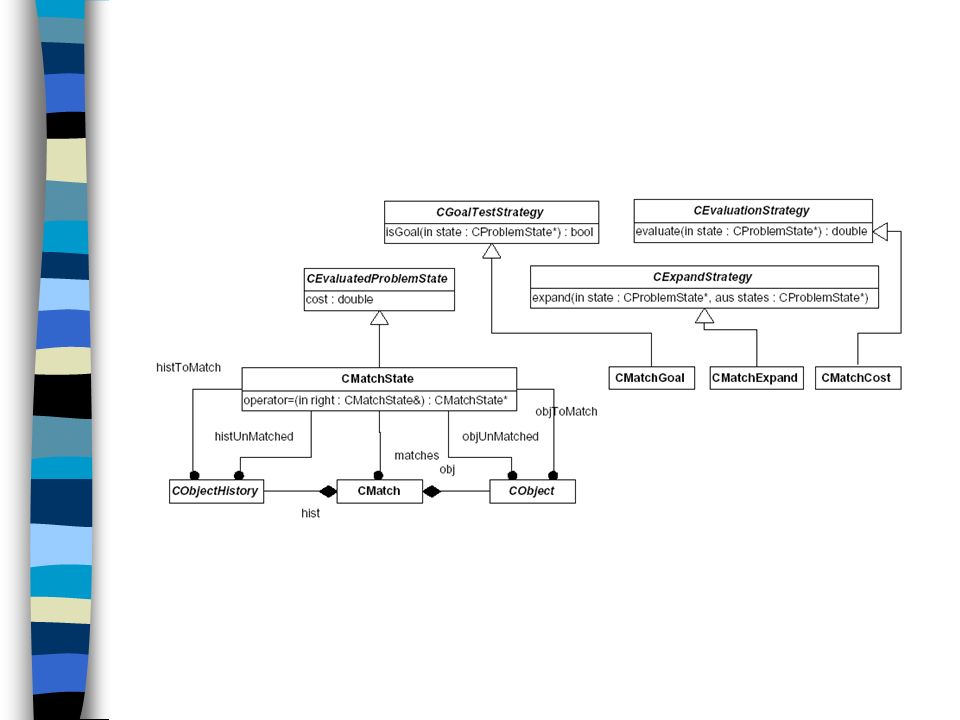
Objektverfolgung Ziel: Einfacher Fall: Schwieriger Fall:
Zuordnung der gefundenen Instanzen zur richtigen „Instanzgeschichte“ Einfacher Fall: Objekte eindeutig identifiziert Schwieriger Fall: Mehrere Instanzen pro Schablone Innerhalb jedes Eimers „tracking“ - Algorithmus RGB-Matrix Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
")
34
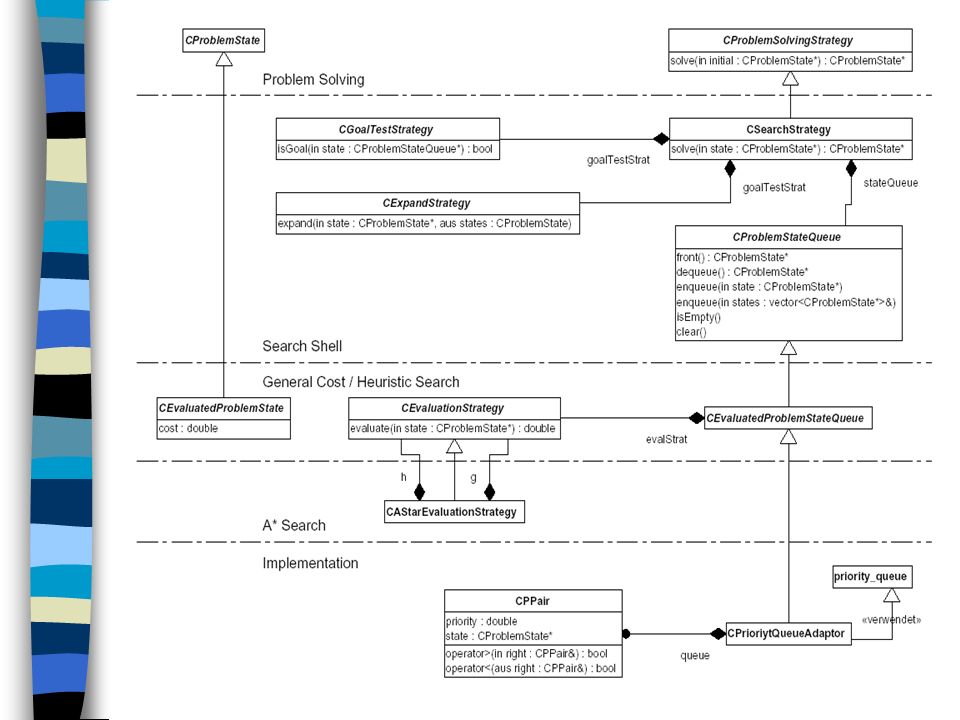
Trackingalgorithmus Optimierung eines globalen, konfigurierbaren Kriteriums Uniform Cost Search (oder A*, wenn Heuristic für Kriterium vorhanden) Kosten h(node) = Kriterium Knoten sind mögliche Paarungen In jeder Ebene wird ein Objekt mehr zugeordnet h(k1) = 0 h(k2) = c xt,1 – xt-1,i1 h(k3) = d ≥ c xt,1 – xt-1,i1 xt,2 – xt-1,i2 xt,1 – xt-1,i1 xt,2 – xt-1,i3 xt,1 – xt-1,i1 xt,2 – xt-1,i4 xt,1 – xt-1,i1 xt,2 – xt-1,i2 xt,3 – xt-1,i3 xt,1 – xt-1,i1 xt,2 – xt-1,i2 xt,2 – <unmatched>
![]()
37
Berechnung der Ausgabe
Berechnung der benötigten Werte anhand der Instanzgeschichte Orientierung: Winkel der Strecke center / axis zur x-Achse Richtung / Geschwindigkeit aus der Geschichte Z.Zt. Ungeglättet „Einfache“ Glättung? Kalmann-Filter zum Ausgleich der Meßfehler? Subpixelgenauigkeit RGB-Matrix Farbsegmentierung Lookup Tabelle Farbklassen-Matrix Connected Regions Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
")
38
Erweiterungen Vorverarbeitung wie Glättung, Helligkeit
RGB-Matrix Koordinatentransformation Farbsegmentierung Lookup Tabelle Morphologische Operatoren wie Opening / Closing Farbklassen-Matrix Connected Regions Region merging Kettencode-Listen Template Matching Objekt-Templates Objektklassen-Listen Object Tracking Objektinstanz-Liste object(Position, [Orientierung], Richtung, Geschwindigkeit)
")
39
Ausblick Einsatz der Bibliothek in der Midsize-League
3D, Messung von Entfernungen Karlsruhe / Dortmund Bereitstellung verbesserter Kalibrierungswerkzeuge

Ähnliche Präsentationen






>")








 Prof. Th. Ottmann.>")

 T. Lauer.>")

