Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Maschinendynamik Hinweise & Videos zu den MATALB – Beispielen Wie löst man die Aufgaben der Arbeitsblätter mit MATLAB? Institut für Technische und Numerische Mechanik Universität Stuttgart Prof. Dr.-Ing. Prof. E.h. Peter Eberhard

2
Übersicht Kinematik Animation Bewegungsgleichungen des Doppelpendels
Zeit-Integration der Bewegungsgl. des Doppelpendels & Animation Bewegungsgl. und Reaktionsgl. des Einzylindermotors Zeit-Int. der Bewegungsgl. des Einzylindermotors & Animation Modal-Transformation Institut für Technische und Numerische Mechanik Universität Stuttgart Prof. Dr.-Ing. Prof. E.h. Peter Eberhard

3
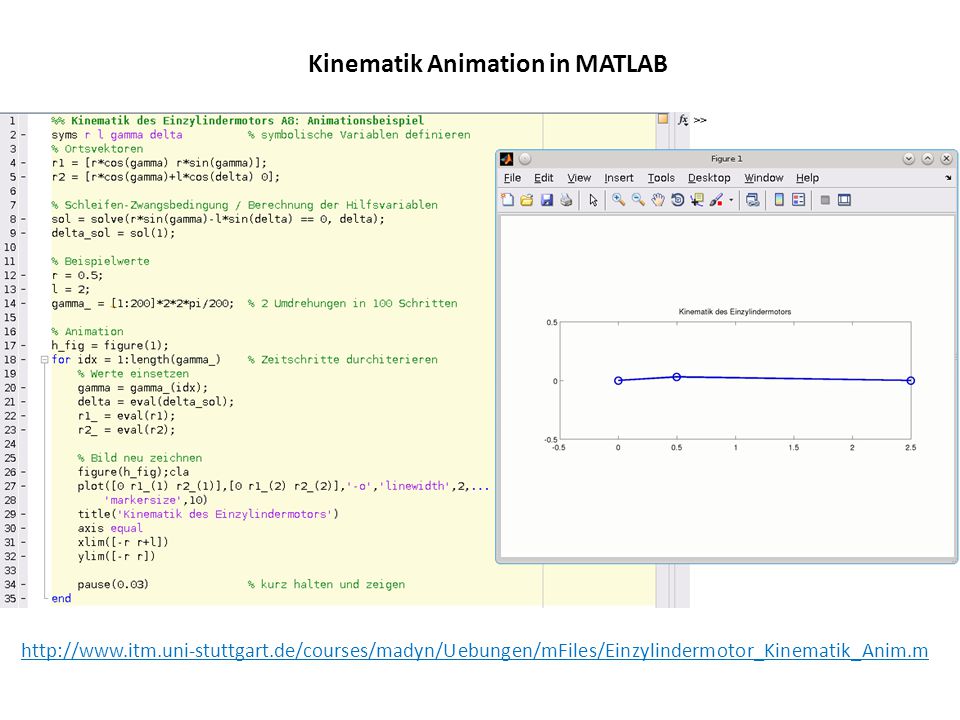
Kinematik Animation in MATLAB
4
Bewegungsgleichungen des Doppelpendels

5
Bewegungsgleichungen des Doppelpendels, A14, Herleitung in MATLAB
Run ….

6
Bewegungsgleichungen des Doppelpendels in der Zustandsform
… dt 𝐭 , 𝐱 𝐲 𝐲 𝐱 = 𝐲 𝐌 −1 ⋅ 𝐪−𝐤 𝐟(𝐱,𝐮,t) 𝐱= 𝐲 𝐲 ODE Trafo: Integration der ODE in MATLAB: % Integration der Zustandgleichung: [t, x] = ode45('beweggl_funktion',tspan,x0);
 𝐱= 𝐲 𝐲. ODE. Trafo: Integration der ODE in MATLAB: % Integration der Zustandgleichung: [t, x] = ode45( beweggl_funktion ,tspan,x0);")
7
Zeit-Integration der Beweg.gl. des Doppelpendels & Animation in MATLAB

8
Bewegungsgleichungen und Reaktionsgleichungen des Einzylindermotors

9
Bewegungs- und Reaktionsgleichungen des Einzylindermotors, Herleitung in MATLAB

10
Bewegungs- und Reaktionsgleichungen des Einzylindermotors
Integration der Bewegungsgleichungen: … dt 𝐭 , 𝐱 𝐲 𝐲 𝐱 = 𝐲 𝐌 −1 ⋅ 𝐪−𝐤 𝐟(𝐱,𝐮,t) 𝐱= 𝐲 𝐲 ODE Trafo: 𝐲, 𝐲 ,t Berechnung der Reaktionskräfte aus den Reaktionsgleichungen: 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐪 c 𝐤 = 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐪 e 𝐪 − 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐐 𝐍 ⋅𝐠 ⇒𝐠= 𝐍(𝐲,t) −𝟏 ⋅ 𝐤 (𝐲, 𝐲 ,t)− 𝐪 (𝐲, 𝐲 ,t)
 𝐱= 𝐲 𝐲. ODE. Trafo: 𝐲, 𝐲 ,t. Berechnung der Reaktionskräfte aus den Reaktionsgleichungen: 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐪 c 𝐤 = 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐪 e 𝐪 − 𝐐 T ⋅ 𝐌 −1 ⋅ 𝐐 𝐍 ⋅𝐠. ⇒𝐠= 𝐍(𝐲,t) −𝟏 ⋅ 𝐤 (𝐲, 𝐲 ,t)− 𝐪 (𝐲, 𝐲 ,t)")
11
Zeit-Integration der Beweg. gl
Zeit-Integration der Beweg.gl. des Einzylindermotors & Animation in MATLAB pulsierende Gaskraft gaskraft_funktion

12
Zeit-Integration der Beweg. gl
Zeit-Integration der Beweg.gl. des Einzylindermotors & Animation in MATLAB

13
ungedämpfte mech. Betrachtung
Modal-Transformation (vereinfacht): ungedämpfte mech. Betrachtung 𝐑𝐞 𝛌 =𝟎 da System ungedämpft 𝐌⋅ 𝐲 +𝐊⋅𝐲=𝟎 ∈ ℝ f×f ⇒q λ =det (𝐌 λ 2 μ +𝐊) =0 ⇒EW: λ=j ω 0 & EV: 𝐲 i 𝐲 i ≔ 𝐲 i T ⋅𝐌⋅ 𝐲 i 𝐲 i → 𝐘 ≔ 𝐲 1 … 𝐲 i … 𝐘 𝐓 ⋅𝐌⋅ 𝐘 ⋅ 𝐲 + 𝐘 𝐓 ⋅𝐊⋅ 𝐘 ⋅ 𝐲 =𝟎 𝐄 diag ω 0 2 MATLAB-mFile
: ungedämpfte mech. Betrachtung. 𝐑𝐞 𝛌 =𝟎. da System ungedämpft. 𝐌⋅ 𝐲 +𝐊⋅𝐲=𝟎 ∈ ℝ f×f. ⇒q λ =det (𝐌 λ 2 μ +𝐊) =0. ⇒EW: λ=j ω 0 & EV: 𝐲 i. 𝐲 i ≔ 1 𝐲 i T ⋅𝐌⋅ 𝐲 i 𝐲 i → 𝐘 ≔ 𝐲 1 … 𝐲 i … 𝐘 𝐓 ⋅𝐌⋅ 𝐘 ⋅ 𝐲 + 𝐘 𝐓 ⋅𝐊⋅ 𝐘 ⋅ 𝐲 =𝟎. 𝐄. diag ω 0 2. MATLAB-mFile.")
14
ZRD Mech. Betrachtung
Modal-Transformation (vereinfacht): ZRD Mech. Betrachtung 𝐲 𝐲 𝐱 = 𝟎 𝐄 −𝐌 −𝟏 ⋅𝐊 − 𝐌 −𝟏 ⋅𝐃 ⋅𝐱 𝐀 𝐌⋅ 𝐲 +𝐃⋅ 𝐲 +𝐊⋅𝐲=𝟎 ∈ ℝ f×f ⇒p λ =det 𝐄 λ−𝐀 =0 ⇒q λ =det 𝐌 λ 2 +𝐃 λ+𝐊 =0 ⇒EW: λ i & EV: 𝐱 i & ⇒ 𝐗≔ 𝐱 1 … 𝐱 i … ⇒EW: λ i & EV: 𝐲 i 𝐲 i ≔ 𝐲 i T ⋅𝐌⋅ 𝐲 i 𝐲 i → 𝐘 ≔ 𝐲 1 … 𝐲 i … λ=σ+j ω 𝐱 = 𝐗 −𝟏 ⋅𝐀⋅𝐗 ⋅ 𝐱 , 𝐘 𝐓 ⋅𝐌⋅ 𝐘 𝐌 ⋅ 𝐲 𝐘 𝐓 ⋅𝐃⋅ 𝐘 𝐃 ⋅ 𝐲 𝐘 𝐓 ⋅𝐊⋅ 𝐘 𝐊 ⋅ 𝐲 =𝟎 𝚲=diag λ i Spezialfall: Proportional-Dämpfung (Rayleigh) 𝐃=α𝐌+β𝐊 ⇒ 𝐌 =𝐄 ⇒ 𝐊 =diag ω 0 2 ⇒ 𝐃 =diag 2 D ω 0 MATLAB-mFile
: ZRD Mech. Betrachtung. 𝐲 𝐲 𝐱 = 𝟎 𝐄 −𝐌 −𝟏 ⋅𝐊 − 𝐌 −𝟏 ⋅𝐃 ⋅𝐱 𝐀. 𝐌⋅ 𝐲 +𝐃⋅ 𝐲 +𝐊⋅𝐲=𝟎 ∈ ℝ f×f. ⇒p λ =det 𝐄 λ−𝐀 =0. ⇒q λ =det 𝐌 λ 2 +𝐃 λ+𝐊 =0. ⇒EW: λ i & EV: 𝐱 i & ⇒ 𝐗≔ 𝐱 1 … 𝐱 i … ⇒EW: λ i & EV: 𝐲 i. 𝐲 i ≔ 1 𝐲 i T ⋅𝐌⋅ 𝐲 i 𝐲 i → 𝐘 ≔ 𝐲 1 … 𝐲 i … λ=σ+j ω. 𝐱 = 𝐗 −𝟏 ⋅𝐀⋅𝐗 ⋅ 𝐱 , 𝐘 𝐓 ⋅𝐌⋅ 𝐘 𝐌 ⋅ 𝐲 + 𝐘 𝐓 ⋅𝐃⋅ 𝐘 𝐃 ⋅ 𝐲 + 𝐘 𝐓 ⋅𝐊⋅ 𝐘 𝐊 ⋅ 𝐲 =𝟎. 𝚲=diag λ i. Spezialfall: Proportional-Dämpfung (Rayleigh) 𝐃=α𝐌+β𝐊. ⇒ 𝐌 =𝐄. ⇒ 𝐊 =diag ω 0 2. ⇒ 𝐃 =diag 2 D ω 0. MATLAB-mFile.")
Ähnliche Präsentationen



















