Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Team : 13th Legion Igor Pshul Julie Mogoun Max Schmitt Steffen Balzer

2
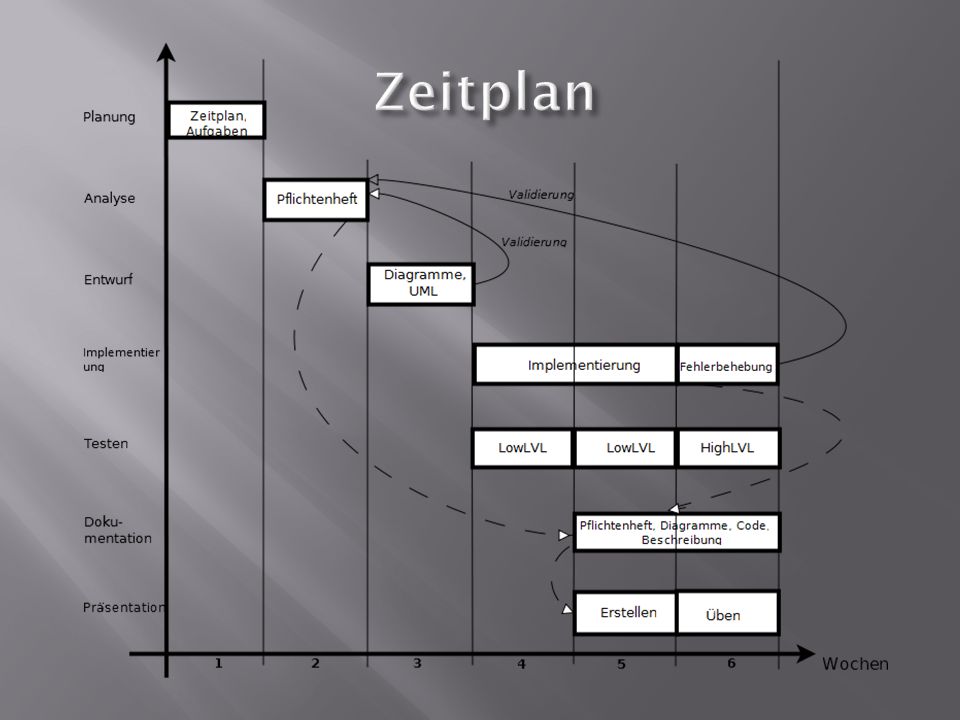
Zeitplan, ToolsFlussdiagrammMethodenFazit

4
Vorlagen, die mit Inhalt gefüllt werden können

5
„Ordner“ auf den von mehreren PC‘s zugegriffen werden kann Datensicherung in einem zentralen Projektarchiv ( repository ) Revisionszählung mit Möglichkeit der Wiederherstellung
 Revisionszählung mit Möglichkeit der Wiederherstellung")
9
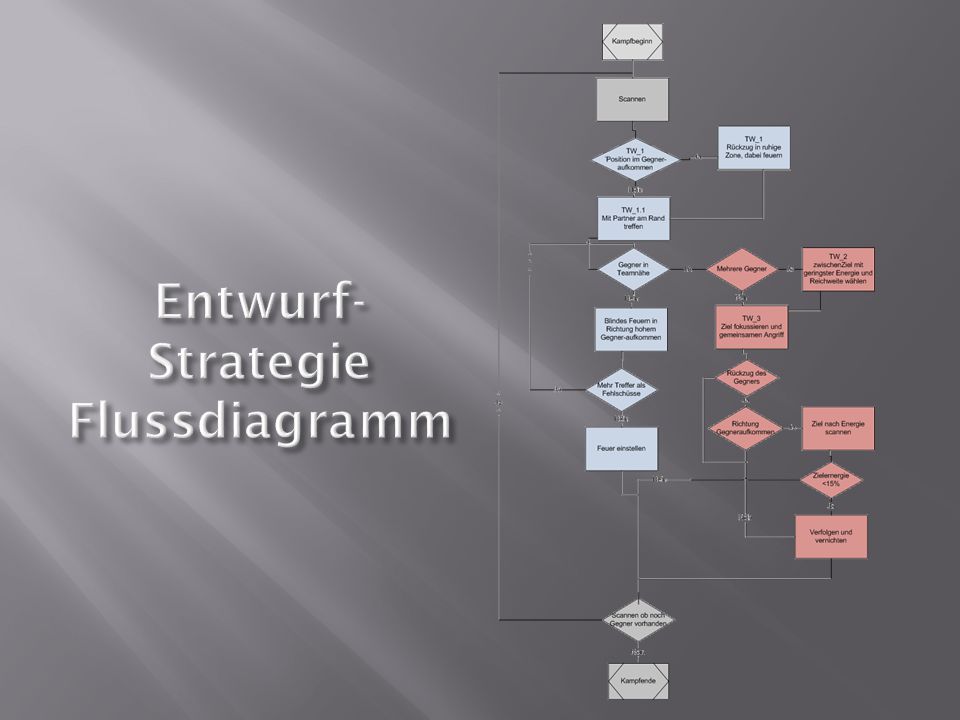
Rückzug in ruhige Zone, dabei feuern Scannen Mit Teamkamerad am Rand treffen Position im Gegnerauf- kommen Gegner in Teamnähe Ja Nein Ja Nein Offensivtaktik Defensivhaltung

10
Mehrere Gegner Zielenergie < 15% Richtung Gegner- aufkommen Rückzug des Gegners Ziel fokussieren und gemeinsamer Angriff Verfolgen und vernichten Ziel nach Energie scannen Zwischen Ziel mit geringster Energie und Reichweite wählen Ja Nein Ja Nein Scannen Kampf- beginn Ja

11
Blindes Feuern in Richtung Gegneraufkommen Gegner in Teamnähe Mehr Treffer als Fehlschüsse Nein Feuer einstellen Ja Nein Scannen

12
if (heading > angle ) { if (heading- angle >=0 && heading-angle <90) { robot.turnLeft(heading-angle ); robot.ahead(c); } if (heading- angle =270){ robot.turnRight(360 - heading+angle ); robot.ahead(c); } if (heading- angle =180) { robot.turnLeft( (heading-angle) - 180); robot.back(c); } if (heading- angle =90){ robot.turnRight(180 - (heading-angle)); robot.back(c); } angle heading
 { if (heading- angle >=0 && heading-angle <90) { robot.turnLeft(heading-angle ); robot.ahead(c); } if (heading- angle =270){ robot.turnRight(360 - heading+angle ); robot.ahead(c); } if (heading- angle =180) { robot.turnLeft( (heading-angle) - 180); robot.back(c); } if (heading- angle =90){ robot.turnRight(180 - (heading-angle)); robot.back(c); } angle heading")
13
private ArrayList filter = new ArrayList(); (…) synchronized void filter(ScannedRobotEvent e){ int i=0; boolean none = true; while (i< filter.size()){ if(filter.get(i).getName().equals(e.getName())) none = false; i++; } if(none && !isTeammate(e.getName())) filter.add(e); }
; (…) synchronized void filter(ScannedRobotEvent e){ int i=0; boolean none = true; while (i< filter.size()){ if(filter.get(i).getName().equals(e.getName())) none = false; i++; } if(none && !isTeammate(e.getName())) filter.add(e); }")
14
public double[] populationCheck (ArrayList filter){ int anz1=0, anz2=0, anz3=0,anz4=0; double[] ziel = new double[4]; for (int i = 0; i < filter.size(); i++){ if (getTargetsX(robot, filter.get(i)) > robot.getBattleFieldWidth()/2 && getTargetsY(robot, filter.get(i)) > robot.getBattleFieldHeight() /2) anz1++;
![public double[] populationCheck (ArrayList filter){ int anz1=0, anz2=0, anz3=0,anz4=0; double[] ziel = new double[4]; for (int i = 0; i < filter.size(); i++){ if (getTargetsX(robot, filter.get(i)) > robot.getBattleFieldWidth()/2 && getTargetsY(robot, filter.get(i)) > robot.getBattleFieldHeight() /2) anz1++;](http://images.slideplayer.org/7/1859895/slides/slide_14.jpg "public double[] populationCheck (ArrayList filter){ int anz1=0, anz2=0, anz3=0,anz4=0; double[] ziel = new double[4]; for (int i = 0; i < filter.size(); i++){ if (getTargetsX(robot, filter.get(i)) > robot.getBattleFieldWidth()/2 && getTargetsY(robot, filter.get(i)) > robot.getBattleFieldHeight() /2) anz1++;")
15
else if (…) double x_1_1 = robot.getBattleFieldWidth() - (robot.getBattleFieldWidth()/4), y_1_1 = robot.getBattleFieldHeight(), x_1_2 = robot.getBattleFieldWidth(), y_1_2 = robot.getBattleFieldHeight() - (robot.getBattleFieldHeight()/4), (…) if(anz1 <= anz2 && anz1 <= anz3 && anz1 <= anz4) {ziel[0]=x_1_1; ziel[1] = y_1_1; ziel[2] = x_1_2; ziel[3] = y_1_2;} else if (…) return ziel;
![else if (…) double x_1_1 = robot.getBattleFieldWidth() - (robot.getBattleFieldWidth()/4), y_1_1 = robot.getBattleFieldHeight(), x_1_2 = robot.getBattleFieldWidth(), y_1_2 = robot.getBattleFieldHeight() - (robot.getBattleFieldHeight()/4), (…) if(anz1 <= anz2 && anz1 <= anz3 && anz1 <= anz4) {ziel[0]=x_1_1; ziel[1] = y_1_1; ziel[2] = x_1_2; ziel[3] = y_1_2;} else if (…) return ziel;](http://images.slideplayer.org/7/1859895/slides/slide_15.jpg "else if (…) double x_1_1 = robot.getBattleFieldWidth() - (robot.getBattleFieldWidth()/4), y_1_1 = robot.getBattleFieldHeight(), x_1_2 = robot.getBattleFieldWidth(), y_1_2 = robot.getBattleFieldHeight() - (robot.getBattleFieldHeight()/4), (…) if(anz1 <= anz2 && anz1 <= anz3 && anz1 <= anz4) {ziel[0]=x_1_1; ziel[1] = y_1_1; ziel[2] = x_1_2; ziel[3] = y_1_2;} else if (…) return ziel;")
16
(...) try{ broadcastMessage(e.getName()); } catch(Exception ex){ out.println("Fehler beim Senden der Nachricht von"+getName()); } double[] befehl = new double[2]; (...) try{ broadcastMessage(befehl); out.print("sende Nachricht"); } catch(Exception ex){ out.println("Fehler beim Senden der Nachricht von"+getName()); } (...)
![(...) try{ broadcastMessage(e.getName()); } catch(Exception ex){ out.println( Fehler beim Senden der Nachricht von +getName()); } double[] befehl = new double[2]; (...) try{ broadcastMessage(befehl); out.print( sende Nachricht ); } catch(Exception ex){ out.println( Fehler beim Senden der Nachricht von +getName()); } (...)](http://images.slideplayer.org/7/1859895/slides/slide_16.jpg "(...) try{ broadcastMessage(e.getName()); } catch(Exception ex){ out.println( Fehler beim Senden der Nachricht von +getName()); } double[] befehl = new double[2]; (...) try{ broadcastMessage(befehl); out.print( sende Nachricht ); } catch(Exception ex){ out.println( Fehler beim Senden der Nachricht von +getName()); } (...)")
17
public void onMessageReceived(MessageEvent e){ Object empfang = e.getMessage(); if(empfang instanceof double[]){ ziel = (double[]) empfang; out.print("empfangen"); start2 = true; m.moveTo(ziel[0], ziel[1]); start2 = false; } else if(empfang instanceof String){ befehl = (String) empfang; out.println(befehl); }
![public void onMessageReceived(MessageEvent e){ Object empfang = e.getMessage(); if(empfang instanceof double[]){ ziel = (double[]) empfang; out.print( empfangen ); start2 = true; m.moveTo(ziel[0], ziel[1]); start2 = false; } else if(empfang instanceof String){ befehl = (String) empfang; out.println(befehl); }](http://images.slideplayer.org/7/1859895/slides/slide_17.jpg "public void onMessageReceived(MessageEvent e){ Object empfang = e.getMessage(); if(empfang instanceof double[]){ ziel = (double[]) empfang; out.print( empfangen ); start2 = true; m.moveTo(ziel[0], ziel[1]); start2 = false; } else if(empfang instanceof String){ befehl = (String) empfang; out.println(befehl); }")
19
ErfahrungenProbleme Verbesserungs- vorschläge Erweiterbar- und Wiederverwert- barkeit

Ähnliche Präsentationen







 Axel (Dieb) Andreas(Polizist) David(Polizist)>")





 Ja! Jeden Tag. B) Meistens aber nicht jeden Tag. C) Ab und zu. D) Nein, nie!>")








