Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Teconsult Precision Robotics

2
Genauigkeitssteigerung von Industrierobotern Anwendung auf SCARA-Roboter

3
Roboterkalibriersystem ROSY Anwendungsgebiete: l Hochgenaue Applikationen l Off-line- Programmierung l Verbesserung der Austauschbarkeit

4
Roboterkalibriersystem ROSY Möglichkeiten: l Vermessung und l Kalibrierung von: l Werkzeug l Werkstück l Roboter

5
Roboterkalibriersystem ROSY Grundproblem: l Abweichungen durch kinematische Fehler des realen Roboters gegenüber dem idealen Modell

6
Roboterkalibriersystem ROSY Gründe: l Fertigungstoleranzen l Montagefehler l Dejustage l Beschädigung l Verschleiß l Thermische Einflüsse

7
Roboterkalibriersystem ROSY Erfordernis: l Steigerung der Absolutgenauigkeit bis nahe an die Wiederholgenauigkeit IstSoll

8
Roboterkalibriersystem ROSY Weg: l Kalibrierung der Kinematik l Korrektur der Maschinendaten

9
Roboterkalibriersystem ROSY Sensorik: l Digitale Kameras l LED-Beleuchtung l Vermessener TCP l Universaladapter

10
Roboterkalibriersystem ROSY Eigenschaften: l Schnell l Portabel l Hochgenau l Bedienfreundlich l Herstellerunabhängig

11
Roboterkalibriersystem ROSY Robotertypen: l Denso l KUKA l Fanuc l SEF l Mitsubishi l Comau l ABB l Stäubli l Motoman l Panasonic l Adept

12
Roboterkalibriersystem ROSY Beispielresultat: l Fehler vorher: Ø 1,44 mm l Fehler nachher: Ø 0,12 mm

13
Roboterkalibriersystem ROSY Weitere Optionen: l TCP- Vermessung l Base- Vermessung

14
Roboterkalibriersystem ROSY Ziele: l Reduzierung von Stillstandszeiten l Bessere Übertragbarkeit von off-line-Programmen l Prozeßsicherheit l Qualitätskontrolle l Neue Einsatzfelder

15
Roboterkalibriersystem ROSY

16
Neuentwicklung: SCARA-Kalibrierung l Schwenkarmroboter l XYZ-Position, Rotation um die Senkrechte l sehr schnell

17
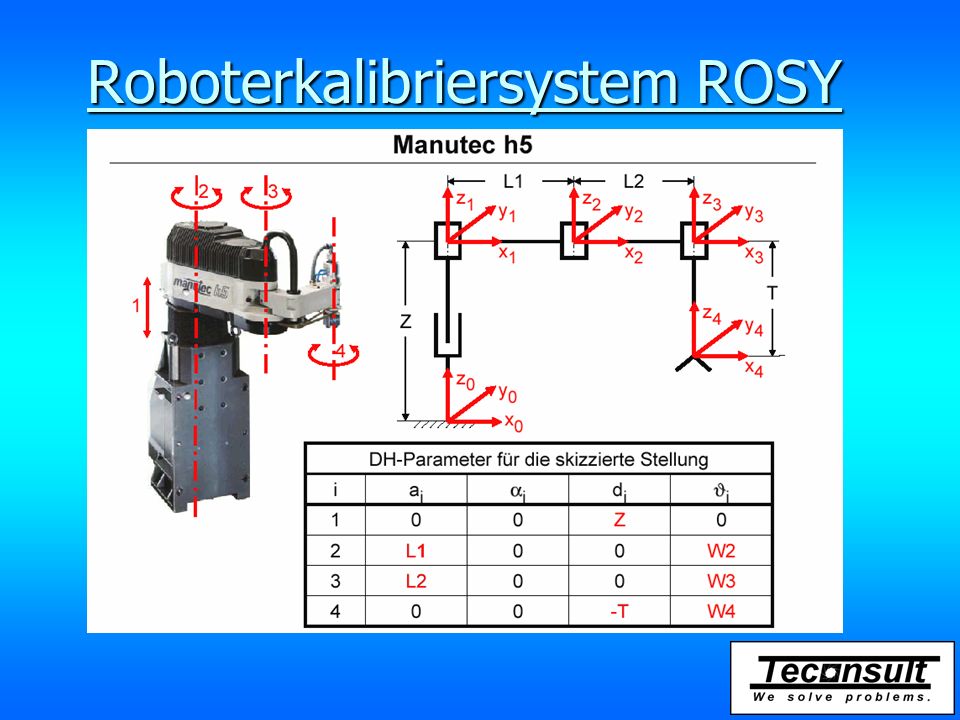
SCARA-Kinematik: l 3 Rotationsachsen, 1 Linearachse l gute Wiederholgenauigkeit l Absolutgenauigkeit? Roboterkalibriersystem ROSY

20
Ablauf: l Abweichungen messen (40 Pos.) l Parameterfehler berechnen (6 Par.) l Steuerungsmodell korrigieren l Testen
 l Parameterfehler berechnen (6 Par.) l Steuerungsmodell korrigieren l Testen")
21
Roboterkalibriersystem ROSY Anwendung: Handymontage l kleine Teile l 4D-Positionierung l Depalettierung Austauschbarkeit

22
Roboterkalibriersystem ROSY Anwendung: Roboterhersteller l Absolutgenauigkeit l Reproduzierbarkeit l Austauschbarkeit Qualitätskontrolle

23
Roboterkalibriersystem ROSY Anwendung: Werkzeugindustrie l Kameraunterstützung l identische Zellen l hängende Roboter Absolutgenauigkeit

24
Roboterkalibriersystem ROSY Ergebnis: l Fehler vorher: max. 1,3 mm l Fehler nachher: max. 0,2 mm 85% Verbesserung

25
Roboterkalibriersystem ROSY Mittlere Genauigkeit in der Ebene

26
Roboterkalibriersystem ROSY Ergebnisse: l Hochgenauer IR l Kein Nachteachen l Austauschbarkeit

27
Roboterkalibriersystem ROSY Return on Investment: l Beispiel: Montagezelle l Stillstand: 20 Tage p.a. l Mit ROSY: 4 Tage p.a. l Ersparnis: 100.000 € p.a. l Amortisation: 3 Monate

28
- Danke für Ihre Aufmerksamkeit - Roboterkalibriersystem ROSY www.Teconsult.de

Ähnliche Präsentationen









 Carsten Büttner, MSc.>")










