Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine- Schnittstellen Chakib Bensajjay Erstgutachter: Prof. Dr. Dr. h.c. mult. Wolfgang Wahlster Zweitgutachter: Dr.-Ing. Christian Müller Betreuer: Dipl.-Inform. Michael Feld

2
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren.")
3
1 Einführung 3 Wiss. Fragestellung 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 2 Adaptive Systeme
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 2 Adaptive Systeme.")
4
1 Einführung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 3 Wiss. Fragestellung

5
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren.")
6
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 5 Kopfhaltungsanalyse
 7 Evaluation Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 5 Kopfhaltungsanalyse.")
7
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 6 Bildakquisition (Framework )
.")
8
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 7 Evaluation
 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 7 Evaluation.")
9
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 4 Kamera basierte Verfahren 8 Zusammenfassung
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 4 Kamera basierte Verfahren 8 Zusammenfassung.")
10
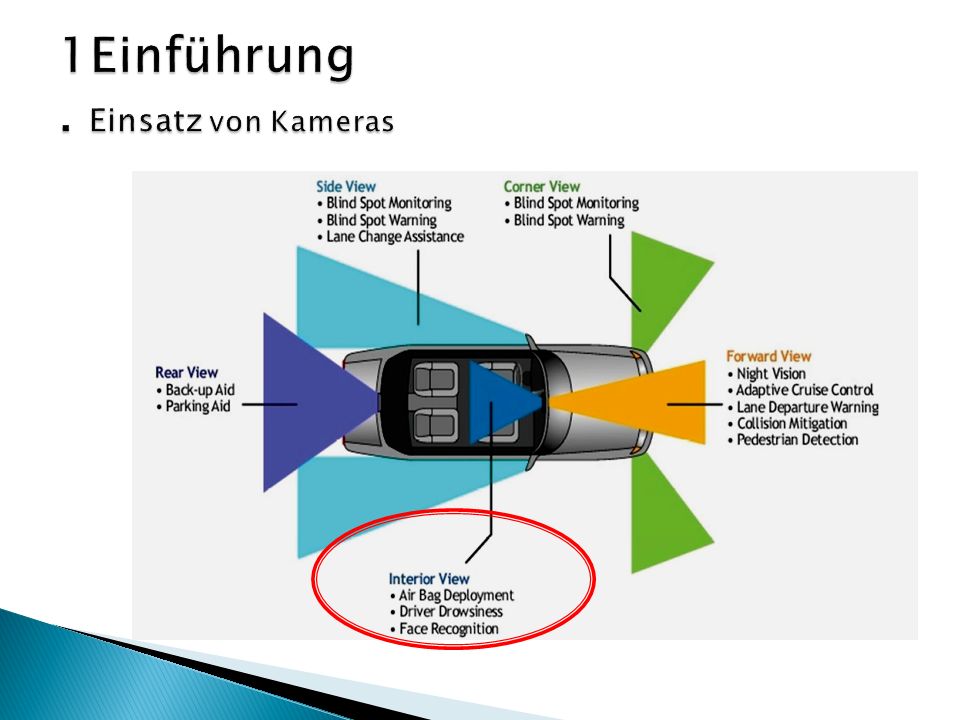
Forschungsziele: Verbesserte Sicherheit und Komfort im Automobilbereich Mensch-Maschine-Interaktion Adaptive Systeme Sensoren als Wissensquelle Kameras

13
Indikator für Aufmerksamkeit Blickrichtung Nicht-intrusive Akquisition Speicherung in zentraler Wissensbasis ADAPTION Als Eingabemodalität ◦ Blickgesteuerte Interaktion

14
Möglichst viele Bildinformationen Sammeln Bildanalyse und Anforderung Abhängigkeit von: Kameraeigenschaften Vorwissen System für Kamera Ansteuerung Bildsequenz und Informationen über Kameras für die Analyse zur Verfügung stellen.

15
1 Einführung 3 Wiss. Fragestellung 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 2 Adaptive Systeme
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 2 Adaptive Systeme.")
16
Von adaptierbaren zu adaptiven Systeme System kann selbständig an neue Bedingungen angepasst werden. bessere Szeneninterpretation Wissen über den Benutzer sammeln Benutzermodell aufbauen Adaption

17
System Mimik Sprache Gestik Graphics Audio-Signal

18
Benutzer-Kontext Fahrer dreht sich nach rechts Interaktions-Kontext Der Zustand dauert für bestimmtes Zeitintervall !! System-Aktion Warnsignal wird ausgelöst

19
Benutzer-Kontext Der Beifahrer schaut zum Fenster Interaktions-Kontext Momentan ist ein touristisches Denkmal zu sehen System-Aktion Informationen über das Denkmal werden ausgegeben

20
Benutzer-Kontext Der Fahrer gibt einen Sprachbefehl: „Fenster schließen“ Interaktion-Kontext Der Fahrer schaut nach rechts System Aktion Fenster rechts wird geschlossen Fenster schließen

21
1 Einführung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 3 Wiss. Fragestellung

22
Welche kamera-basierten Verfahren sind zur Erfassung wesentlicher Zustandseigenschaften des Fahrers geeignet? Wie gut lässt sich die Kopfhaltung des Fahrers/Benutzers bestimmen? Wie kann eine universelle Architektur zur Ansteuerung von Kameras im Fahrzeug aussehen?

23
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren.")
24
Aktueller Zustand. Frontalansicht. Seitenansicht. Augenzustand (auf/zu). Mund (auf/zu/ Form) Schlussfolgerung.Blickrichtung.Ablenkung.Müdigkeit.Wachsamkeit.Emotion Bildanalyse (Merkmalsextraktion)
. Mund (auf/zu/ Form) Schlussfolgerung.Blickrichtung.Ablenkung.Müdigkeit.Wachsamkeit.Emotion Bildanalyse (Merkmalsextraktion).")
25
Müdigkeit

26
Lidschlagrate

27
Müdigkeit Lidschlagrate Augenzustand (zu / Auf)
")
28
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren
 Augenbereich lokalisieren")
29
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren Gesicht lokalisieren
 Augenbereich lokalisieren Gesicht lokalisieren")
30
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren Gesicht lokalisieren Bild
 Augenbereich lokalisieren Gesicht lokalisieren Bild")
31
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen
 Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen")
32
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen Merkmale
 Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen Merkmale")
33
Müdigkeit Lidschlagrate Augenzustand (zu / Auf) Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen Merkmale
 Augenbereich lokalisieren Gesicht lokalisieren Bild Vorwissen Merkmale")
34
Nicht-intrusive Analyse Intrusive Analyse

35
Holistische und analytische Verfahren Holistische Verfahren Bild wird als Ganzes betrachtet Vortrainierte Daten zur Erstellung von Klassifikatoren Adaboost Support Vector Machine Neural Network Meistens für die Wiedererkennung des Gesichts oder relevante Bildregionen verwendbar Aufwändige Datenvorbereitung

36
Analytische Verfahren ( Merkmalsbasierte Verfahren) Extraktion relevanter Merkmale zur Gesichtsfindung Kanten Farbe Position der Augen Mund Nase Augenbrauen Landmarken
 Extraktion relevanter Merkmale zur Gesichtsfindung Kanten Farbe Position der Augen Mund Nase Augenbrauen Landmarken")
37
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 7 Evaluation Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 5 Kopfhaltungsanalyse
 7 Evaluation Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 5 Kopfhaltungsanalyse.")
38
Erkennung der Kopfhaltung Augenbereich lokalisieren Gesicht lokalisieren Bild Kodierung möglicher Kopfhaltungen (statische Analyse) 3D Modell erstellen (Geometrie des Gesichts)
 3D Modell erstellen (Geometrie des Gesichts)")
40
Grobe Schätzung der Kopfhaltung Information über die Richtung der Kopfhaltung ( nach links/rechts, nach oben/unten) Berechnung der Kopfhaltungswinkel horizontaler / vertikaler Drehwinkel
 Berechnung der Kopfhaltungswinkel horizontaler / vertikaler Drehwinkel")
41
Kopfhaltung Berechnung der Kopfhaltungswinkel Neue Merkmalen statt Augenerkennung Gesichtsfindung Bild Grobe Schätzung der Kopfhaltung

42
Welche relevante Merkmale kann man extrahieren ? Geometrie des Gesichts Hautfarbe Gesichtsregionen (Augen, Mund, Nase …)
.")
43
Welche relevante Merkmale kann man extrahieren ? Geometrie des Gesichts Hautfarbe Gesichtsregionen (Augen, Mund, Nase.. ) Aufwändig ( höherer Rechenaufwand )
 Aufwändig ( höherer Rechenaufwand ).")
44
Farbmodell RGB, Ycbcr, HSV Welches Threshold-Intervall ist zur Hautsegmentierung und Hintergrundextrahierung geeignet ?

45
H Darstellung CR Darstellung V Darstellung

46
H Darstellung CR Darstellung V Darstellung Gesichtsdetail bewahren

47
H Darstellung CR Darstellung V Darstellung Hintergrund entfernen Gesichtsdetail bewahren

48
H Darstellung CR Darstellung V Darstellung Hintergrund entfernen Gesichtsdetail bewahren Suche nach Hautfarbe Region

49
H Darstellung CR Darstellung V Darstellung Hintergrund entfernen Gesichtsdetail bewahren Suche nach dem gesamten Gesicht Suche nach Hautfarbe Region

50
Extraktion der Hautregion Gesichtsfindung

51
Extraktion der Hautregion

52
Gesichtsfindung Startpunkt für die Suche nach der Gesichtskontur

53
Kopfhaltung Berechnung der Kopfhaltungswinkel Neue Merkmalen statt Augenerkennung Gesichtsfindung Bild Grobe Schätzung der Kopfhaltung

54
Kann man die Richtung der Kopfhaltung direkt aus der Geometrie des Gesichts ableiten ?

55
Gesicht durch Rechtecke modellieren Position des Gesichts Seitenverhältnis Position (x, y)
")
56
Horizontale Drehung Position X

57
Vertikale Drehung Position Y

58
Kopfhaltung Berechnung der Kopfhaltungswinkel Neue Merkmale statt Augenberereich Gesichtsfindung Bild Grobe Schätzung der Kopfhaltung (X,Y)
")
59
Vorhandene Modelle Kodierung der unterschiedlichen Kopfhaltungen Verwendung von Gesichtsmerkmalen Augen/Mund/Nase

60
Abstandspunkte- statt Augenerkennung. Abstandspunkte

61
Horizontaler Winkel Vertikaler Winkel

62
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 6 Bildakquisition (Framework )
.")
63
Client/ Server Modell ◦ Bilddaten im Netzwerk für verschiedenen Bildanalyse zur Verfügung stellen ◦ Information über an das System angeschlossene Kameras Zugriff auf Kameras ◦ Java Media Framework (JMF) Datenübertragung TCP Steuerungskanal Datenkanal
 Datenübertragung TCP Steuerungskanal Datenkanal")
65
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 Bildakquisition (Framework) 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 7 Evaluation
 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 8 Zusammenfassung 4 Kamera basierte Verfahren 7 Evaluation.")
66
Gesichtserkennung ◦ Farbe ◦ Helligkeit, Schatten, Autoumgebung. Erkennung der Abstandspunkte ◦ Verdeckung (Occlusion) Modell zur Berechnung der Winkel ◦ Geometrie des Gesichts.
 Modell zur Berechnung der Winkel ◦ Geometrie des Gesichts..")
67
Gesichtserkennung ◦ Farbe ◦ Helligkeit, schatten, Auto Umgebung. Erkennung der Abstandspunkte ◦ Verdeckung (Occlusion) Modell zur Berechnung der Winkel ◦ Geometrie des Gesichts.
 Modell zur Berechnung der Winkel ◦ Geometrie des Gesichts..")
68
Testdurchführung Helligkeit und Schatten In Autoumgebung (Fahrersitzplatz, Rücksitzplatz) Kameraplatzierung (frontale Aufnahme) 3 Bildsequenzen: Bildsequenzen 1 und 2: Höhere und niedrige Helligkeit Bildsequenz 3: Schatten vorhanden
 Kameraplatzierung (frontale Aufnahme) 3 Bildsequenzen: Bildsequenzen 1 und 2: Höhere und niedrige Helligkeit Bildsequenz 3: Schatten vorhanden")
69
( 3,-72°) (0,-45° ) (0°, 0°) (0,34°) (-8°,45°) (34°,U)
 (0,-45° ) (0°, 0°) (0,34°) (-8°,45°) (34°,U)")
70
(0°,-75° ) (0°,-64°) (0°, 0°) (18°,20) (25°,46°) (90°,0°)
 (0°,-64°) (0°, 0°) (18°,20) (25°,46°) (90°,0°)")
72
Abweichung zur tatsächlicher Kopfhaltung Testdaten: ◦ (110) Bilder aus Datensatz (Pointing 04 Database) ◦ 2 Klassen : Horizontaler Drehungswinkel {-90, -75,-60,-45,-30,-15, 0,15, 30, 45, 60,75,90 } Vertikaler Drehungswinkel { -90,-60,-30,-15, 0,15,30, 60, 90 }
 Bilder aus Datensatz (Pointing 04 Database) ◦ 2 Klassen : Horizontaler Drehungswinkel {-90, -75,-60,-45,-30,-15, 0,15, 30, 45, 60,75,90 } Vertikaler Drehungswinkel { -90,-60,-30,-15, 0,15,30, 60, 90 }")
73
Gut <15° Fast 15°-20 ° Fehlerhaft >20°

75
1 Einführung 3 Wiss. Fragestellung 2 Adaptive Systeme 6 videBildakquisition (Framework) 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 4 Kamera basierte Verfahren 8 Zusammenfassung
 7 Evaluation 5 Kopfhaltungsanalyse Optische Kopfhaltungserkennung im Auto als Wissensquelle für multimodale Mensch-Maschine-Schnittstellen 4 Kamera basierte Verfahren 8 Zusammenfassung.")
76
Kameraeinsatz in Fahrzeugen Einsatz der Kopfhaltung in multimodalen und adaptiven Systeme Kopfhaltungsanalyse ◦ Gesichtsfindung (Hautfarbe ) ◦ Manipulation der Hue-und Chrominanzfarben ◦ Neue Merkmale und Modell zur Berechnung der Drehwinkel (Abstandspunkte) Framework für Bild- und Videoakquisition
 ◦ Manipulation der Hue-und Chrominanzfarben ◦ Neue Merkmale und Modell zur Berechnung der Drehwinkel (Abstandspunkte) Framework für Bild- und Videoakquisition")
77
Vielen Dank für Ihre Aufmerksamkeit !

Ähnliche Präsentationen


















: auf Flugzeugen oder auf Satelliten.>")


 Hauptseminar Smart Environments Joachim Biggel 11.12.2003.>")


