Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Entwurf superstabiler Regelkreise
Hauser Helmut Betreuer Prof. A.Hofer Institut für Regelungstechnik

2
Ausgangspunkt - L1-Theorie
G(z) LTI , BIBO-stabil w(k) e(k) Forderungen Zusammenhänge |w(k)| für alle k ||e(k)|| möglichst klein
 LTI , BIBO-stabil. w(k) e(k) Forderungen. Zusammenhänge. |w(k)| 1 für alle k. ||e(k)|| möglichst klein.")
3
Grundidee der Diplomarbeit
Vorteile der L1-Theorie Der Reglerentwurf findet direkt im Zeitbereich statt Eine Robuste Regelung und Stellgrößenbeschränkung können berücksichtigt werden Nachteile der L1-Theorie Die Reglerordnung kann sehr hoch werden von Anfangsbedingungen gleich Null wird ausgegangen Neuer Ansatz um Nachteile zu beseitigen und Vorteile zu übernehmen

4
Alte und neue Definition
L1-Theorie Eine Strecke hat l1 -Performance kleiner als l1 genau dann, wenn für die Zustandsgrößen zum Zeitpunkt Null x(0)=0 und für die Eingangsfolge |w(k)| 1 gilt, und der Betrag der Ausgangsfolge e(k) für alle Zeitpunkte k 0 unter der Schranke l1 bleibt. Equalized Performance Eine Strecke besitzt genau dann eine Equalized Performance kleiner als , wenn für die ersten n Werte der Ausgangsfolge |e(i)| gilt, und für die Eingangsfolge |w(j)| 1, j=0,1,... gilt, und die Ausgangsfolge auch weiterhin unter der Grenze bleibt |e(k)| für k n
=0 und für die Eingangsfolge |w(k)| 1 gilt, und der Betrag der Ausgangsfolge e(k) für alle Zeitpunkte k 0 unter der Schranke l1 bleibt. Equalized Performance. Eine Strecke besitzt genau dann eine Equalized Performance kleiner als , wenn für die ersten n Werte der Ausgangsfolge |e(i)| gilt, und für die Eingangsfolge |w(j)| 1, j=0,1,... gilt, und die Ausgangsfolge auch weiterhin unter der Grenze bleibt. |e(k)| für k n.")
5
Berechnung der Equalized Performance μ
Eingang w(k) LTI Ausgang e(k) Zugehöriges ARMA Modell Abschätzungen: bzw.
 LTI. Ausgang e(k) Zugehöriges ARMA Modell. Abschätzungen: bzw.")
6
Berechnung der Equalized Performance μ
Definition der 1-Norm Equalized Performance

7
Idee für den Reglerentwurf:
Superstabilität Superstabiles Polynom: Superstabiles Systeme: Wenn Nennerpolynom superstabil ist ! Idee für den Reglerentwurf: superstabilisieren minimieren

8
Reglerentwurf Strecke Regler e(k) y(k) u(k) w(k)
 y(k) u(k) w(k)")
9
Reglerentwurf 1.) Ziel des Reglers:
Auswirkung der Störung w(k) auf Ausgang e(k) optimal unterdrücken. 2.) Übertragungsfunktion von w(k) e(k) Abhängigkeit der Koeffizienten des geschlossenen Kreises von den Reglerkoeffizienten 3.) Problem läßt sich mich LP lösen wird außerhalb von LP durch Intervallhalbierung optimiert
 auf Ausgang e(k) optimal unterdrücken. 2.) Übertragungsfunktion von w(k) e(k) Abhängigkeit der Koeffizienten des geschlossenen Kreises von den Reglerkoeffizienten. 3.) Problem läßt sich mich LP lösen. wird außerhalb von LP durch Intervallhalbierung optimiert.")
10
Verbale Problemformulierung: Mathematische Problemformulierung
Reglerentwurf Verbale Problemformulierung: Wir suchen diejenigen Reglerkoeffizienten pi und qi , die unsere Übertragungsfunktion von w(k) e(k) superstabilisieren, und dabei die optimale Equalized Performance liefern. Mathematische Problemformulierung
 e(k) superstabilisieren, und dabei die optimale Equalized Performance liefern. Mathematische Problemformulierung.")
11
Beispiel System 3. Ordnung Mit L1-Theorie:
Gesamt ergibt es FIR mit 18 Ordnung Equalized Performance davon: = 3,01 -50% Ordnung +2% höheres Resultate mit neuem Ansatz: Regler-Ordnung 2 3 4 5 6 7 8 5.001 3.801 3.422 3.248 3.153 3.098 3.064

12
Pol- und Nullstellenlage des geschlossene Kreises
Reglerordnung = 8

13
Stellgrößenbeschränkung
Idee: Equalized Performance stellt eine Obergrenze für die Absolutwerte der Ausgangsfolge dar. Übertragungsfunktion Gu mit Ausgang Stellgröße zusätzliche Gleichungen Ungleichungen Zusätzliche Beschränkung für die Reglerkoeffizienten Erforderliche Ordnungen werden höher sein

14
Beispiel mit u(k) Beschränkung
Beispiel der Form: R(z) y(k) u(k) d‘(k) d(k) P(z) F(z) Forderung: |u(k)| 80 !!
 y(k) u(k) d‘(k) d(k) P(z) F(z) Forderung: |u(k)| 80 !!")
15
Vergleich: u(k) beschränkt und unbeschränkt
u = unbeschränkt Regler- Ordnung 1 2 3 4 5 6 x |u| 80 Regler- Ordnung 7 8 9 10 11 12 x

16
Resultate Mit neuem Ansatz L1-Theorie
Wenn Ordnung = 11 vorgegeben wird mit = L1-Theorie liefert Regler der Ordnung = 11 mit = Pole Nullstellen

17
Zusammenfassung - SISO
Liefert gute Ergebnisse im Störentwurf Ordnung kann vorgegeben werden Anfangszustände ungleich Null möglich Lösung mit LP möglich Vergleich mit L1-Theorie – niedere Ordnungen Stellgrößenbeschränkung Robustheitsforderungen

18
Erweiterung auf MIMO Abschätzungen Definition: ||A|| = q Maximal 1
Induktion

19
Superstabilität - MIMO
|u(k)| = 0 |u(k)| 1 Bedingung: Equalized Performance
| = 0. |u(k)| 1. Bedingung: Equalized Performance.")
20
Reglerentwurf Statische Regler Dynamische Regler

21
Reglerentwurf Statische Regler Strecke D2 D1 u(k) d(k) y(k) K
 d(k) y(k) K")
22
Reglerentwurf Analoge Idee wie im SISO-Fall Wir suchen diejenige Reglermatrix K, welche die Ungleichung ||A+BKC||<1 erfüllt, und gleichzeitig die optimale Equalized Performance liefert. Für LP wird benötigt: Gleichungen, die Abhängigkeiten widerspiegeln Ungleichungen

23
Beispiel Papiermaschine

24
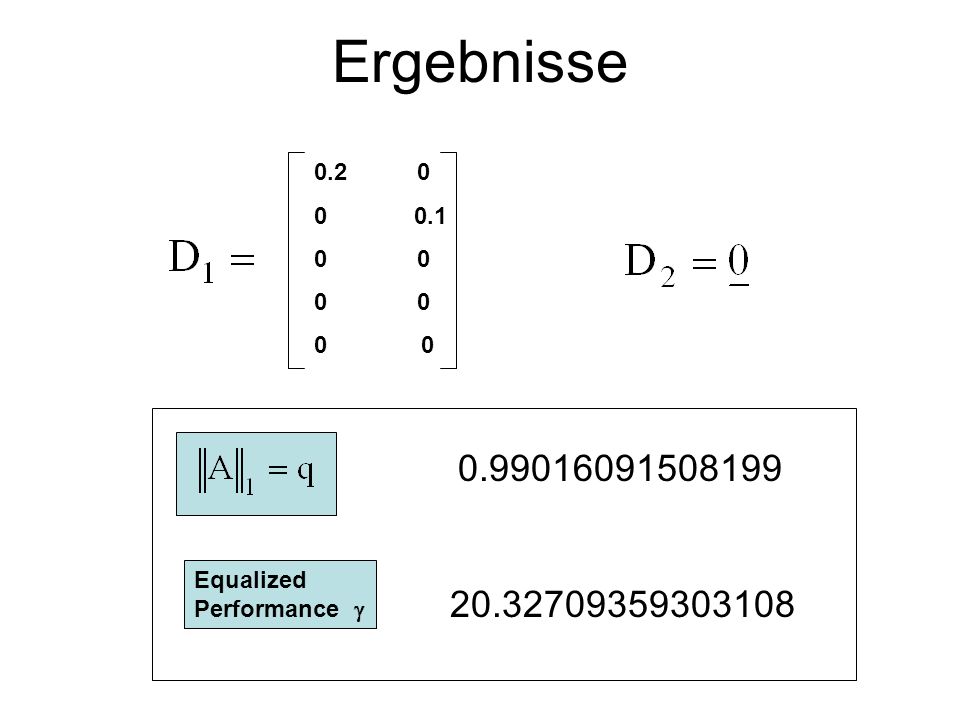
Ergebnisse 0.2 0 0 0 0 0 Equalized Performance
25
Lage der Eigenwerte O vorher X nachher

26
Zusammenfassung - MIMO
Wenige Systeme superstabilisierbar (auch mit Zustandsregelung) Oft bis knapp über der Grenze von 1 Große Systeme weiter weg von Superstabilität Regler mit Koeffizienten = Null zusätzliche Beschränkung notwendig Stark eingeschränkt in seiner Anwendbarkeit
 Oft bis knapp über der Grenze von 1. Große Systeme weiter weg von Superstabilität. Regler mit Koeffizienten = Null zusätzliche Beschränkung notwendig. Stark eingeschränkt in seiner Anwendbarkeit.")
Ähnliche Präsentationen



















