Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Kurzgutachten Zentrifugalmotor für die Fa. Etorque GmbH 04.07.2012
erstellt von Prof. Dr.-Ing. Dieter Schramm Spessartstrasse Stuttgart und Dr.-Ing. Benjamin Hesse Uedemerfelder Weg Uedem Uedem

2
Analyse der Funktion und Begutachtung eines „Zentrifugalmotors“
Beispielhafte Modellierung des Antriebsprinzips und Funktionsnachweis unter verschiedenen relevanten Bedingungen s. Anlage 1 (Matlab) und Anlage 2 (Maple) a. Aufstellung der Bewegungsgleichungen des Gesamtsystems s. Anlage 2 b. Untersuchung der Grenzfrequenz des Freilaufs Abgleich mit Versuchen, die beim Auftraggeber durchgeführt wurden Animation der Funktion des Versuchssystems (Anlage 3) Rechnerische Bestimmung des theoretischen Wirkungsgrades; Abgleich mit Messungen Vorschläge für eine Optimierung der Designparameter 5. Kurzer Abschlussbericht mit den Ergebnissen der Begutachtung Präsentation bei Vermot
 und Anlage 2 (Maple) a. Aufstellung der Bewegungsgleichungen des Gesamtsystems s. Anlage 2. b. Untersuchung der Grenzfrequenz des Freilaufs. Abgleich mit Versuchen, die beim Auftraggeber durchgeführt wurden. Animation der Funktion des Versuchssystems (Anlage 3) Rechnerische Bestimmung des theoretischen Wirkungsgrades; Abgleich mit Messungen. Vorschläge für eine Optimierung der Designparameter. 5. Kurzer Abschlussbericht mit den Ergebnissen der Begutachtung. Präsentation bei Vermot.")
3
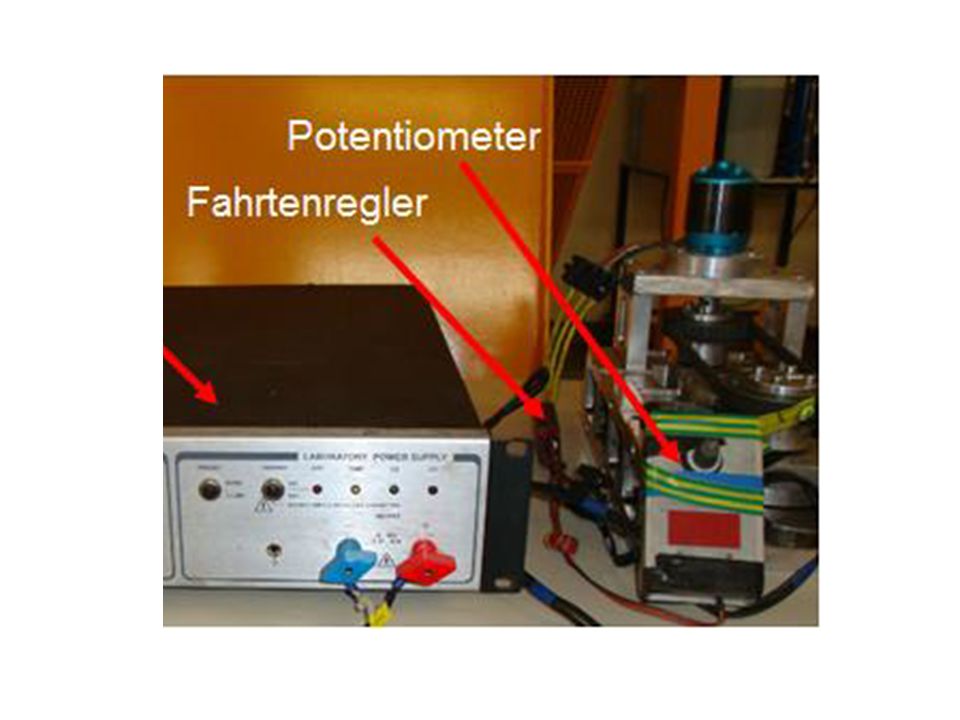
Verwendete Konfiguration I
Hochschule Eisenstadt

4
Verwendete Konfiguration I

5
Verwendete Konfiguration III
Hochschule Eisenstadt R e

6
Modellierung I Modellierung als Mehrkörpersystem mit den Abmaßen des Beispielsystems Auswertung in Matlab und Maple Keine Reibungseffekte, da keine Messwerte verfügbar Einfaches Modell für Freilauf ohne quantitativ reale dissipative Effekte Elastizität des Riemens (des Prototypsystems) nicht berücksichtigt
 nicht berücksichtigt.")
7
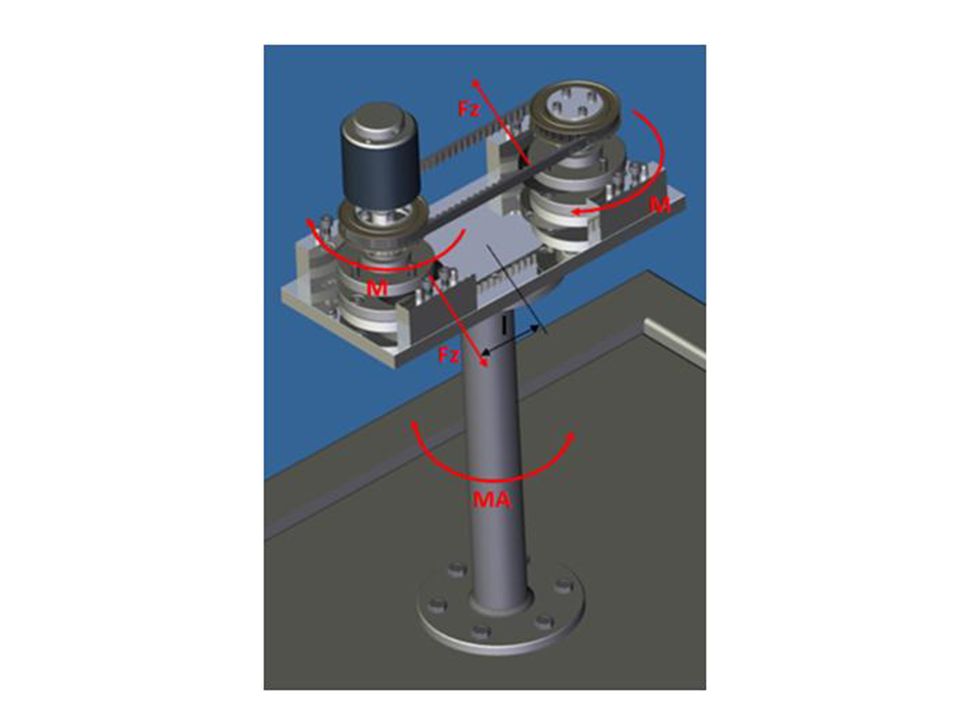
y Modellierung II x Motor (Antrieb) Trägerplatte (Abtrieb)
")
8
Grundlegende Gleichungen
Bewegungsgleichungen von Trägerplatte und Unwuchten Sperrmoment des Freilaufs in Abhängigkeit von der Relativgeschwindigkeit

9
Verwendete Gleichungen
Bewegungsgleichung der Trägerplatte (Abtrieb) bei konstanter Drehzahl des Elektromotors Sperrmoment Unwuchtkraft Lastmoment Trägheitseffekte Erforderliches Antriebsmoment des Elektromotors Trägheitseffekte Reibungseffekte
 bei konstanter Drehzahl des Elektromotors. Sperrmoment. Unwuchtkraft. Lastmoment. Trägheitseffekte. Erforderliches Antriebsmoment des Elektromotors. Trägheitseffekte. Reibungseffekte.")
10
Exzenterscheibe Drehachse Massenmittelpunkt

11
Beispiel für einen Simulationslauf Parameter wie Prototyp mit verdoppelter Unwuchtmasse
„Eingeschwungener“ Zustand Anlaufsituation

12
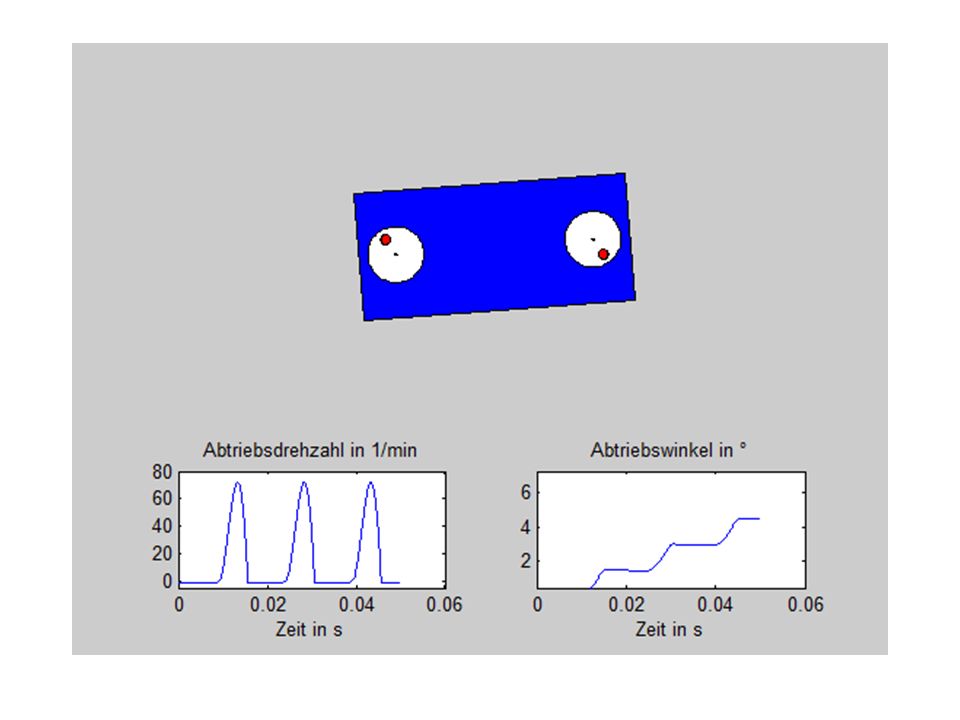
Simulationslauf Beispiel – Detailansicht Drehwinkel
Rückdrehung Freilauf „Vorschub bei einem Hub“

13
Simulationslauf Beispiel – Detailansicht Drehgeschwindigkeit
Drehgeschwindigkeit 1/min

14
Simulationslauf Beispiel – Detailansicht Sperrmoment
Sperrmoment Freilauf (Nm)
")
15
Übertragungsverhalten – Variation der Antriebsdrehzahl
Drehzahl der Trägerplatte oberhalb einer Mindestdrehzahl proportional zur Antriebsdrehzahl Unterhalb einer Mindestdrehzahl kein Betrieb möglich

16
Übertragungsverhalten – Variation des Lastmoments
Drehzahl der Trägerplatte nimmt mit zunehmender Last degressiv ab Wirkungsgrad nimmt mit zunehmender Last progressiv ab

17
Übertragungsverhalten
Größere Unwuchtmassen führen bei gleicher Antriebsdrehzahl zu einer in Richtung höherer Abtriebsdrehzahlen verschobenen Kennlinie

18
Einfluss des Freilaufs
Die Freilaufsteifigkeit hat nahezu kein Einfluss auf das Übersetzungsverhältnis Die Freilaufsteifigkeit hat einen maßgeblichen Einfluss auf den Wirkungsgrad: Versuchstechnische Bestimmung der Parameter erforderlich

19
Dynamische Sperrmomente im Freilauf
Hohe dynamische Belastung des Freilaufs Belastung proportional zur Eingangsdrehzahl zunehmend

20
Unterschiedliche Radien der Trägerplatte
Größere Radien führen zur deutlichen Verbesserung der Performance Aber: deutlich erhöhter Platzbedarf

21
Wechselnde Last Lastwechsel Rückdrehwinkel des Freilaufs
Aufgenommene Energie Drehwinkel Trägerplatte (Abtrieb) Abgegebene Energie
 Abgegebene Energie.")
23
Abweichungen von Messung und Simulation
Unerklärbare Schwankungen in Messung Min. Antriebsdrehzahl verschieden evtl. anderer Aufbau als angenommen Wirkungsgrad teilweise > 96% Wirkungsgrad E-Motor 50-70% (unbekannt) Messungen kaum vergleichbar Unpräzise Wertaufnahme Parameter nicht vollständig bekannt
 Messungen kaum vergleichbar. Unpräzise Wertaufnahme. Parameter nicht vollständig bekannt.")
24
Typische Getriebevarianten und Zentrifugalgetriebe im Vergleich
Harmonic Drive: Übersetzungsverhältnis 30: :1 Wirkungsgrad: 85% Planetengetriebe Übersetzungsverhältnis Sehr hohe Übersetzungen möglich (i = realisiert) Wirkungsgrad bei moderaten Übersetzungen (i = 30) ca. 95% Einstufiges Zahnradgetriebe Übersetzungsverhältnis <10 (gebräuchlicher Bereich) Wirkungsgrad % Zentrifugalgetriebe (etorque) Übersetzungsverhältnis > 100 stark lastabhängig und variabel
 Wirkungsgrad bei moderaten Übersetzungen (i = 30) ca. 95% Einstufiges Zahnradgetriebe. Übersetzungsverhältnis <10 (gebräuchlicher Bereich) Wirkungsgrad 95-98% Zentrifugalgetriebe (etorque) Übersetzungsverhältnis > 100 stark lastabhängig und variabel.")
25
Max Rückdrehwinkel abhängig von Frequenz und Lastmoment
Reibung im Freilauf bedingt Hysterese Drehung der Trägerplatte bei positivem Arbeitshub muss die maximale Rückdrehung bei entsprechender Last übersteigen (ansonsten keine Drehung der Abtriebswelle) Grenzfrequenz abhängig von Last und Freilauf Beispielhafte Kennlinie für einen Klemmrollenfreilauf Schwellende Last mit 5Hz Max. Lastmoment 750 Nm
 Grenzfrequenz abhängig von Last und Freilauf. Beispielhafte Kennlinie für einen Klemmrollenfreilauf. Schwellende Last mit 5Hz. Max. Lastmoment 750 Nm.")
26
Fazit Das System ist grundsätzlich funktionsfähig und als Getriebe nutzbar Das Getriebe hat eine hohe Übersetzung und einen sehr guten Wirkungsgrad im Vergleich zu anderen Getrieben Starke Abhängigkeit des Wirkungsgrades vom Freilauf Genauere Aussagen erfordern experimentelle Untersuchungen, bzw. eine genauere Kenntnis des Freilaufs Rein mechanische Freiläufe sind wegen ihrer (Reibungs-) Verluste eher schlecht geeignet Insbesondere ist zu klären, ob die Anzahl der zulässigen Lastwechsel gängiger Freiläufe ausreicht Der Wirkungsgrad ist darüber hinaus stark von der Last- und der Eingangsdrehzahl abhängig Wirkungsgradverluste durch Reibung und Dämpfung können nicht beurteilt werden. Hierzu sind experimentelle Untersuchungen erforderlich. Das Ansprechverhalten ist in der Simulation überraschend gut. Die Dynamik wird durch die Dynamik des Antriebsmotor und die Trägheit der Unwuchtscheiben maßgeblich bestimmt Empfehlung für weiteres Vorgehen Aufbau eines optimierten Modells und Einsatz präziser Meßmethoden, insbesondere zur Bestimmung der Reibung Überprüfung der Steuer- bzw. Regelbarkeit (z.B. Einstellen einer Sollabtriebsdrehzahl bei schwankender Last) Auswahl einiger weniger Anwendungen und dort Benchmark mit vorhandenen Technologien
 Verluste eher schlecht geeignet. Insbesondere ist zu klären, ob die Anzahl der zulässigen Lastwechsel gängiger Freiläufe ausreicht. Der Wirkungsgrad ist darüber hinaus stark von der Last- und der Eingangsdrehzahl abhängig. Wirkungsgradverluste durch Reibung und Dämpfung können nicht beurteilt werden. Hierzu sind experimentelle Untersuchungen erforderlich. Das Ansprechverhalten ist in der Simulation überraschend gut. Die Dynamik wird durch die Dynamik des Antriebsmotor und die Trägheit der Unwuchtscheiben maßgeblich bestimmt. Empfehlung für weiteres Vorgehen. Aufbau eines optimierten Modells und Einsatz präziser Meßmethoden, insbesondere zur Bestimmung der Reibung. Überprüfung der Steuer- bzw. Regelbarkeit (z.B. Einstellen einer Sollabtriebsdrehzahl bei schwankender Last) Auswahl einiger weniger Anwendungen und dort Benchmark mit vorhandenen Technologien.")
27
Empfehlung für weiteres Vorgehen
Aufbau eines optimierten Modells und Einsatz präziser Messmethoden, insbesondere zur Bestimmung der Reibung Abgleich mit den vorhandenen Simulationsmodellen Überprüfung der Steuer- bzw. Regelbarkeit (z.B. Einstellen einer Sollabtriebsdrehzahl bei schwankender Last) Auswahl einiger weniger Anwendungen und dort Benchmark mit vorhandenen Technologien
 Auswahl einiger weniger Anwendungen und dort Benchmark mit vorhandenen Technologien.")
28
Material aus Patenten und Vorarbeiten

29
The invention relates to inertial systems for the accumulation and conversion of energy, and can be used as a power unit to drive various machines and vehicles. According to the disclosed method, a source of mechanical oscillations is used to generate an alternating rotational torque which is applied to the working train made capable of unidirectional rotational motion. An inertial vibrator disposed axially on the working train is used as the oscillation source. The power unit putting the method into practice comprises an electrical generator, a control device and a power drive, including a base on which a first assembly is disposed, with the capability of unidirectional rotation and including a driving train for the transmis sion of operating torque and a motor with the capability of free rotation of at least one member with unbalanced mass on a shaft disposed on the first assembly axially relative to the rotation of the driving train, in so doing the kinematic linkage between it and the final driven train contains a second assembly having the capability to transmit the operating torque. The invention makes it possible to eliminate the negative feedback effect of the mechanical load on the motor.

30
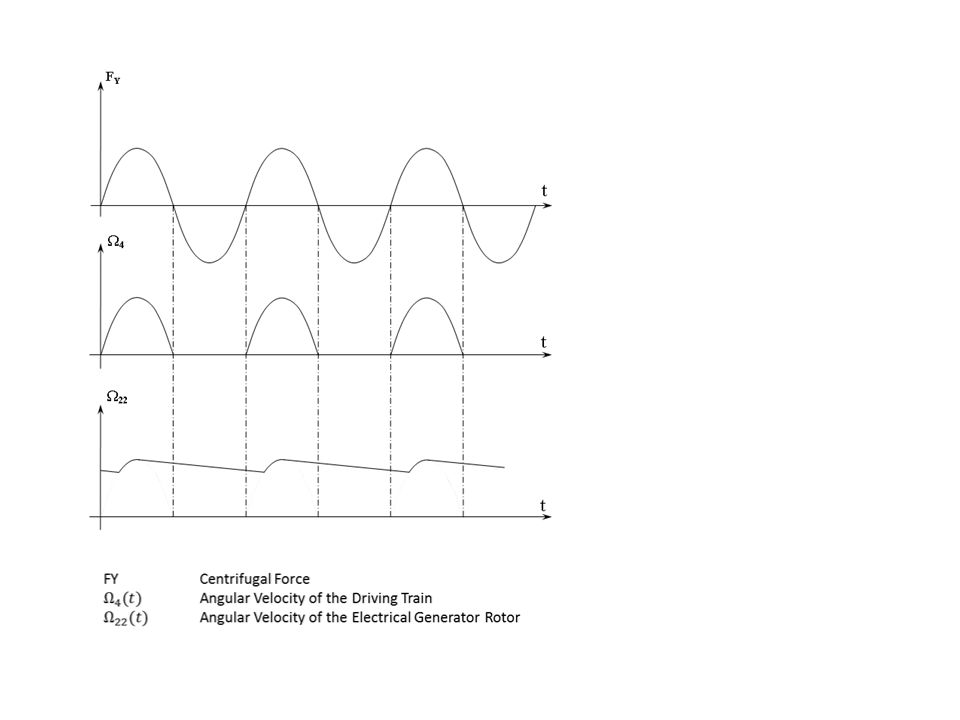
The power unit includes a base 1 carrying a fixed shaft 2 with a first freewheeling clutch 3 mounted thereon. The inner ring of the clutch 3 is fixed and its outer ring is able to rotate freely only in the direction Q (see FIG. 3 and FIG. 4). On the outer ring of the clutch 3 are attached a gearwheel 4 and a platform 5. The following are carried on the platform 5: shafts 11 and 12 whereon are mounted pinions 9 and 10 capable of free rotation and including unbalanced masses 13 and 14; electric motor 6 on the shaft 7 of which is attached driving pinion 8 disposed in meshing engagement with the driven pinions 9 and 10. The current collector 15 is designed to deliver a power supply to the electric motor 6. The pinion 16 and gearwheel 17 are mounted on a common shaft 18 with the ability to rotate. The gearwheels and pinions 4, 16, 17 and 19 form a two-stage multiplying gear designed to increase the rotational speed of the shaft 22 connected to the rotor of the electric generator 21. The shaft 22 is connected to the pinion 19 via a second freewheeling clutch 20. The latter transmits operating torque to the shaft 22 as the rotational speed of the pinion 19 increases, and breaks the kinematic chain when the rotational speed of the pinion 19 decreases, in accordance with the graph shown in FIG. 5.
. On the outer ring of the clutch 3 are attached a gearwheel 4 and a platform 5. The following are carried on the platform 5: shafts 11 and 12 whereon are mounted pinions 9 and 10 capable of free rotation and including unbalanced masses 13 and 14; electric motor 6 on the shaft 7 of which is attached driving pinion 8 disposed in meshing engagement with the driven pinions 9 and 10. The current collector 15 is designed to deliver a power supply to the electric motor 6. The pinion 16 and gearwheel 17 are mounted on a common shaft 18 with the ability to rotate. The gearwheels and pinions 4, 16, 17 and 19 form a two-stage multiplying gear designed to increase the rotational speed of the shaft 22 connected to the rotor of the electric generator 21. The shaft 22 is connected to the pinion 19 via a second freewheeling clutch 20. The latter transmits operating torque to the shaft 22 as the rotational speed of the pinion 19 increases, and breaks the kinematic chain when the rotational speed of the pinion 19 decreases, in accordance with the graph shown in FIG. 5.")
31
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

32
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

33
Fixed Shaft Base

34
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

35
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

36
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

37
Base Fixed Shaft First Freewheel Clutch Gear Wheel Platform Electric Motor Electric Motor Shaft Driving Pinion Driving Pinions Axis of Rotation Unbalanced Mass Current Collector Pinion Shaft Second Freewheel Clutch Electrical Generator Electrical Generator Rotor Foundation

39
X, Y Coordiante Axes Ω Angular Speed of Rotation of Platform 5 and Driving Gear Wheel 4 ω Angular Speed of Rotation of the Mass 14 r Radius of Rotation of Mass 14 R Radius of Translational Rotation of Axis 12 F Centrifugal Force Fy Projection of Centrifugal Force F on the X Axis

Ähnliche Präsentationen

Modulators auf einem Spartan 3E FPGA>")
 m>")

















