Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
RWTH-Aachen Universtität, Lehrstuhl Informatik 11 Dženan Džafić FOSSGIS am 06.04.2011, Heidelberg Entwicklung und Evaluierung eines Navigationssystems für Elektromotoren

2
Übersicht Projekt und Ziele Erfahrungen mit Akkus Durchgeführte Tests Ergebnisse Navigationsbeispiel Erweiterungen an AndNav2 (E-Nav) E-Nav Routing Algorithmus Ausblick
 E-Nav Routing Algorithmus Ausblick")
3
Projekte und Ziele Ziel 1: Geringerer Energieverbrauch Durch Betrachtung der Topologie Ziel 2: Verbesserung der Planung Vorkalkulation

4
Erfahrungen mit Akkus Testfahrzeug : Elektrorollstuhl Chairman C500s Batteriekapazität 2 x 74 Ah = 148 Ah Reichweite 30 – 40 km Max Steigungsbewältigung: 12°

5
Beispiel (Hinweg) A C G3700 m118,43 Ah A D E G 5435 m 51,10 Ah
 A C G3700 m118,43 Ah A D E G 5435 m 51,10 Ah")
6
Beispiel (Hinweg) 3,7 km 8,6 km 5,4 km A B C
 3,7 km 8,6 km 5,4 km A B C")
7
Beispiel (Rückweg) G F B A 8594m 2,15 Ah A C G3700 m 22,46 Ah
 G F B A 8594m 2,15 Ah A C G3700 m 22,46 Ah")
8
Beispiel (Rückweg) 3,7 km 8,6 km 5,4 km A B C
 3,7 km 8,6 km 5,4 km A B C")
9
E-Nav Routenanfrage

10
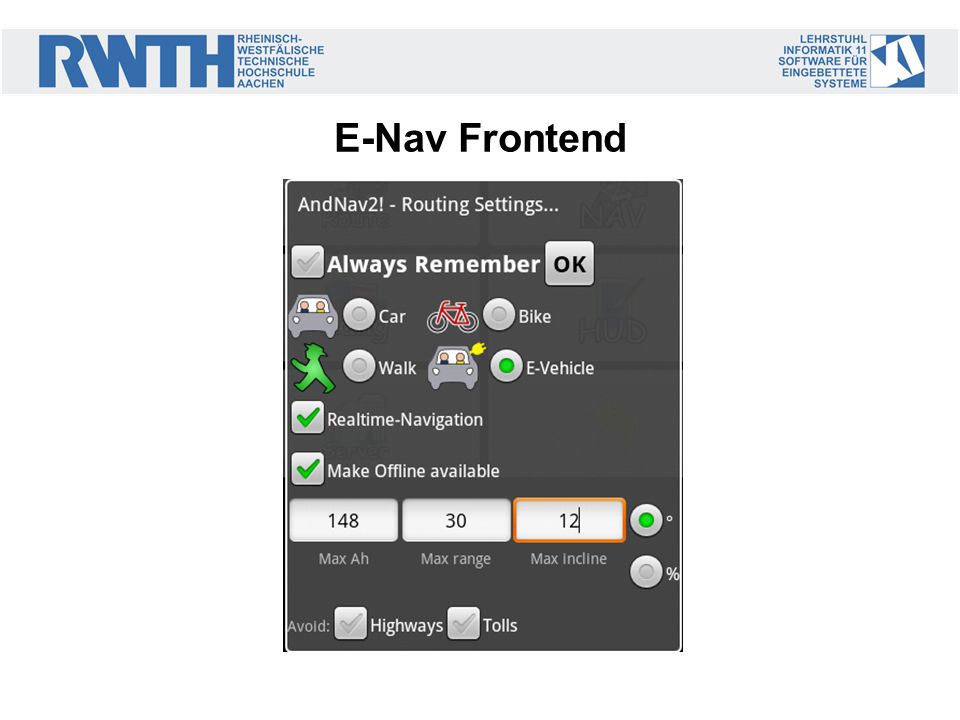
E-Nav Frontend

12
E-Nav Routing Algorithmus

13
Ausblick Ausbau der Erkenntnisse zur effizienteren Energienutzung Mit Hilfe der Akkuprognose sicher bis zum gewählten Ziel und auch wieder zurück zu gelangen Tracking-Erweiterung für E-Nav

14
Vielen Dank für Ihre Aufmerksamkeit! Webseite des Projekts: https://embedded.rwth-aachen.de/doku.php?id=forschung:enav E-Mail: dzenan.dzafic@rwth-aachen.de

Ähnliche Präsentationen



>")





 U N I V E R S I T Ä T H A M B U R G November 2011.>")






>")


