Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
“The whole is greater than the sum of its parts.” Max Wertheimer
10 Segmentierung “The whole is greater than the sum of its parts.” Max Wertheimer

2
Inhalt Einführung Segmentierung Bildverarbeitungssystem Kantenbasiert
Kantendetektion Konturverfolgung Modellbasiert Hough – Transformation Pixelorientiert Regionenbasiert Region Growing Split & Merge Wasserscheide

3
Einführung Ziel Unterscheidung von „Teilbildern/Inhalte“
Automatische Klassifikation jedes Inhalts Beispiele Medien – Schrifterkennung Biometrie – Erkennung von Personen Produktionsanlagen – Identifizierung von Teilen Medizin – Identifizierung von Zellen/Gewebe Umwelt – Auswertung von Luftaufnahmen

4
Beispiele

5
Einführung Segmentierung Zusammenfassen von Punkten zu größeren Einheiten Unterteilung des Bildes in „zusammenhängende“ Bereiche, Bildsegmente Klassifizierung Zuweisung von Bereichen in „Objektklassen“ Segmentierung ist der erste Schritt der erkennenden Bildverarbeitung Segmentierung ist eines der komplexesten Kapitel der Bildverarbeitung !

6
Schritte der Bildverarbeitung

7
Bildverarbeitungssystem
Stufen eines Bildverarbeitungssystems Bilderfassung Bildvorverarbeitung Segmentierung Merkmalsextraktion Klassifikation

8
1: Bilderfassung Objekte werden mit Sensorik erfasst
Nur erfasste Eigenschaften können ausgewertet werden

9
2: Bildvorverarbeitung
Bildmodifikation, welche den Informationsgehalt nicht bedeutend ändert Beispiele: Beleuchtungskorrekturen Rauschreduzierung Kontrasterhöhung Größenanpassung

10
3: Segmentierung Gegeben Bild B mit Bildpunkten f1,...,fn
Gesucht Regionen Ri für die gilt:

11
4: Merkmalsextraktion Merkmale beschreiben Eigenschaften von Objekten
Einfache Merkmale Umschreibendes Rechteck Mittlerer Intensität Flächeninhalt Schwerpunkt Umfang Abgeleitete Merkmale Kompaktheit Lage, Orientierung

12
5: Klassifizierung Klassifizierung von Objekten anhand ihrer Merkmale
Notwendige Voraussetzung Merkmalsanalyse / Clustering des Merkmalraums Beispiel

13
6: Erfassung von Objekten
Einfache/Heuristische Vorgehensweise Durch a-priori-Wissen Segmente identifizieren / ausschließen Segmente kleiner N Pixel werden ignoriert Segmente außerhalb des Area-Of-Interest / Region-Of-Interest werden ignoriert Größenverhältnis Farbe

14
Segmentierung

15
Segmentierung Gegeben Bild B mit Bildpunkten f1,...,fn
Gesucht Regionen Ri für die gilt:

16
Strategien Diskontinuität Kanten Ähnlichkeit
Schwellwert („lose“ Punkte) Wachstumsverfahren (Regionen)
 Wachstumsverfahren (Regionen)")
17
Segmentierung durch Detektion von Diskontinuitäten

18
Detektion von Diskontinuitäten
Detektion von scharfen, lokalen Änderungen der Bildintensität Kantenpunkte Kanten entstehen durch die Verbindung von Kantenpunkten

19
Detektion von Diskontinuitäten
Punkte-Detektoren

20
Detektion von Linien Linien-Detektoren

21
Detektion von Linien Laplace Absolute Positive

22
Kantenbasierte Verfahren
Kanten entsprechen häufig den Konturen der gesuchten Objekte Im Gegensatz zu punktbasierten Verfahren werden die gesuchten Objekte nicht als Fläche, sondern als Umrandung extrahiert Verarbeitungsschritte Hochpaß Konturverfolgung Konturverdünnung / Skelettierung / Thinning Bestimmung der umrandeten Gebiete

23
Kantentypen

24
Kantentypen

25
Reele Kanten

26
Kantenextraktion Extremum Nulldurchgang Bild Profil einer
horizontalen Linie Erste Ableitung Extremum Zweite Ableitung Nulldurchgang

27
Kantenextraktion Berechnung der Ableitung in jedem Pixel:
Ableitungsfilter 1. Ordnung (Roberts) Ableitungsfilter mit einfacher Mittelwertbildung (Prewitt, Sobel) Ableitungsfilter 2. Ordnung (Laplace) Ableitungsbilder werden (mittels Schwellwert) binarisiert
![]()
28
Beispiele A B C D A: Original B: Prewitt C: Sobel D: Laplace

29
Einfluß von Rauschen Var = 0.1 Var = 1 Var = 10

30
LoG Operator

31
Kantendetektion Sobel LoG Schwellwert Zero Cross

32
Konturverfolgung: Canny
Ziel Binärbild mit möglichst geschlossenen Konturen Einfaches Vorgehen Von Startpunkt aus wird der nächste Konturpunkt entlang eines Suchstrahls identifiziert Richtung ergibt sich aus bereits erhaltenen Punkten oder dem Gradienten Nachteil Einmalige Fehlberechnung führt zu falscher Kontur

33
Orientierung der Normale

34
Suchrichtung senkrecht zum Gradienten
Konturverfolgung Objekt Gradient f(x,y) (Grauwert) Kante y Hintergrund x Suchrichtung senkrecht zum Gradienten
 (Grauwert) Kante. y. Hintergrund. x. Suchrichtung senkrecht zum Gradienten.")
35
Gradient vs Log vs Canny

36
Hough Transformation Ziel: „Globale“ Linienerkennung
Transformiert das Segmentierungsproblem im Bildraum in ein Finden von lokalen Maxima („Punkte“) im Parameterraum Man habe n Punkte vorsegmentiert Suche Submengen dieser Punkte, welche auf Geraden liegen
 im Parameterraum. Man habe n Punkte vorsegmentiert. Suche Submengen dieser Punkte, welche auf Geraden liegen.")
37
Hough Transformation Im Parameterraum wird jeder Punkt des Bildraums durch eine Gerade abgebildet Punkte, die auf einer Gerade liegen, schneiden sich an einer Stelle (Fächern) Bildraum Parameterraum Hough-Raum
 Bildraum. Parameterraum. Hough-Raum.")
38
Hough Transformation Für einen beliebigen Punkt (xi, yi) im Bild gilt:
yi = axi + b Es gibt unendlich viele a & b, welche die Gleichung erfüllen b = -xia + yi in der ab Ebene alle a & b liegen auf einer Gerade Die ab-Geraden von ko-linearen Punkten schneiden sich!

39
Geraden Detektion Finde alle Kanten im Bild (= Hochpaß, Menge von Punkten) Unterteile den Parameterraum in Zellen Für jeden detektierten Punkt (xk, yk) im Bild: Setze ai zu einem Zellenwert aus i = (imin, imax ) Löse bi = -xkai + yk und finde bi Inkrementiere entsprechende (ai, bi) Zelle
 im Bild: Setze ai zu einem Zellenwert aus i = (imin, imax ) Löse bi = -xkai + yk und finde bi. Inkrementiere entsprechende (ai, bi) Zelle.")
40
Hough Transformation Bildraum Akkumulator Parameter- raum y x d k 1 2
3 6 7 8 5 4 Bildraum Akkumulator x d 1 2 3 6 7 8 5 4 8 1 2 3 4 5 6 Parameter- raum 7 6 5 4 3 2 1 k

41
Hough Transformation Hessesche Normalenform:
Parameter (Radon Transformation) x y ´ p´
 x. y. ´ p´")
42
Hough Transformation Punkte im Bildraum bilden sich auf Sinus-Kurven im Parameterraum ab Alle Sinus-Kurven ko-linearer Punkte schneiden sich an einer Stelle

43
Hough Transformation

44
Hough Transformation

45
Hough Transformation

46
Hough Transformation

47
Hough Transformation Kantenbild Original Ergebnis Hough-Raum

48
Hough Transformation

49
Hough Transformation Verhalten Robust gegenüber unterbrochenen Linien:
Wert wird zwar verringert, lokales Maximum bleibt Bei verrauschten Linien: Cluster mit hohen Werten anstatt diskretes Maximum

50
Hough Transformation

51
Segmentierung durch Detektion von Ähnlichkeiten

52
Schwellwertverfahren
Global: T fester Grauwert Dynamisch/adaptiv: T hängt von der Position innerhalb des Bildes ab Lokal: T hängt von den lokalen Grautönen ab (z.B. lokalen Mittelwert)
")
53
Verfahren Schwellwertverfahren Bereichswachstum Split-and-merge
Wasserscheide

54
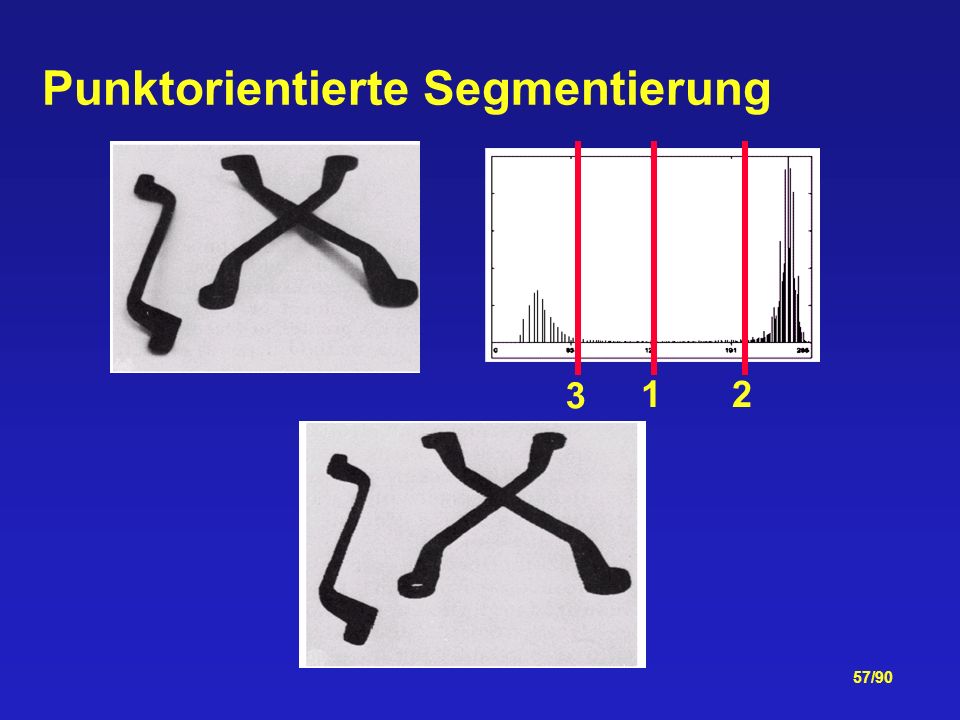
Punktorientierte Segmentierung
Einfacher Schwellwert T (Threshold) = Segmentierung aufgrund der Grauwertinformation
 = Segmentierung aufgrund der Grauwertinformation.")
55
Multi-modale Histogramme

56
Punktorientierte Segmentierung

57
Punktorientierte Segmentierung
3 1 2
58
Rauscheneinfluß Var = 10 Var = 50

59
Rauschentfernung & Schwellwert

60
Rauschentfernung in kleinen Regionen

61
Gradient & lokale Histogramme

62
Beleuchtungseinfluß

63
Beleuchtungseinfluß Erweiterung auf multimodale Histogramme

64
Beleuchtungseinfluß

65
Adaptives Schwellwertverfahren

66
Adaptives Schwellwertverfahren

67
Adaptives Schwellwertverfahren

68
Adaptives Schwellwertverfahren

69
Adaptives Schwellwertverfahren

70
Lokaler Schwellwert

71
Regionenbasierte Verfahren
Ziel Aufteilung des Bildes in Zonen maximaler Homogenität (Grauwert, Farbe, etc.) Verfahren Bottom up: Region Growing Top Down: Split & Merge Vorteil Information über Nachbarschaft Robuster bei verrauschten Bildern
 Verfahren. Bottom up: Region Growing. Top Down: Split & Merge. Vorteil. Information über Nachbarschaft. Robuster bei verrauschten Bildern.")
72
Region Growing Ausgehend von n-Ursprungspixel (Saatzellen, seed points) werden andere Pixel, die ein Homogenitätskriterium erfüllen, aggregiert R1 R2 R3
![]()
73
Parameter Anzahl & Position der Startpunkte Homogenitätskriterium
Intensität Farbe Statistiken, Textur Stopp Regelung Lokale Kriterien: Grauton/Farbe, Textur Regionsgröße und –Form (Addaptive) Ähnlichkeit zu der Region
 Ähnlichkeit zu der Region.")
74
Region Growing Setzen von n Seed Points (Initiale Regionen) - Zufällig - Aufgrund von Beurteilung des Bildinhalts Untersuchung der 4 (oder 8)-Nachbarschaft Fall1: Punkt gehört zu keiner Region & H.-Krit. erfüllt Zuordnung zur Region Fall2: Punkt gehört zu keiner Region & H.-Krit. nicht erfüllt Keine Zuordnung Fall3: Punkt gehört bereits zu einer anderen Region & Homogenitätskriterium erfüllt Regionen werden vereinigt Fall4: Punkt gehört bereits zu einer anderen Region & Homogenitätskriterium nicht erfüllt Keine Vereinigung Wiederhole 1 und 2 bis keine Änderungen mehr eintreten
-Nachbarschaft Fall1: Punkt gehört zu keiner Region & H.-Krit. erfüllt Zuordnung zur Region Fall2: Punkt gehört zu keiner Region & H.-Krit. nicht erfüllt Keine Zuordnung Fall3: Punkt gehört bereits zu einer anderen Region & Homogenitätskriterium erfüllt Regionen werden vereinigt Fall4: Punkt gehört bereits zu einer anderen Region & Homogenitätskriterium nicht erfüllt Keine Vereinigung. Wiederhole 1 und 2 bis keine Änderungen mehr eintreten.")
75
Originalbild Segmentiertes Bild
Region Growing Originalbild Segmentiertes Bild

76
Region Growing Seeds: Maximum Grautöne DG < 255, 8-connected

77
Region Growing Problem Wahl der Seed Points
Wahl des Homogenitätskriteriums Formulierung des Stop-Kriteriums Vorteile Einfache Erweiterbarkeit auf 3D Eleganteste Lösung multimodaler Historgamme Nachteile Unterschiedliche Seed Points können zu vollständig anderen Segmentierungen führen Anzahl der Regionen muß vorher festgelegt werden

78
Split & Merge Unterteilung und Verbindung von Bereichen in Quadrate entsprechend einem Homogenitäts-kriterium. Beispiele für Homogenitätskriterium: Grau-/Farbwerte identisch/ähnlich Grau-/Farbwerte im gleichen Intervall Grau-/Farbwerte ähnlich verteilt (Momentum, Textur)
")
79
Split & Merge Split Region Ri, wenn: P(Ri)=false
Merge angrenzende und homo-gene Regionen Ri und Rj, wenn: P(RiRj)=true Rekursionen beendet, wenn kein weiteres Unterteilen / Vereinigen mehr möglich ist
=true. Rekursionen beendet, wenn kein. weiteres Unterteilen / Vereinigen mehr möglich ist.")
80
Split & Merge 1 2 00 02 01 03 30 32 33 310 311 312 314 Quadtree 1 2 00 01 02 03 30 32 33 310 311 312 313

81
Merge Split Gefahr von „Overgrowing“ – zu viele Regionen
„Undergrowing“ – zu wenige Regionen

82
Split & Merge Eliminierung von kleinen Regionen infolge Overgrowing:
Suche die kleinste / eine kleine Region Ri Finde die benachbarte Region Rn zu der Ri unter Berücksichtigung des Homogenitätskriteriums am besten paßt und vereinige diese Diese Schritte werden so lange wiederholt, bis alle Regionen eine vorgegebene Mindestgröße besitzen

83
Split & Merge 32 ² 16² 8²

84
Wasserscheide Segmentierung

85
Wasserscheide Segmentierung

86
Damm Konstruktion Finde letzten Schritt vor Vereinigung M1 und M2
Finde vereinigte Menge q Dilatiere M1 und M2: Strukturelement platziert nur in q Keine Dilatation an Stellen, welche M1 und M2 vereinigen Damm sind die übrig gebliebenen Pixel innerhalb von q

87
Wasserscheide Segmentierung auf Gradientenbild

88
Über-Segmentierung der Gradientenbilder

89
Marker Konstruktion Tiefpaßfilterung
Vereine Nachbarpunkte gleichen Grautons = seeds Wasserscheide auf den Seeds => Unterteilung des Gesamtbildes in „Zellen“ Gradient des Gesamtbildes Wasserscheide lokal in jeder „Zelle“

90
Marker-Boundaries

91
Markers Größe Form Position Orientierung Relative Abstände Textur
Berücksichtigung von a-priori „Wissen“ oder „Kontext“ über das Bild Größe Form Position Orientierung Relative Abstände Textur etc. etc.

92
Wissen Berücksichtigung

93
Modellbasiertes Segmentieren
Berücksichtigung von a priori Informationen über Art und Aussehen der zu segmentierenden Objekte Mensch besitzt ein „Modell“ des Objektes im Kopf, das Segmentieren vereinfacht: Die Kreisausschnitte werden zu durchgehenden Strecken ergänzt

94
Thinning Ziel Eliminierung von kurzen Kanten hervorgerufen durch Rauschen Verdünnung von Kanten Geforderte Eigenschaften Dünnes Skelett (möglichst nur 1 Pixel) Skelett zusammengehöriger Kanten soll zusammenhängen Beibehaltung der absoluten und relativen Größen
 Skelett zusammengehöriger Kanten soll. zusammenhängen. Beibehaltung der absoluten und relativen Größen.")
95
Übergang Detektion Übergang: - zu + + zu – Innerhalb/außerhalb:
0 oder +

96
Thinning Scan-Line-Thinning
Beschränkung auf eine Richtung (horiz./vertikal) Skelett als Mittelpunkt der Positionen „Wechsel zw. Hintergrund und Objekt“ und „Wechsel zw. Objekt und Hintergrund “ Seiteneffekt: Verschiebung des Skeletts zu einer Seite hin
 Skelett als Mittelpunkt der Positionen „Wechsel zw. Hintergrund und Objekt und „Wechsel zw. Objekt und Hintergrund Seiteneffekt: Verschiebung des Skeletts zu einer Seite hin.")
97
Zhang/Suen-Algorithmus
Thinning Zhang/Suen-Algorithmus

98
Graphen-Kantenverfolgung
Kosten = fmax – (fi – fj) = fmax – fi + fj
 = fmax – fi + fj.")
99
Konturverfolgung X-Chromosom mit gefundener Kante

Ähnliche Präsentationen



>")

 U N I V E R S I T Ä T H A M B U R G November 2011.>")
Media Landesanstalt für Kommunikation Baden-Württemberg (LFK) Landeszentrale für Medien und Kommunikation.>")












>")