Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
GIS Funktionalität I: Distanz- und Bufferanalysen

2
Inhalt 1 Einleitung & Fallbeispiel 2 Modellierung von Grundlagen 3 shortest Path Analysen 4 Distanzanalysen im Netzwerk 5 Buffering 6 Literatur

3
1 Fallbeispiel

4
2 Modellierung von Graphen
- Planarer Graph: kann auf einer Ebene abgebildet werden - Knoten: Punkte - Kanten: Linien - Weg: zusammenhängende Folge von Kanten, die über Knoten verbunden sind - Für zusammenhängende Graphen gilt: 2 = V – E + P De Lange (2002: 94)
")
5
2 Modellierung von Graphen
Gewichtung von Graphen - sog. Widerstandswerte - Modellierung einseitig oder beidseitig - Analytische Darstellung in Matrixform gewichteter Graph. Nach Bill (1999:29)
")
6
2 Modellierung von Graphen
Bewertungsmatrix - Knoten- Kantendarstellung - Anfangsknoten: Zeilen - Endknoten: Spalten - Widerstandswert 0: keine Verbindung A B C D E 7 6 1 5 3 2

7
2 Modellierung von Graphen
Inzidenzmatrix - Beziehungen zwischen verschiedenen Elementen des Graphen - Anfangsknoten: 1 - Endknoten: -1 - Nicht inzidente Knoten: 0 A B C D E 1 -1 2 3 4 5 6 7

8
2 Modellierung von Graphen
Adjazenzmatrix - Beziehungen zwischen gleichartigen Elementen - Hauptdiagonale: Anzahl der Kanten, die von diesem Knoten abgehen - Endknoten: -1 A B C D E 3 -1 2 4

9
3 shortest Path Analysen
- Distanzanalysen zwischen verschiedenen Objekten - Unter Berücksichtigung exogener und endogener Variablen - exogene Variablen können als Widerstandswerte in das Modell mit einfließen - Verarbeitung der Informationen durch Algorithmen: „ Ein Algorithmus ist eine allgemeine Berechnungsvorschrift zur Lösung eines Problems, die sich aus mehreren elementaren Schritten zusammensetzt, die in einer festen Reihenfolge ausgeführt werden.“ De Lange (2002: 81)
")
10
3 shortest Path Analysen
Dijkstra Algorithmus - Kürzeste Wege von einem festgelegten Startknoten zu allen anderen Knoten - Teilmengen: 1) Menge der Knoten T, die schon zur Route dazugehören 2) Menge der von Kandidaten K, die einem Knoten der Route benachbart sind, aber noch nicht zur Route hinzugehören. 3) Menge der unberücksichtigten Knoten
 Menge der Knoten T, die schon zur Route. dazugehören. 2) Menge der von Kandidaten K, die einem. Knoten der Route benachbart sind, aber. noch nicht zur Route hinzugehören. 3) Menge der unberücksichtigten Knoten.")
11
3 shortest Path Analysen
Dijkstra Algorithmus G Graph S Startknoten Z Zielknoten [v1…v2] Menge aller Verbindungsknoten inkl. Z Distanz (u,v) Kantenlängen zwischen den Knoten u und v Q_Suche Liste über die noch nicht untersuchten Knoten Q_Distanz[v] Liste der bisher gefundenen Distanzen von S zu v Q_Vorgänger[v] Liste über den Vorgängerknoten für jeden erledigten Knoten v
 Kantenlängen zwischen den Knoten u und v. Q_Suche Liste über die noch nicht untersuchten Knoten. Q_Distanz[v] Liste der bisher gefundenen Distanzen von S zu v. Q_Vorgänger[v] Liste über den Vorgängerknoten für jeden erledigten Knoten v.")
12
3 shortest Path Analysen
Dijkstra Algorithmus – Initialisierung Q_Suche = S + [v1…vn] – Z; Q_Erledigt = leer; Für jeden Knoten v Q_Distanz[v] = unendlich; Q_Vorgänger[v] = leer; Q_Distanz[S] = 0; Q_Vorgänger[S] = leer; a b c Z S 1 2 Zeit Q_Distanz Q_Vorgänger Q_Suche Q_Erledigt S a b c Z - S, a, b, c

13
3 shortest Path Analysen
Dijkstra Algorithmus – Suche Solange (Q_Suche != leer) Sortiere Q_Suche nach Q_Distanz[v], v ist Knoten aus Q_Suche; Extrahiere Knoten u aus Q_Suche mit Q_Distanz = minimal; Streiche u aus Q_Suche; Addiere u zu Q_Erledigt; Zeit Q_Distanz Q_Vorgänger Q_Suche Q_Erledigt S a b c Z - S, a, b, c 1 2 a, b, c b, c S, a
 Sortiere Q_Suche nach Q_Distanz[v], v ist Knoten aus Q_Suche; Extrahiere Knoten u aus Q_Suche mit Q_Distanz = minimal; Streiche u aus Q_Suche; Addiere u zu Q_Erledigt; Zeit. Q_Distanz. Q_Vorgänger. Q_Suche. Q_Erledigt. S. a. b. c. Z. - S, a, b, c a, b, c. b, c. S, a.")
14
3 shortest Path Analysen
Dijkstra Algorithmus – Suche Für jeden Knoten v, der Nachbar von u ist Wenn (Q_Distanz[v] > Q_Distanz[u] + Distanz(u,v)) Q_Distanz[v] = Q_Distanz[u] + Distanz(u,v); Q_Vorgänger[v] = u; Zeit Q_Distanz Q_Vorgänger Q_Suche Q_Erledigt S a b c Z - S, a, b, c 1 2 a, b, c b, c S, a 3 S, a, b 4
) Q_Distanz[v] = Q_Distanz[u] + Distanz(u,v); Q_Vorgänger[v] = u; Zeit. Q_Distanz. Q_Vorgänger. Q_Suche. Q_Erledigt. S. a. b. c. Z. - S, a, b, c a, b, c. b, c. S, a. 3. S, a, b. 4.")
15
3 shortest Path Analysen
Dijkstra Algorithmus – Ausgabe Gebe aus: Z; U = Z; Solange (u != leer) u = Q_Vorgänger[u]; Gebe aus: u; a b c Z S 1 2
 u = Q_Vorgänger[u]; Gebe aus: u; a. b. c. Z. S")
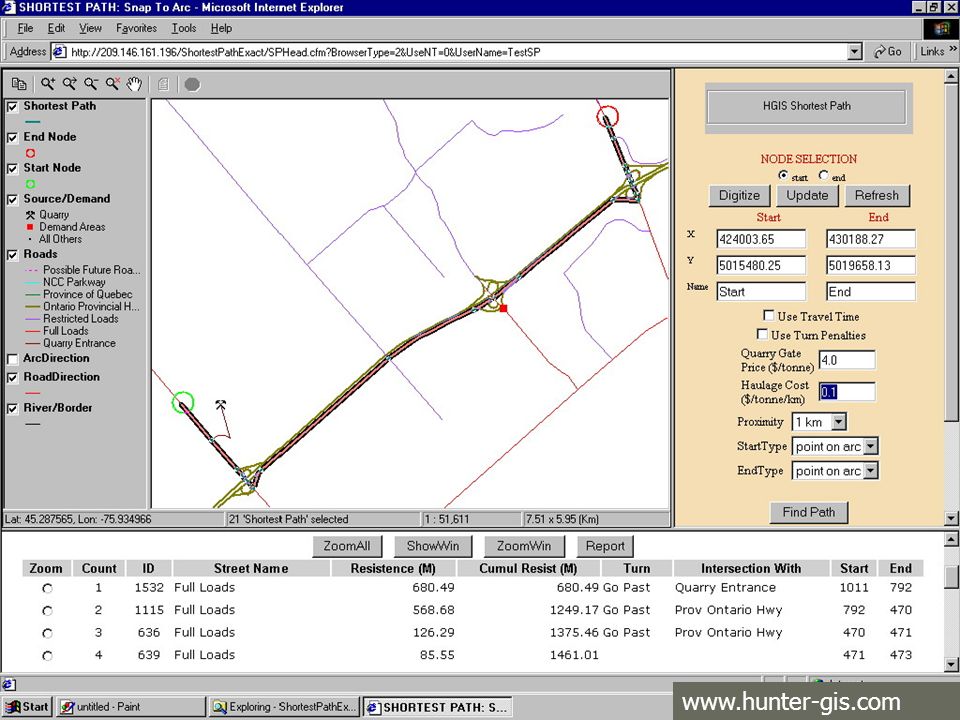
16
Shortest Path Application Toolkit v5.0
17
3 shortest Path Analysen
Floyd Algorithmus - Berechnet kürzesten Weg von jedem Knoten aus - Sonderfall Warshall Algorithmus: arbeitet ohne Widerstandswerte

18
4 Distanzanalysen im Netzwerk
Einzugsgebiete - Berechnung von maximal zulässigen Distanzen entlang vorgegebener Routen

19
4 Distanzanalysen im Netzwerk
Rundreiseproblem - Berechnung durch den „Banch and Bound“ Algorithmus - Problematik: Planung der Route, so dass jeder Punkt nur einmal erreicht wird (ausgenommen Startpunkt) - Weg soll minimiert werden 4 13 Depot (1) 12 20 2 11 10 30 3
 - Weg soll minimiert werden Depot (1)")
20
4 Distanzanalysen im Netzwerk
Rundreiseproblem W1 = W1(E(1,2), E(2,3), E(3,4), E(4,1)) = E(1,2) + E(2,3) + E(3,4) + E(4,1) = = 74 1 2 3 4 20 10 13 11 12 30 De Lange (2002: 98)
, E(2,3), E(3,4), E(4,1)) = E(1,2) + E(2,3) + E(3,4) + E(4,1) = = De Lange (2002: 98)")
21
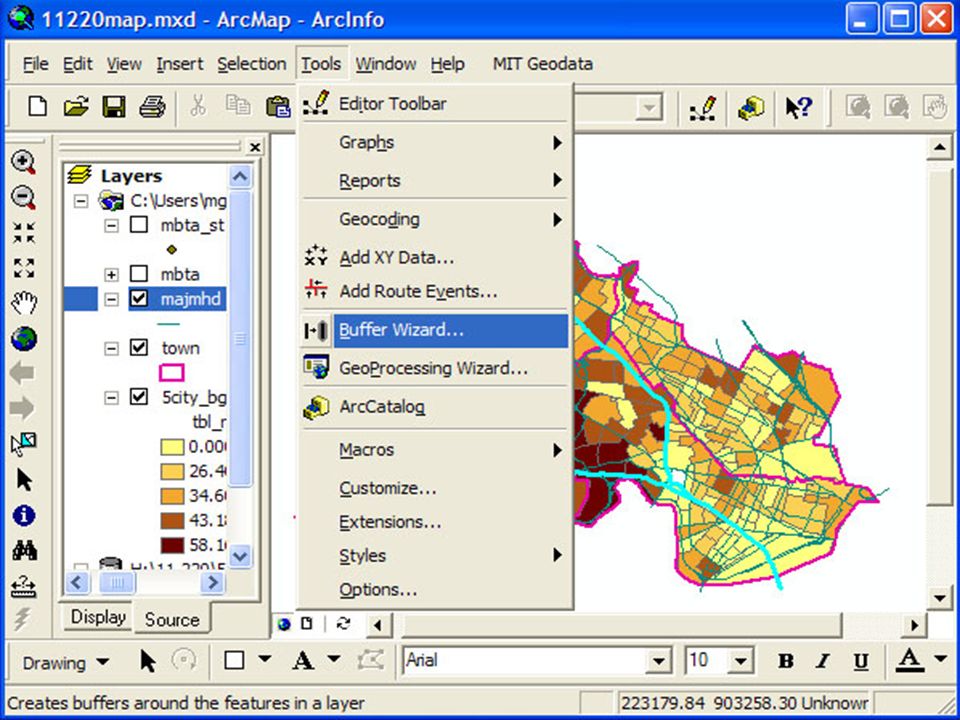
5 Buffering - Buffer sind im Durchmesser fest definierte Flächen, die um Punkte, Linien oder Polygone gelegt werden - Unterschiedliche Modellierung im Raster- und Vektorenmodellen

22
5 Buffering Zonengenerierung im Vektormodell
- Unterscheidung in kreisförmige und rechteckige Buffer - Bei Linienpuffer: Parallelengenerierung - Modellierung von Linien- und Flächenbuffer sind gleichzusetzen Bill (1999: 33)
")
24
5 Buffering Zonengenerierung im Vektormodell

25
5 Buffering Zonengenerierung im Vektormodell

26
5 Buffering Zonengenerierung im Vektormodell

28
5 Buffering Zonengenerierung im Rasterdatenformat
- Klassifizierung: Raster innerhalb der Buffer- zone werden mit den selben Attributeigenschaften belegt - Abstandstransformation: Raster werden je nach Abstand zum Objekt mit unterschiedlichen Attributen versehen

29
5 Buffering Originalmatrix Abstandstransformation * 3 2 1 4

30
5 Buffering euklidische Distanz Manhattandistanz 3 2 1 4 6 5 4 3 2 1 7

31
5 Buffering Reklassifizierung - Vermeidung von Redundanzen
- Zusammenfassung von Rasterzellen mit unterschiedlichen Attributen zu einheitlichen Klassen

32
6 Literatur Bill R. (1999): Grundlagen der Geo-Informationssysteme. Band 1. Heidelberg. Bill R. (1999): Grundlagen der Geo-Informationssysteme. Band 2. Heidelberg. Castle(1993): Profiting from a Geographic Information System. Fort Collins. De Lange N. (2002): Geoinformatik in Theorie und Praxis. Berlin. Heywood I., S. Cornelius & Carver S. (2002): An Introduction To Geographical Information Systems. Harlow. Laurini R. & D. Thompson (1992): Fundamentals of Spatial Informations Systems. London. Longley P.A., M.F. Goodchild, D.J. Maguire & D.W. Rhind (2001): Geographic Information Systems and Science. Chichster. Yeung (2002): Concepts and techniques of Geographic Information System. New Jersey. Freund E. (2004): Institut für Roboterforschung. JSI Research & Training Institute, Inc. (2004): Lange W. & D Exner (2004): Institut für Medieninformatik und technische Informatik. FH Flensburg.
: Grundlagen der Geo-Informationssysteme. Band 2. Heidelberg. Castle(1993): Profiting from a Geographic Information System. Fort Collins. De Lange N. (2002): Geoinformatik in Theorie und Praxis. Berlin. Heywood I., S. Cornelius & Carver S. (2002): An Introduction To Geographical. Information Systems. Harlow. Laurini R. & D. Thompson (1992): Fundamentals of Spatial Informations Systems. London. Longley P.A., M.F. Goodchild, D.J. Maguire & D.W. Rhind (2001): Geographic Information Systems and Science. Chichster. Yeung (2002): Concepts and techniques of Geographic Information System. New Jersey. Freund E. (2004): Institut für Roboterforschung. JSI Research & Training Institute, Inc. (2004): Lange W. & D Exner (2004): Institut für Medieninformatik und technische Informatik. FH Flensburg.")
Ähnliche Präsentationen




 Weg>")

 Prof. Th. Ottmann.>")
>")






 Wege Prof. Dr. Th. Ottmann.>")
 Prof. Th. Ottmann.>")
 Prof. Th. Ottmann.>")
 T. Lauer.>")
>")

