Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Lösung der elastischen Wellengleichung auf einem variablen FD-Gitter Daniel Köhn und Thomas Bohlen Graz, den 24. Januar 2005

2
Einführung in die adaptive FD-Modellierung Kantenlänge L L/2 Vs 1 Vs 2 >> Vs 1

3
FD-Diskretisierung auf einem homogenen Gitter Vs 1 Beachte Gitterdispersion: dh 1 /n mit 1 =Vs 1 /f max n = 12 (2.Ordnung) = 8 (4.Ordnung) Vs 2 >> Vs 1 L/2 oversampled
 = 8 (4.Ordnung) Vs 2 >> Vs 1 L/2 oversampled")
4
FD-Diskretisierung auf einem adaptiven Gitter Vs 1 Beachte Gitterdispersion: dh 1 /n mit 1 =Vs 1 /f max n = 12 (2.Ordnung) = 8 (4.Ordnung) Vs 2 >> Vs 1 L/2
 = 8 (4.Ordnung) Vs 2 >> Vs 1 L/2")
5
Rechenzeitersparnis Rechenzeit 2D: 1/25 Rechenzeit 3D: 1/125

6
Implementierung des adaptiven FD-Codes Nach Jastram (1992)
")
7
Testproblem: homogener Raum (1x1 m), umgeben von Luft 100x100 Gitterpunkte dt = 3e-6 s Rechenzeit: 40000 Zeitschritte Test: 2D-Modellierung eines homogenen Raumes Verwendeter FD-Code: - Velocity-Stress Formulierung der elastischen Wellengleichung - Standard Staggered Grid (SSG) - FD-Operatoren 2.Ordnung => zu interpolierende Variablen: s yy, v x
, umgeben von Luft 100x100 Gitterpunkte dt = 3e-6 s Rechenzeit: Zeitschritte Test: 2D-Modellierung eines homogenen Raumes Verwendeter FD-Code: - Velocity-Stress Formulierung der elastischen Wellengleichung - Standard Staggered Grid (SSG) - FD-Operatoren 2.Ordnung => zu interpolierende Variablen: s yy, v x")
8
Test: 2D-Modellierung eines homogenen Raumes

9
Analyse der Instabilität

10
Definition des Instabilitätszeitpunktes

11
Einfluss unterschiedlicher Interpolationsverfahren auf den Instabilitätszeitpunkt Hypothese: Addition der Interpolationsfehler führt zur Instabilität ?

12
Modellierung des Interpolationsfehlers durch multiplikativen Gaussschen Noise S yy (j,i) = S yy (j,i) (1+ ) v x (j,i) = v x (j,i) (1+ wobei, [-0.02, 0.02]
![Modellierung des Interpolationsfehlers durch multiplikativen Gaussschen Noise S yy (j,i) = S yy (j,i) (1+ ) v x (j,i) = v x (j,i) (1+ wobei, [-0.02, 0.02]](http://images.slideplayer.org/1/644760/slides/slide_12.jpg "Modellierung des Interpolationsfehlers durch multiplikativen Gaussschen Noise S yy (j,i) = S yy (j,i) (1+ ) v x (j,i) = v x (j,i) (1+ wobei, [-0.02, 0.02]")
13
Modellierung des Interpolationsfehlers durch multiplikativen Gaussschen Noise => Instabilität ist nicht allein auf Interpolationsfehler zurückzuführen. Entwicklung der L 1 -Norm (vx, multiplikativer Noise)
.")
14
Analyse des Wellenzahl-Spektrums im Übergangsbereich zwischen groben und feinem Gitter

15
Wellenzahl-Spektrum und L 1 -Norm als Funktion der Zeit

16
Der Einfluß des groben Gitters Nyquist-Wellenzahl feines Gitter Nyquist-Wellenzahl grobes Gitter Quellsignal Coarse Grid Nyquist Peaks

17
Stabilisierung des adaptiven FD-Codes

18
Response des 1D-Butterworth-Filters zur Unterdückung der Coarse Grid Nyquist Peaks Response des 1D-Butterworth-Filters zur Unterdückung der Coarse Grid Nyquist Peaks Nyquist-Wellenzahl feines Gitter Nyquist-Wellenzahl grobes Gitter

19
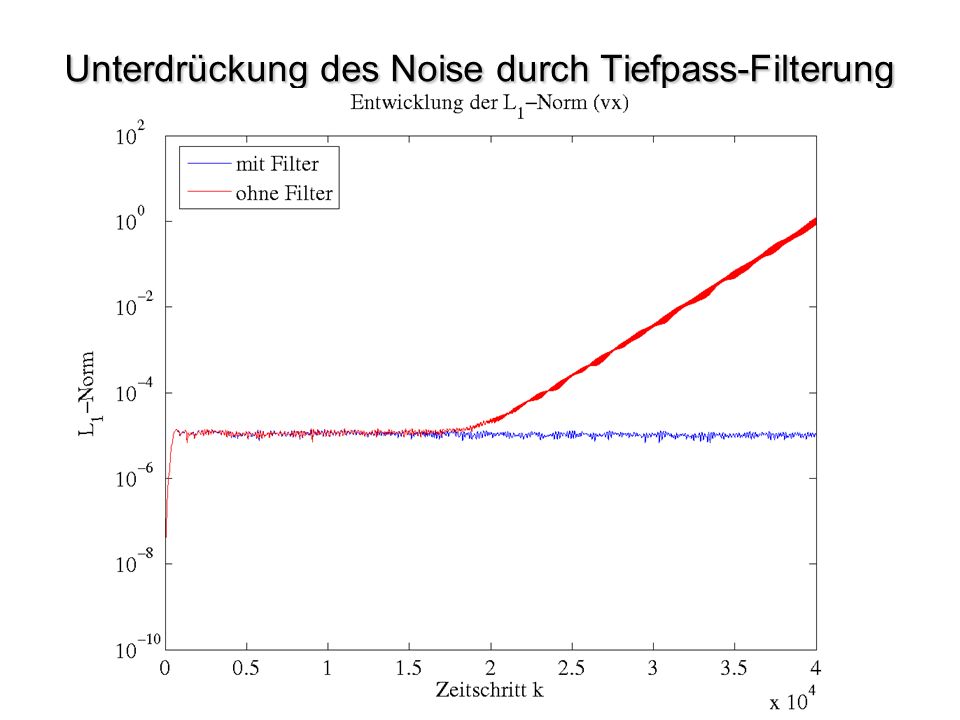
Unterdrückung des Noise durch Tiefpass-Filterung Unterdrückung des Noise durch Tiefpass-Filterung

21
Rechenzeitersparnis: Testproblem Rechenzeitersparnis: Testproblem Homogenes Gitter... 433.09 s Adaptives Gitter... 293.77 s Relative Rechenzeit adaptiv/homogen... 67 % Theoretisch maximal möglich... 63 %

22
Zusammenfassung Die Amplitude des Interpolationsfehlers (multiplikativer Noise) wächst während der Rechnung stetig an. Das Auftreten der Coarse Grid Nyquist Peaks führt aufgrund der Verletzung des Nyquist-Kriteriums des groben Gitters zur Entstehung einer numerischen Instabilität. Diese wächst exponentiell mit der Zeit an. Eine Tiefpassfilterung des k-Bereichs unterhalb der Nyquist- Wellenzahl des groben Gitters führt zu einer Stabilisierung des adaptiven FD-Codes.

23
Ausblick Implementierug einer Filterung im Orts-Bereich (Parallelisierung). Genauigkeitstest anhand geologischer Beispiele: - Probleme mit hohen Vp/Vs-Verhältnissen - Auflösung kleinskaliger Strukturen 3D-Parallelisierung

Ähnliche Präsentationen

 M. Lang>")








, CAU Kiel>")








