Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren

2
Service-Roboter Fahrerloses Fahrzeug mit Stereo-Videosensorik

3
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren

4
Beispiel für einen Kurs mit 2 Geradensegmenten und einem Kreissegment geplanter Kurs gefahrener Kurs a M1M1 M3M3 M4M4 M2M2 Landmarken

5
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren Kellergang mit erkennbaren Landmarken

6
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren Zu bestimmen sind: Position P, Richtungswinkel Bekannt ist: Landmarke M yFyF xFxF x WF y WF xWxW yWyW P x FM yFMyFM M

7
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren Die Position des Fahrzeuges kann aus der Markenposition und den Sensordaten ermittelt werden, wenn bekannt ist.

8
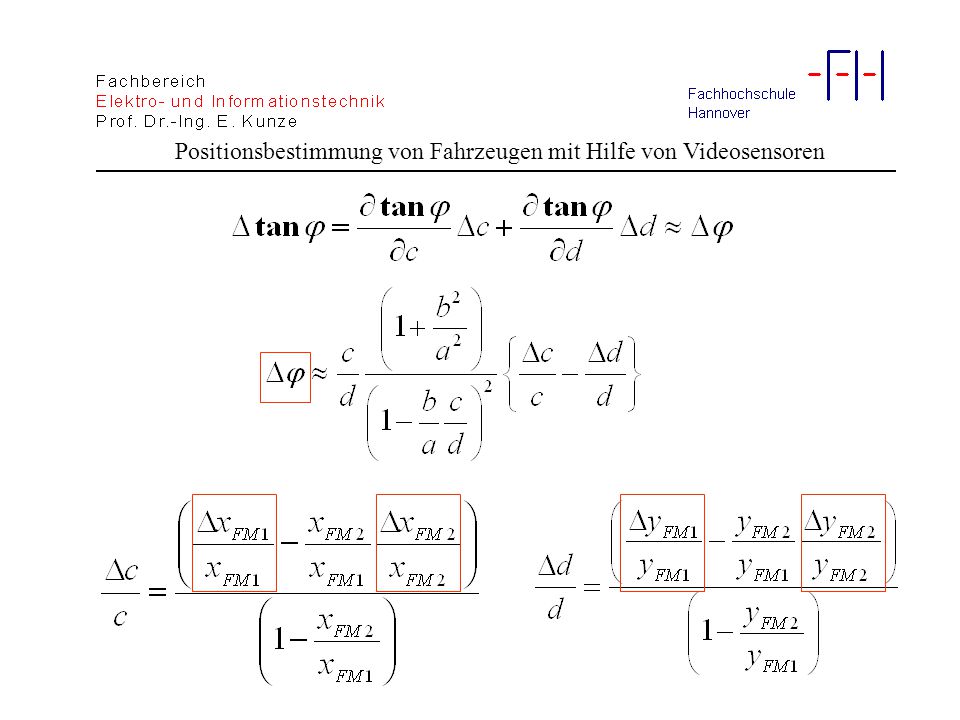
Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren Fehlerrechnung:

9
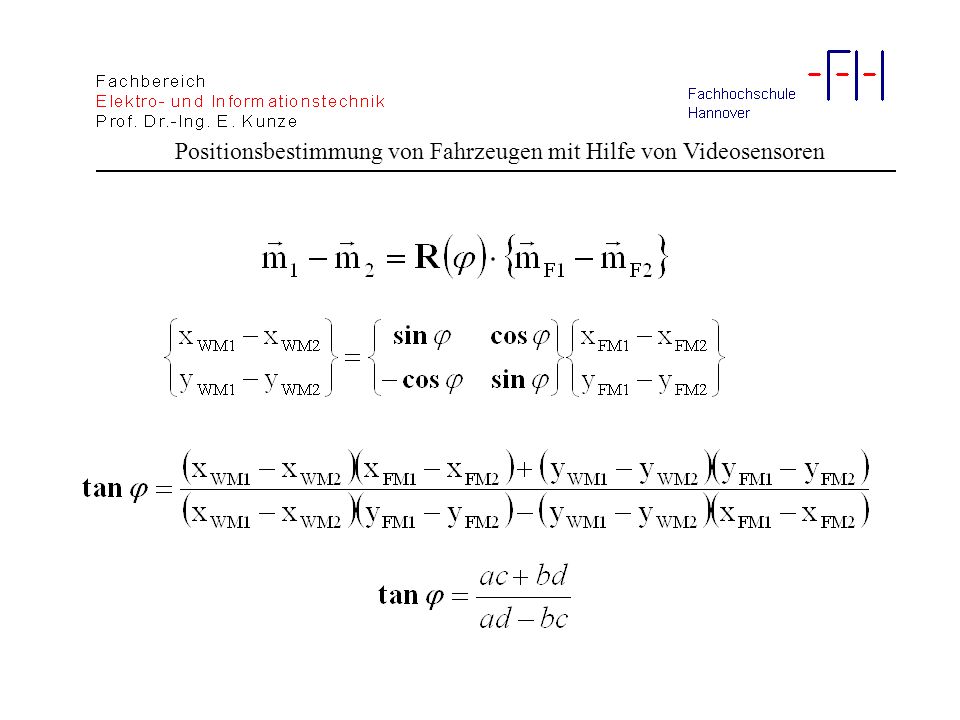
Position und Richtung aus 2 Markenpositionen xWxW yFyF xFxF yWyW x WF y WF M1M1 P M2M2 Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren

12
M1 M2 Meßabweichungen: fx = ± 3% (2%) fy = ± 5% (3%) x WF y WF x WF = ± 24cm (±14cm) y WF = ± 19cm (±12cm) x WF = ± 27cm (±17cm) y WF = ± 28cm (±16cm) xFxF yFyF
 fy = ± 5% (3%) x WF y WF x WF = ± 24cm (±14cm) y WF = ± 19cm (±12cm) x WF = ± 27cm (±17cm) y WF = ± 28cm (±16cm) xFxF yFyF")
13
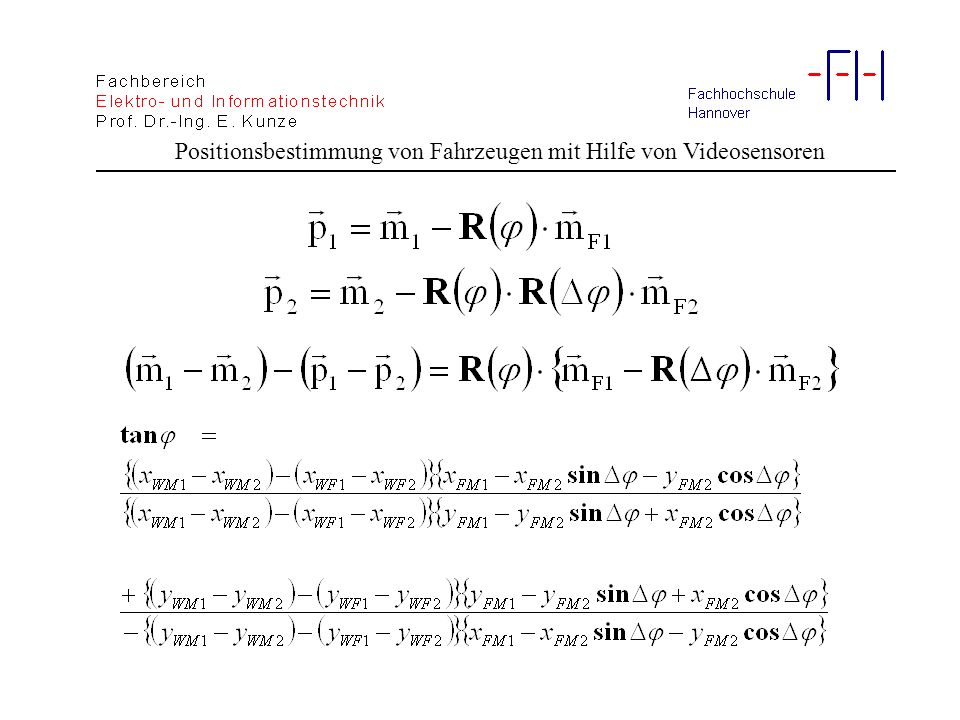
Position und Richtung aus 2 Markenpositionen xWxW yWyW x WF y WF M1M1 P1P1 M2M2 P2P2 Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren

15
Zusammenfassung Stereo-Videodensoren eignen sich für die Navigation Fahrerloser Fahrzeuge und von Service-Robotern. Die Fahrzeugposition kann mit Hilfe natürlicher Landmarken bestimmt werden. Genauigkeit z. Z. ± 30cm. Zur Bestimmung von Position und Richtung sind mindestens 2 Landmarken erforderlich. Die sequentielle Erfassung von 2 Landmarken führt zu unpraktikablen Lösungen. Positionsbestimmung von Fahrzeugen mit Hilfe von Videosensoren

Ähnliche Präsentationen











 nach sortiert werden.>")







