Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
GPS und Inertialsysteme
Seminar Zur Geoinformation GPS und Inertialsysteme Von: Peter Heinrich Betreuer: H-J Fuhlbrügge

2
Überblick Sensornavigation (Thomas Telega)
GPS und Inertialsysteme (Peter Heinrich) GPS und Mobilfunk (Lucas Schult) Routenplanung (Christian Nitsche)
 GPS und Mobilfunk (Lucas Schult) Routenplanung (Christian Nitsche)")
3
Inertialsysteme / Inertiale Messysteme
Gliederung GPS Inertialsysteme / Inertiale Messysteme Zusammenfassung

4
GPS NAVSTAR GPS Unterteilung in Raumsegment Kontrollsegment
( NAVigation Satellite Timing And Ranging – Global Positioning System ) seit 1977 im Einsatz Unterteilung in Raumsegment Kontrollsegment Nutzersegment Raumsegement: 24 Satelliten 6 Bahnebenen 20200 km Höhe 12 h Kontrollsegment: 5 Stationen Kontrolle und Steuerung Bestimmung der Satelliten Bahnen und GPS Zeiten Nutzersegment: Antennen Empfangänger Stromversorgung
 seit 1977 im Einsatz. Unterteilung in. Raumsegment. Kontrollsegment. Nutzersegment. Raumsegement: 24 Satelliten. 6 Bahnebenen km Höhe. 12 h. Kontrollsegment: 5 Stationen. Kontrolle und Steuerung. Bestimmung der Satelliten Bahnen und GPS Zeiten. Nutzersegment: Antennen. Empfangänger. Stromversorgung.")
5
Messprinzip Satelliten als hochfliegende Festpunkte
Räumlicher Bogenschnitt ( Streckenmessung ) 2 Trägerfrequenzen Trägerphasenmessung Codemessung Trägerfrequenzen mit aufmodulierten Codes L1 = 1,57 GHZ ( C/A-und P-Code) L2 = 1,23 GHZ ( P-Code ) Trägerphasenmesssung: Codemessung:
 2 Trägerfrequenzen. Trägerphasenmessung. Codemessung. Trägerfrequenzen mit aufmodulierten Codes. L1 = 1,57 GHZ ( C/A-und P-Code) L2 = 1,23 GHZ ( P-Code ) Trägerphasenmesssung: Codemessung:")
6
Differential GPS Referenzempfänger
Ermittelung der Abweichungen zum Sollwert Berechnung der Korrekturwerte Übermittelung der Korrekturwerte über LW UKW RDS

7
Vergleich der Verfahren
Messprinzip Genauigkeit [m] Systempreis [€] GPS – Navigation Codemessung ~ 10 << 500 DGPS – Navigation (+ Korrekturdatenempfänger) 1 – 5 500 – 1.000 Phasenmessung 0.3 – 1 < 5.000
 1 – – Phasenmessung. 0.3 – 1. <")
8
Fazit Aufgrund der Genauigkeit und den Fehlereinflüssen, ist GPS oder DGPS alleine nicht ausreichend für die Navigation. Zusammenarbeit mit anderen „autonomen Systemen“ Fehlereinflüsse: Satellitenkonstellation Satellitenbahnfehler ~4,2m Satellitenuhrenfehler ~0,9m Einflüsse der Ionosphäre und Troposphäre Mehrwegeeffekte Signalstörungen ( Verlust / Rauschen ) => ~ 10m
 => ~ 10m.")
9
Navigationssysteme

10
Inertiale Messsysteme
Grundidee: Messen der Beschleunigung und der Dreharten an den drei Achsen eines fahrzeugspezifischen Koordinatensystems

11
Definition eines Inertialsystems
Ein dreidimensionales kartesisches Koordinatensystem, welches nicht beschleunigt und auch z.B. die Rotationsschwankungen der Erde, aber auch die elliptische Bahn der Erde um die Sonne verursachen Beschleunigungen nicht rotierend ist. z.B. muss die Eigenrotation der Erde berücksichtigt werden Es besitzt eine absolute Zeit, (gleiche Zeit an allen Orten) aber kein Gravitationsfeld (rechnerischer Schwebezustand)
 aber kein Gravitationsfeld. (rechnerischer Schwebezustand)")
12
Merkmale eines Inertialsystems
Es gelten die newtonschen Bewegungsgleichungen Ist durch die Galileische Transformation charakterisiert

13
Newtonsche Bewegunsgleichung
Trägheitsprinzip Ein sich selbst überlassener Körper, auf den keine resultierende Kraft wirkt, bewegt sich gerade und gleichförmig

14
Galileische Relativitätsprinzip und Transformation
besagt, dass alle Inertialsysteme gleichwertig sind Galileische Transformation Sie besagt, dass jedes Inertialsystem in jedes andere Inertialsystem durch eine Transformation überführt werden kann.

15
Beispiele Inertialer Systeme

16
Inertiale Vermessung Die Vermessung mit Hilfe von Sensoren, die Bewegungen eines Körpers gegenüber dem Inertialraum wahrnehmen.

17
Inertiale Messsysteme
gehören zu den Trägheitsmessystemen bestehen aus drei zueinander orthogonalen Beschleunigunssensoren (z.B. Kreisel) Orientierung im Raum muss jederzeit bekannt sein. Beispiele sind Plattform(festes) Systeme Plattformstabilisierte Systeme
 Orientierung im Raum muss jederzeit bekannt sein. Beispiele sind. Plattform(festes) Systeme. Plattformstabilisierte Systeme.")
18
Plattform(festes) Systeme Strapdown Systeme
Sensoren sind fest mit dem Fahrzeug verbunden Kreisel messen Orientierungsänderung Nach Auswertung der Messung kann zu jedem Zeitpunkt die Lage und der Ort des Körpers bestimmt werden arbeiten relativ und benötigen Informationen über Startpunkt Anfangsrichtung

19
Plattformstabilisierte Systeme
Sind Systeme, die eine Ebene (Plattformebene) in einer bestimmten Ausrichtung gegenüber dem Inertialen Raum halten sollen. (z.B. mechanisch mit Hilfe von Servomotoren)
 in einer bestimmten Ausrichtung gegenüber dem Inertialen Raum halten sollen. (z.B. mechanisch mit Hilfe von Servomotoren)")
20
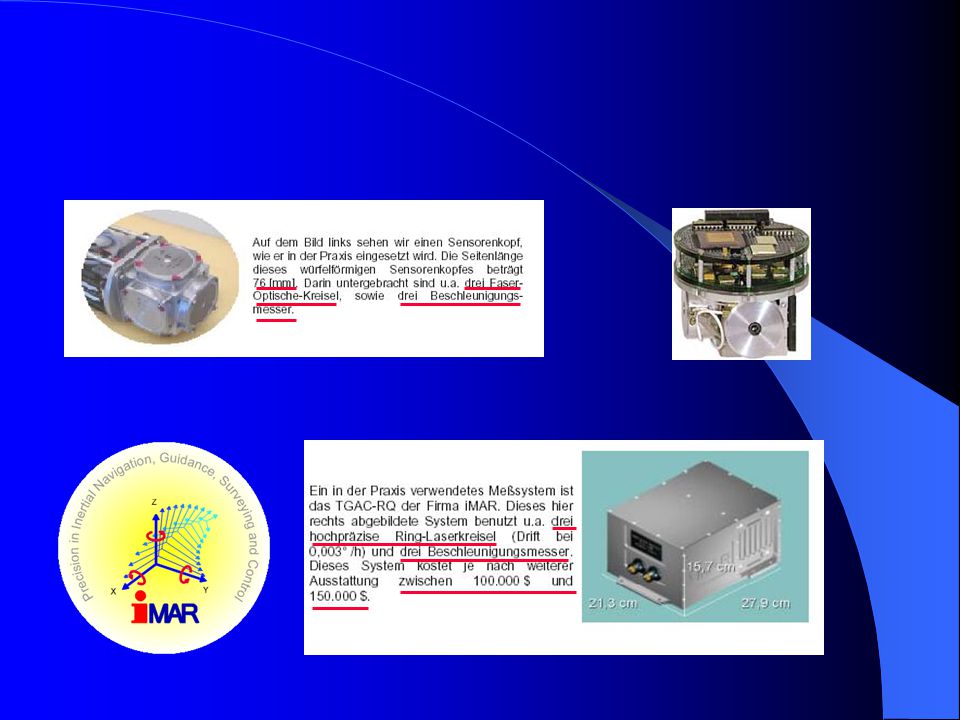
Inertiale Messeinheit

21
Sensoren in Inertialen Messystemen
Tachometer Radsensoren Odometer (Sensoren des ABS) Kreisel
 Kreisel.")
22
Kreisel heute geläufigste Form der Sensoren ständig verfügbar
über kurze Zeitintervalle deutlich bessere Fehlereigenschaften als GPS

23
Arten von Kreiseln Mechanische Kreisel piezo-elektr. Vibrationskreisel
Optische Kreisel Ringleiterkreisel Glasfaserkreisel

24
Mechanische Kreisel bsp.: Wendekreisel schnell rotierende Masse
um 3 Achsen beweglich teuer

25
Vibrationskreisel piezo-elekt. Vibrationskreisel günstig

26
Optische Kreisel Faser Optischer Kreisel
Preis und Größe zwischen mech. und piezo.-elektr. Kreiseln Leistungsfähigkeit erreicht fast mech. Kreisel in Zukunft vielleicht die meist verwendeten Kreiseltypen

27
Genauigkeiten von Kreiseln
Genauigkeit ist abhängig von Temperatur Messbereich Auflösung Nullpunkt ( Reproduzierbarkeit / Stabilität / g-Empfindlichkeit) Rauschen magnetische Empfindlichkeit
 Rauschen. magnetische Empfindlichkeit.")
28
Inertiale Messsysteme (Vorraussetzungen)
Definition der einzelnen Koordinatensysteme (Messkoordinatensystem (allg. kein I-System) / „Bezugs-“ Inertialsystem) Formulierung der Transformationsgleichung vom Messkoordinatensystem ins Navigationskoordinatensystem
 / „Bezugs- Inertialsystem) Formulierung der Transformationsgleichung vom Messkoordinatensystem ins Navigationskoordinatensystem.")
29
Positionierung des IM im KFZ
Bestimmung Startpunkt und Anfangsrichtung Bestimmung der Drehrichtungen der Kreisel Messung der Beschleunigung und Strecken im fahrzeugfesten Bezugssystem Bestimmung der Transformationsmatrix aus gemessenen Kreiselsignalen Transformation in das Navigationskoordinatensystem

30
Grafische Darstellung
IMU Navigations Computer Kalman- Filter Ergebnis GPS Filter

31
Verwendung in der Praxis
heute wird normalerweise kein DGPS verwendet es werden GPS Empfänger und Sensoren eines Inertialsystems (Koppelortung) zusammengeschaltet reicht für die Praxis aus
 zusammengeschaltet. reicht für die Praxis aus.")
Ähnliche Präsentationen






 Kinetische Energie Kinetik=Lehre von der.>")
: auf Flugzeugen oder auf Satelliten.>")











