Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

2
13. Transformationen mit Matrizen

3
Manche geometrischen Probleme lassen sich leichter lösen, wenn man das Koordinatensystem "geeignet" wählt, d.h. die Vektoren transformiert oder abbildet. Offensichtlich werden lineare Abbildungen durch Matrizen bewirkt. Sei A eine mn Matrix und X eine n1 Matrix, d.h. ein Vektor mit n Komponenten, so führt die Abbildung fA: n m Y = fA(X) = A X auf einen Vektor Y mit m Komponenten. Die Umkehrabbildung ergibt sich mit Hilfe der inversen Matrix A-1 (falls diese existiert) A-1 Y = fA-1(Y) = X.
 = A X. auf einen Vektor Y mit m Komponenten. Die Umkehrabbildung ergibt sich mit Hilfe der inversen Matrix A-1 (falls diese existiert) A-1 Y = fA-1(Y) = X.")
4
Manche geometrischen Probleme lassen sich leichter lösen, wenn man das Koordinatensystem "geeignet" wählt, d.h. die Vektoren transformiert oder abbildet. Offensichtlich werden lineare Abbildungen durch Matrizen bewirkt. Sei A eine mn Matrix und X eine n1 Matrix, d.h. ein Vektor mit n Komponenten, so führt die Abbildung fA: n m Y = fA(X) = A X auf einen Vektor Y mit m Komponenten. surjektiv, nicht injektiv injektiv, nicht surjektiv
 = A X. auf einen Vektor Y mit m Komponenten. surjektiv, nicht injektiv. injektiv, nicht surjektiv.")
5
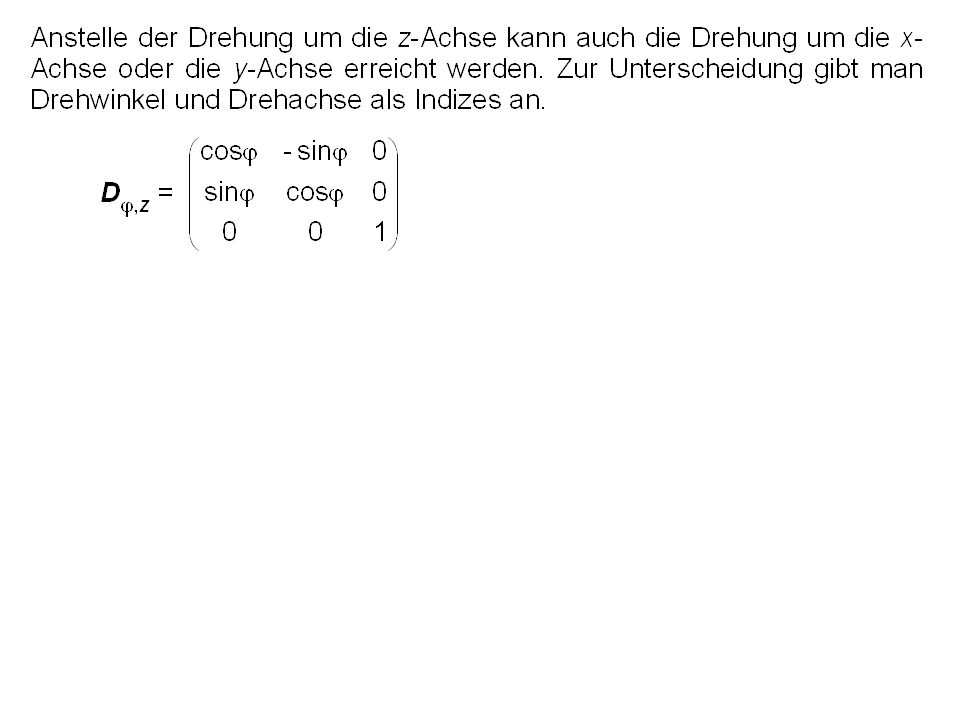
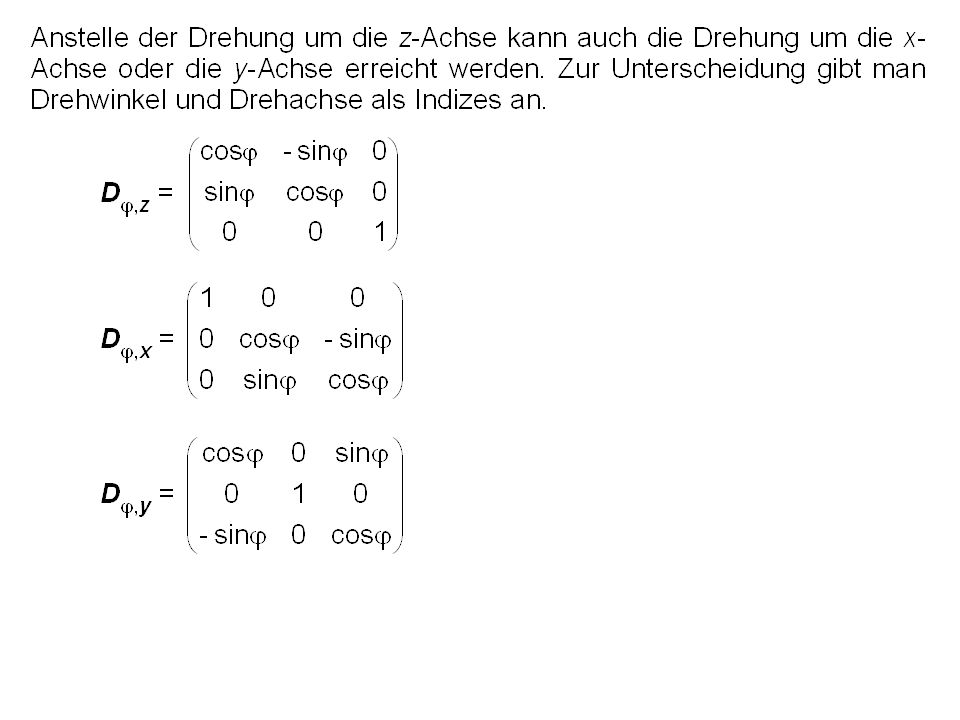
13.1 Drehungen entgegen dem Uhrzeigersinn um den Winkel j um Z0 = W0 (j) = { U0, V0, W0 } = { X0, Y0, Z0 } = (0) U0(0) = X0 U0(j) =
 = X0. U0(j) =")
6
13.1 Drehungen entgegen dem Uhrzeigersinn um den Winkel j um Z0 = W0 (j) = { U0, V0, W0 } = { X0, Y0, Z0 } = (0) U0(0) = X0 U0(j) = V0(j) =
 = X0. U0(j) = V0(j) =")
7
Die Koordinaten eines im gedrehten System (j) festen Vektors
sind in A(j) = D A(0) = =
 = D A(0) = =")
8
Um den Übergang von nach (j) zu finden, benötigen wir die inverse Matrix D-1.
 zu finden, benötigen wir die inverse Matrix D-1.")
9
D-1 = DT Solche Matrizen heißen orthogonale Matrizen. Denselben Effekt erhält man durch Umkehrung der Drehrichtung, d. h. durch Ersetzen von j durch (-j).
.")
17
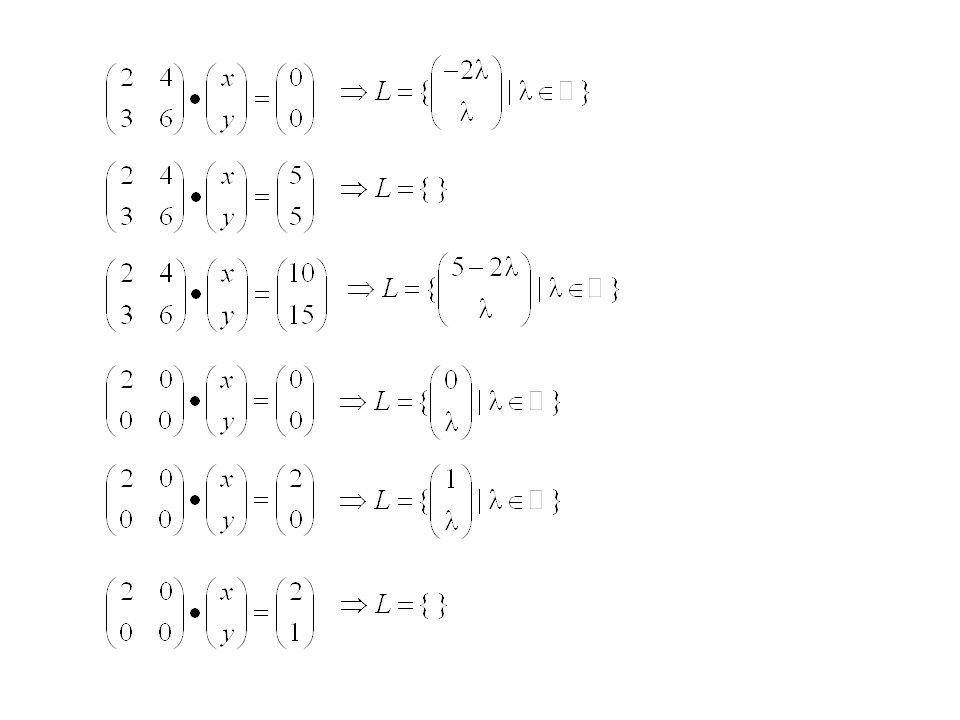
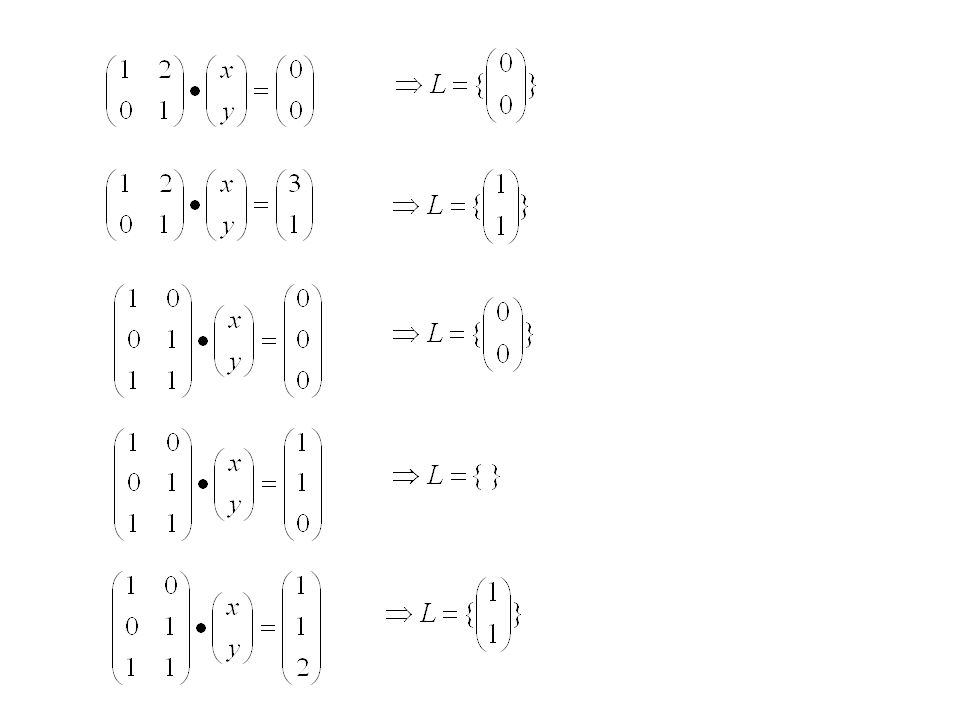
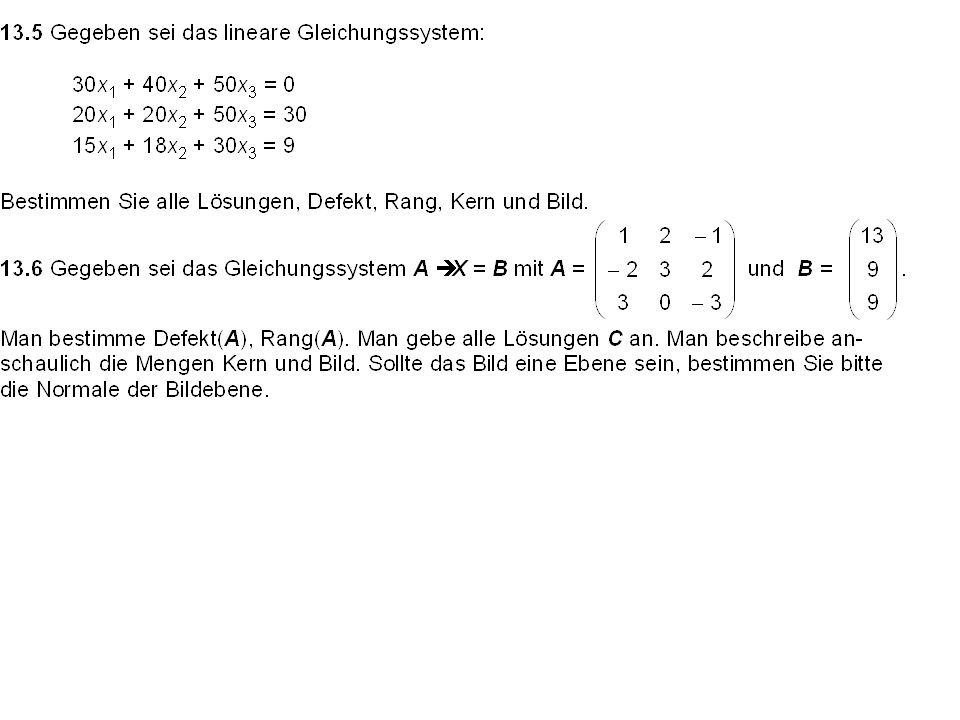
13.4 Lösungsmengen irregulärer linearer Gleichungssysteme
A X = homogen A X = B mit B ≠ 0 inhomogen Sei A C = B Alle anderen Lösungen C' sind dann von der Gestalt C' = C + C* wobei A C* = 0 A (C + C*) = A C + A C* = B = B
 = A C + A C* = B + 0. = B.")
18
Es sei C' eine beliebige und C die bekannte Lösung, dann ist
A (C' - C) = A C' - A C = B B = 0 Also ist (C' - C) = C* C' = C + C* Jedes homogene Gleichungssystem besitzt mindestens eine Lösung, nämlich die triviale Lösung C* = 0. Aber nicht jedes inhomogene Gleichungssystem besitzt eine Lösung. A X = B hat genau eine (bzw. mehrere) Lösung(en) A X = 0 hat genau eine (bzw. mehrere) Lösung(en). A X = 0 hat nur eine Lösung A X = B hat eine oder keine Lösung.
 = A C - A C. = B - B. = 0. Also ist (C - C) = C* C = C + C* Jedes homogene Gleichungssystem besitzt mindestens eine Lösung, nämlich die triviale Lösung C* = 0. Aber nicht jedes inhomogene Gleichungssystem besitzt eine Lösung. A X = B hat genau eine (bzw. mehrere) Lösung(en) A X = 0 hat genau eine (bzw. mehrere) Lösung(en). A X = 0 hat nur eine Lösung. A X = B hat eine oder keine Lösung.")
21
Definition. Die Menge aller Vektoren aus n, die auf den Null-vektor abgebildet werden, also die Lösungsmenge des homo-genen Gleichungssystems, nennen wir Kern der Abbildung: Kern (fA) = { X n | fA(X) = 0 } Kern (fA) ist ein Unterraum des Definitionsbereichs, also des n-dimensionalen Vektorraums, denn Addition zweier Vektoren aus Kern (fA) sowie Multiplikation mit einem Skalar ergibt wieder einen Vektor aus Kern (fA). A X = 0 und A X' = 0 A (X + X') = 0 A X = 0 A lX = l(A X) = l0 = 0 n m
 = { X n | fA(X) = 0 } Kern (fA) ist ein Unterraum des Definitionsbereichs, also des n-dimensionalen Vektorraums, denn Addition zweier Vektoren aus Kern (fA) sowie Multiplikation mit einem Skalar ergibt wieder einen Vektor aus Kern (fA). A X = 0 und A X = 0 A (X + X ) = 0. A X = 0 A lX = l(A X) = l0 = 0. n. m.")
22
Definition. Die Menge aller Vektoren aus m, die Bilder von Vektoren X aus n sind, nennen wir Bild der Abbildung: Bild (fA) = { B m | B = fA(X) } Bild (fA) ist ein Unterraum des m-dimensionalen Bildraums. Sind B und B' Bilder, d. h. A X = B und A X' = B', so ist auch B + B' ein Bild, nämlich von X + X', das mit X und X' auch zum Urbildraum gehört. A X = B und A X' = B' A (X + X') = B + B' A X = B A lX = l(A X) = lB n m
 = { B m | B = fA(X) } Bild (fA) ist ein Unterraum des m-dimensionalen Bildraums. Sind B und B Bilder, d. h. A X = B und A X = B , so ist auch B + B ein Bild, nämlich von X + X , das mit X und X auch zum Urbildraum gehört. A X = B und A X = B A (X + X ) = B + B A X = B A lX = l(A X) = lB. n. m.")
23
Definition. Die Dimension des Kerns dim (Kern (fA)) heißt Defekt der Abbildung.
Definition. Die Dimension des Bildes dim (Bild (fA)) heißt Rang der Abbildung.
) heißt Rang der Abbildung.")
24
Abbildungen mit der mn Matrix A:
(1) Die Lösungsmenge des homogenen Gleichungssystems A X = 0 ist Kern (fA). Das homogene Gleichungssystems besitzt nur eine Lösung Defekt (fA) = 0. (2) Das inhomogene Gleichungssystem A X = B besitzt mindestens eine Lösung C B Bild (fA). (3) Sei C eine solche Lösung, dann ist die gesamte Lösungsmenge von A X = B die Menge { C + Kern (fA) }. A X = B hat dann genau eine Lösung Defekt (fA) = 0. (4) Defekt (fA) + Rang (fA) = dim (n) = n.
 Die Lösungsmenge des homogenen Gleichungssystems. A X = 0. ist Kern (fA). Das homogene Gleichungssystems besitzt nur eine Lösung Defekt (fA) = 0. (2) Das inhomogene Gleichungssystem. A X = B. besitzt mindestens eine Lösung C B Bild (fA). (3) Sei C eine solche Lösung, dann ist die gesamte Lösungsmenge von A X = B die Menge { C + Kern (fA) }. A X = B hat dann genau eine Lösung Defekt (fA) = 0. (4) Defekt (fA) + Rang (fA) = dim (n) = n.")
Ähnliche Präsentationen








 eine Spezifikation mit einer>")


 Matrixkettenprodukt Prof. Dr. Th. Ottmann.>")





>")




 Definition: V sei wieder ein K-Vektorraum. Eine Menge B von Vektoren aus V heißt Basis von V, wenn B ist Erzeugendensystem.>")
 Rangberechnung: Zur Rangberechnung wird man häufig die elementaren Umformungen verwenden. (30.1) Cramersche Regel:>")