Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Der Schrittmotor Kurzfassung der Projektarbeit im SS 2007 von
T. Greiner Studiengang Allgemeine Elektrotechnik Betreuer: Prof. Dr.-Ing. E. Nolle

2
Wann wird er eingesetzt?
Der Schrittmotor Wann wird er eingesetzt? Es wird eine genau definierte Anzahl von Umdrehungen benötigt Es werden Bruchteile von Umdrehungen benötigt

3
Prinzipieller Aufbau Permanentmagnet als Rotor Spulen

4
Großer Schrittwinkel Betriebsarten Vollschrittbetrieb Nachteil:
Vorteile: Umlaufend werden jeweils 2 nebeneinander liegende Spulen gleichzeitig aktiviert. Größeres Dreh- bzw. Haltemoment Der Rotor wird aufgrund des resultierenden Magnetfelds zwischen den beiden aktiven Spulenkörper positioniert. Großer Schrittwinkel unkomplizierte elektronische Ansteuerung

5
Kleineres Dreh- bzw. Haltemoment Kleinere Schrittwinkel
Betriebsarten Halbschrittbetrieb Nachteile: Vorteil: Umlaufend werden nacheinander zunächst ein Spule einzeln, dann 2 nebeneinander liegende Spulen gleichzeitig aktiviert. Kleineres Dreh- bzw. Haltemoment Kleinere Schrittwinkel Der Rotor steht, aufgrund des resultierenden Magnetfelds, einmal genau vor einem Spulenkopf, dann wieder zwischen beiden aktiven Spulenköpfen. Komplizierte elektronische Ansteuerung

6
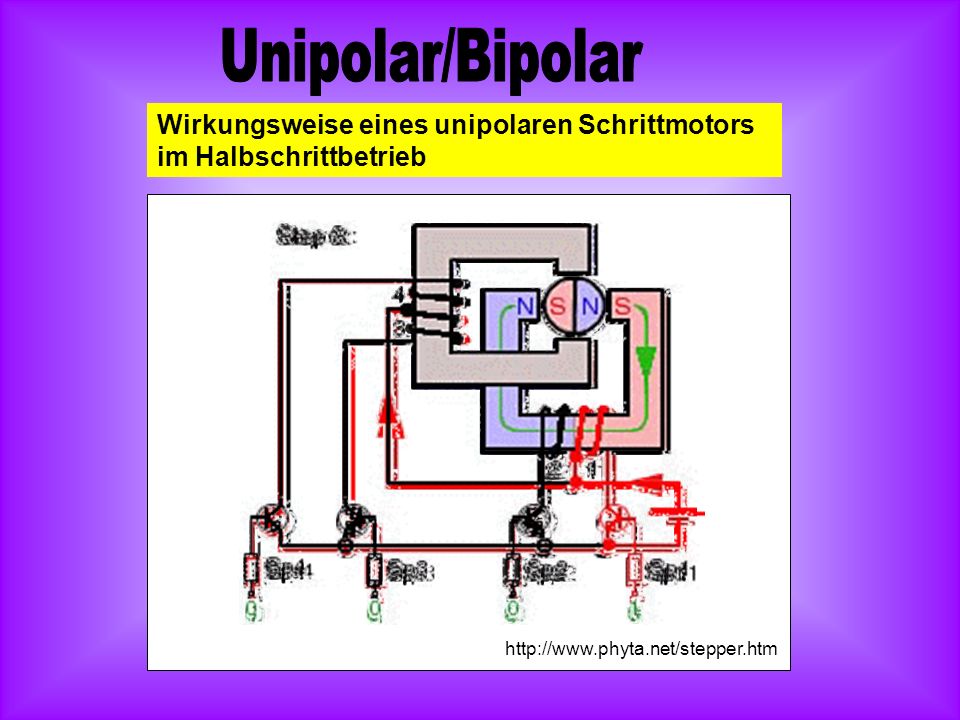
Unipolar/Bipolar Wirkungsweise eines unipolaren Schrittmotors im Halbschrittbetrieb
7
Wirkungsweise eines bipolaren Schrittmotors im Vollschrittbetrieb
Unipolar/Bipolar Wirkungsweise eines bipolaren Schrittmotors im Vollschrittbetrieb

8
Unipolarer Schrittmotor Bipolarer Schrittmotor
Drehkraft Unipolarer Schrittmotor Bipolarer Schrittmotor Wenn ein Schrittmotor zu viele Impulse pro Minute erhält, verliert er seine Drehkraft. Anstieg bis 500 Impulse pro Minute Bei Impulsen pro Minute, nur noch halbe Drehkraft Bei Impulsen pro Minute, keine Drehkraft mehr

9
Vor- / Nachteile von Schrittmotoren
Vorteile: Schrittmotoren lassen sich leicht drehen, wenn gerade keine Wicklung angesteuert ist Einfache Ansteuerung Man muss auch im Stillstand immer eine Wicklung ansteuern um unbeabsichtigtes drehen zu verhindern Man weiß um wie viel Grad sich der Rotor gedreht hat Das führt zu hohem Stromverbrauch auch im Stillstand Genaue Positionierung Wärmeentwicklung auch im Stillstand.

10
Anwendung bei: - Bewegung von Roboterarmen
- Kopfpositionierung in Diskettenlaufwerken - Drehung der Papierwalze in Drucker und elektronischen Schreibmaschinen - Gravier- und Fräsmaschinen - Zeigerbewegung in Anzeigeinstrumenten - usw.

Ähnliche Präsentationen



















