Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Software-Engineering II Eingebettete Systeme, Softwarequalität, Projektmanagement
Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für Rechnerarchitektur und Softwaretechnik

2
Hinweis: Am Freitag entfällt die Vorlesung!
(Projekttreffen IMMOS) Hinweis: Nächsten Freitag entfällt die Vorlesung ebenfalls! (Tagung M4M – Methods for Modalities) (Mittwoch findet sie aber statt!) (Übungsblattausgabe)
 Hinweis: Nächsten Freitag entfällt die Vorlesung ebenfalls! (Tagung M4M – Methods for Modalities) (Mittwoch findet sie aber statt!) (Übungsblattausgabe)")
3
nächstes Übungsblatt …
4
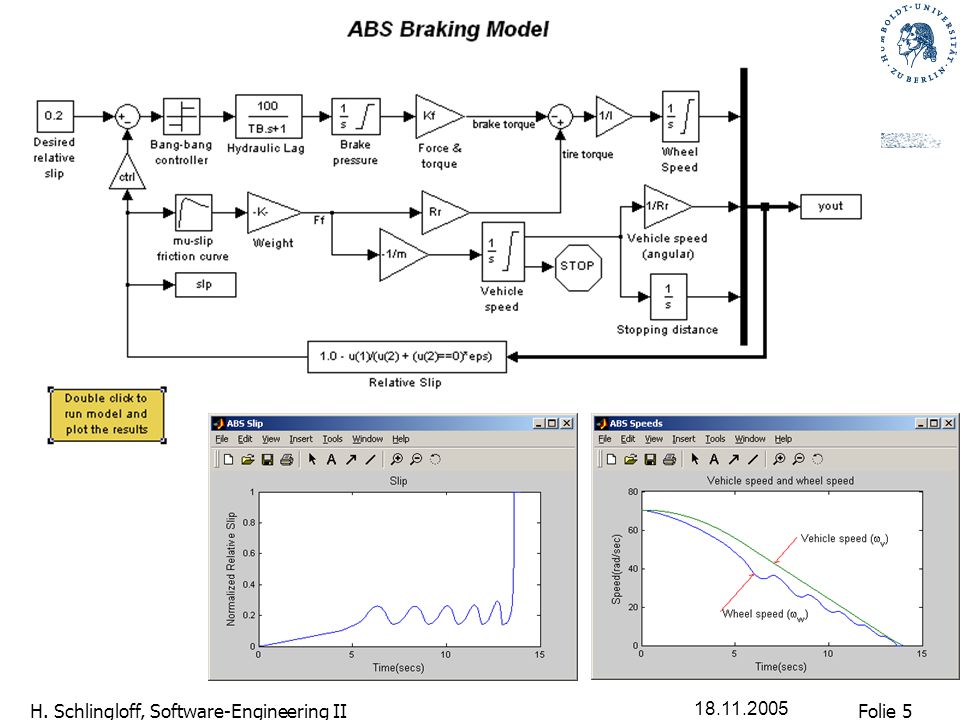
SimuLink Modellierung durch Datenflussdiagramm
jede „Leitung“ entspricht einer Variablen

6
Abstraktion Hauptstärke von SimuLink besteht in der Möglichkeit, Blöcke zusammenzufassen Abstraktion von Verhalten baumartige Navigation Parametrisierung Modulbibliotheken externe Erweiterungen Codeanbindung Modelltransformation und –entwicklung!

7
Beispiel: Fensterheber
8
Kurzüberblick über das IMMOS-Projekt
Projekttitel: IMMOS – Eine integrierte Methodik zur modellbasierten Steuergeräteentwicklung für den Automobilbereich Laufzeit: Januar 2004 – Juni 2006 Ziele: Definition einer integrierten Software-Entwicklungsmethodik für Steuergeräte im KFZ und Erprobung dieser Methodik durch die Entwicklung eines automobilen Demonstrators Projektpartner: Fraunhofer FIRST, DaimlerChrysler AG, dSPACE GmbH, IT Power Consultants, FZi / Universität Karlsruhe, c-Lab / Universität Paderborn Mittel: 285 PM

9
modellbasierte Entwicklung
frühzeitige Erstellung eines ausführbaren Modells (Systemmodell) auf Grundlage der Anforderungen Test und Erprobung auf Modellebene Verfeinerung zum Implementierungs- modell automatische Code- generierung für Host und Target automatische Testgenerierung
 auf Grundlage der Anforderungen. Test und Erprobung auf Modellebene. Verfeinerung zum Implementierungs- modell. automatische Code- generierung für Host und Target. automatische Testgenerierung")
10
Aktivitäten und Artefakte
Lastenheft formale Spezifikation Virtueller Prototyp Testfälle Target-Code Prototyping Modellierung Verifikation Codegenerierung Testgenerierung Zusätzlicher Code Zielsystem Integration Testausführung Portierung Formalisierung Implementierungs- modell Verfeinerung Systemmodell

11
Modellierungsformalismen
herkömmliche Formalismen: Zustandsmaschinen, Diagramme, Petrinetze, StateCharts, Message Sequence Charts, ... gut etabliert, Toolunterstützung vorhanden Wildwuchs, Varianten, mangelnde Konstanz Prognose: werden durch UML2.0 abgelöst werden UML 2.0 vereinigt verschiedene Arten von Diagrammen extrem mächtig, sehr umfangreich zu lernen fehlende Semantik, verschiedene Ausbaustufen Matlab / Simulink / Stateflow teilweise gut eingeführt und bekannt limitierte Ausdrucksfähigkeit nur eine Quelle logische und algebraische Modelle, z.B. TLA, ASM/ASML, CSP nahe an natürlichsprachlichen Formulierungen Forschungsbedarf

12
Pause! „Bist du sicher, dass du kein Modell brauchst?“

13
Noch einer Google „model cartoon“

14
Thanks for the slides: Daniela Weinberg
Codegenerierung Ziel: automatische Übersetzung von Modellen in ausführbaren (C-) Code zwei kommerzielle Produkte verfügbar Real Time Workshop (The MathWorks) TargetLink (dSPACE GmbH) Codegenerator ist „Compiler für Modelle“ Wiederverwendung schnelle Prototyp- und Produkterstellung erhöhte Zuverlässigkeit gegen Programmierfehler automatische Optimierung des generierten Codes Wie kann man sicherstellen, dass der generierte Code das Erwartete leistet? Thanks for the slides: Daniela Weinberg Quelle: dSPACE GmbH
 Code. zwei kommerzielle Produkte verfügbar. Real Time Workshop (The MathWorks) TargetLink (dSPACE GmbH) Codegenerator ist „Compiler für Modelle Wiederverwendung. schnelle Prototyp- und Produkterstellung. erhöhte Zuverlässigkeit gegen Programmierfehler. automatische Optimierung des generierten Codes. Wie kann man sicherstellen, dass der generierte Code das Erwartete leistet Thanks for the slides: Daniela Weinberg. Quelle: dSPACE GmbH")
15
Prinzip

16
Beispiel Schaltsystem mit Schwellwert 0.5
physikalisches Modell (SimuLink) Implementierungsmodell (TargetLink) Äquivalenz?
 Implementierungsmodell (TargetLink) Äquivalenz")
17
generierter Code Zweierpotenz-Skalierung; 128 * 2-8 = 0.5
Void switch_system(Void) { /* Switchswitch_system/switch_primitive */ if (Sa1_Input2_ >= 128 /* 0.5 */) { /* # combined # Outport: switch_system/OutputPort */ Sa1_OutputPort_ = Sa1_Input1_; } else {
 { /* Switchswitch_system/switch_primitive */ if (Sa1_Input2_ >= 128 /* 0.5 */) { /* # combined # Outport: switch_system/OutputPort */ Sa1_OutputPort_ = Sa1_Input1_; } else {")
18
Codeabsicherung Qualitätssicherung auf jeder Ebene notwendig!
(c) generierter Code (a) Modell (b) Code- Generator (d) Code Ausführung Physical Model (floating - point) Compiler (Linker) Host PC Code generator C Code Target Implementation Model (fixed - point) Cross - compiler (Linker / Loader ) Qualitätssicherung auf jeder Ebene notwendig!
 generierter. Code. (a) Modell. (b) Code- Generator. (d) Code. Ausführung. Physical Model. (floating - point) Compiler. (Linker) Host PC. Code. generator. C Code. Target. Implementation Model. (fixed - point) Cross. - compiler. (Linker / Loader. ) Qualitätssicherung auf jeder Ebene notwendig!")
19
QS auf Modellebene Modellierungsrichtlinien
Qualität des Implementierungsmodells ausschlaggebend für Qualität des generierten Codes Richtlinien und Muster existieren (z.B. MathWorks Automotive Advisory Board - MAAB guidelines) Toolunterstützung zur Umsetzung der Richtlinien demnächst Vorteile Lesbarkeit Wartbarkeit Wiedervervendbarkeit Testbarkeit
 Toolunterstützung zur Umsetzung der Richtlinien. demnächst Vorteile. Lesbarkeit. Wartbarkeit. Wiedervervendbarkeit. Testbarkeit")
20
modellbasierter Test Simulation /Ausführung des Modells und generierten Codes in verschiedenene Entwicklungsphasen MiL (Model in the Loop) SiL (Software in the Loop) PiL (Processor in the Loop) HiL (Hardware in the Loop) þ ý test output result comparison physical model implementation model test stimuli C code (target) ECU MiL (physical model) MiL (impl. model) SiL PiL C code (host)
 SiL (Software in the Loop) PiL (Processor in the Loop) HiL (Hardware in the Loop) » þ. ý. test output. result. comparison. physical model. implementation model. test stimuli. C code (target) ECU. MiL (physical model) MiL (impl. model) SiL. PiL. C code (host)")
21
Szenarien für Testautomatisierung
Requirements Modell Code Testsuite Requirements Modell Code Testsuite UseCases

22
Absicherung von Codegeneratoren
Probleme häufige Generationenfolge von Prozessoren und Codegeneratoren Notwendigkeit zusätzlicher Absicherung Ansatz in IMMOS Validationssuite für Codegeneratoren Graph-Transformationen als logische Basis Modellgenerator Testfallgenerator Transformationsregeln Simulator Modell Codegenerator Code Comparator Simulationsergebnisse Ausführungsergebnisse Target

23
Im Beispiel test cases optimization test module optimization rule
test vectors 0.3 test model Input1(t) 1.0 0.5 Input2(t) test cases optimization test module optimization rule test model test vector LHS RHS r model generator ModeSSa test vector generator Reactis, ET-Tool
 Input2(t) test cases optimization test module. optimization rule. test model. test vector. LHS. RHS. r. model generator. ModeSSa. test vector generator. Reactis, ET-Tool")
Ähnliche Präsentationen


>")


Modulators auf einem Spartan 3E FPGA>")













