Präsentation herunterladen
Die Präsentation wird geladen. Bitte warten

1
Datenstrukturen und Algorithmen in Open Street Map
Modul: Algorithmische Geometire Von: Elisabeth Lehmann 12INB-P

2
Inhalte Was ist OpenStreetMap? Das Konzept Datenstrukturen in OSM
Node Way Relation Tags OSM-Format 4) Algorithmen Allgemeine Vorgehensweise Abstraktionsverfahren Dijkstra- Algorithmus/beidseitiger Dijkstra HISPA-Algorithmus A*-Algorithmus Contraction Hierarchies 5) Quellen
 Algorithmen. Allgemeine Vorgehensweise. Abstraktionsverfahren. Dijkstra- Algorithmus/beidseitiger Dijkstra. HISPA-Algorithmus. A*-Algorithmus. Contraction Hierarchies. 5) Quellen.")
3
1) Was ist OpenStreetMap?
ein 2004 gegründetes Projekt einer freien Weltkarte Sammlung von verschiedenen Daten, welche selbst erhoben werden -> darf lizenzkostenfrei eigesetzt und beliebig weiterverarbeitet werden

4
2) Das Konzept das Routing (Wegwahlfunktion) steht im Vordergrund
optisches darstellen von Straßenattributen Aufgabengebiete für die Funktionalität geografische Rohdaten Anwendungsprogrammierung Rendering Beispiel: OSMarelmon

5
3) Datenstrukturen in OSM
a) Node kleinstes OSM-Objekt bilden Gerüst der OSM-Karte Bestimmen zum Beispiel Verläufe von Straßen, Umrisse von Grundstücken, Ecken von Häusern repräsentieren GPS-Punkte besitzen ID, Breitengrad und Längengrad, Versionsnummer, Zeitstempel Changeset-ID enthält letztes Bearbeitungsdatum des Knoten (mit dazugehöriger User-ID)
 Node. kleinstes OSM-Objekt. bilden Gerüst der OSM-Karte. Bestimmen zum Beispiel Verläufe von Straßen, Umrisse von Grundstücken, Ecken von Häusern. repräsentieren GPS-Punkte. besitzen ID, Breitengrad und Längengrad, Versionsnummer, Zeitstempel. Changeset-ID enthält letztes Bearbeitungsdatum des Knoten (mit dazugehöriger User-ID)")
6
b) Way ein Way besteht aus mindestens zwei Knoten
verknüpft diese miteinander stellen jegliche Arten von Verbindungen zwischen Punkten her (in Array gespeichert) zum Beispiel Uferverläufe oder Straßen mit gleichem Knoten als Start-und Endpunkt entstehen Flächen gleiche Metatags wie Nodes (ohne Breiten-und Längengrad) einzelnen Knoten als Referenztags eingebunden
 zum Beispiel Uferverläufe oder Straßen. mit gleichem Knoten als Start-und Endpunkt entstehen Flächen. gleiche Metatags wie Nodes (ohne Breiten-und Längengrad) einzelnen Knoten als Referenztags eingebunden.")
7
<way id=" " version="16" timestamp=" T23:41:09Z" changeset =" " uid=" " user="perihel"> <nd ref=" "/> <nd ref=" "/ > <nd ref=" "/ > <nd ref=" "/> </way>

8
c) Relation größter und umfassendster Datentyp in OSM
erfassen komplexer und abstrakter Formen Zum Beispiel Abbiegevorschriften Buslinien besitzt Referenzen (Member genannt)auf Konten, Wege und andere Relationen
auf Konten, Wege und andere Relationen.")
9
<relation id=" " version="2" timestamp=" T20:41:04Z" changeset =" " uid=" " user="perihel"> <member type="node" ref=" „ role="stop"/> <member type="node" ref="213127" role="platform"/> <member type="way" ref=" " role=""/> <member type="relation" ref=" " role=""/> </relation>

10
<tag k="maxspeed:winter" v="60">
d) Tags Datenstrukturen bieten Metatags und vom Benutzer frei handhabbare Tags vor dem Endtag wird Benutzer die Möglichkeit geboten, selbst definierte Tags einzufügen bestehen aus key-value-Paaren (wobei key angibt, was Relation beschreibt) <tag k="maxspeed:winter" v="60">
 Tags. Datenstrukturen bieten Metatags und vom Benutzer frei handhabbare Tags. vor dem Endtag wird Benutzer die Möglichkeit geboten, selbst definierte Tags einzufügen. bestehen aus key-value-Paaren. (wobei key angibt, was Relation beschreibt) <tag k= maxspeed:winter v= 60 >")
11
e) OSM-Format Speicherung sämtlicher Daten in OSM XML
Minimal-und Maximalfunktionen können verwendet werden Reihenfolge der Objekte: Knoten Wege Relationen, deren Referenzen und Tags einfach lesbar, systemunabhängig, nur Parser muss vorhanden sein durch Größe der Dateien Kompression nötig zum Beispiel planet.osm mit 400GB komprimiert, komprimeirt nur 29GB

12
4) Algorithmen viele verschiedene Algorithmen, da unterschiedliche Funktionen angefragt werden Hauptteil bildet die Routen-Planung jedoch auch im Bereich der Geschwindigkeitsmessung oder von Höhenunterschieden

13
a) allgemeines Vorgehen
sammeln der Attribute zu jedem OSM- Objekt Speichern der Koordinaten des Knoten Knoten beim Einlesen des Weges gespeichert Bestimmen des geeignet Weges ungeeignete Wege verwerfen zulässige Richtung und Geschwindigkeit bestimmen Weg bestimmen

14
b) Abstraktionsverfahren
graphen-ähnliche Darstellung bestehend aus Segment-Node (analog Knoten), Segment (gerichtete Verbindungen), Restriction (nicht nutzbare Verbindungen) Segment-Nodes und Segments können jedoch nicht einfach als Knoten bzw. Kanten des Graphen verwendet werden -> Restrictions müssen berücksichtigt werden
, Segment (gerichtete Verbindungen), Restriction (nicht nutzbare Verbindungen) Segment-Nodes und Segments können jedoch nicht einfach als Knoten bzw. Kanten des Graphen verwendet werden. -> Restrictions müssen berücksichtigt werden.")
15
c) Dijkstra-Algorithmus (1959)
Bestimmung des kürzesten Weges unter Berücksichtigung des Kantengewichts (zum Beispiel der benötigten Zeit) Problem bei der Routenplanung: die kürzeste Strecke ist nicht unbedingt die schnellste ->mehrere Attribute pro Kante eingefügt (Entfernung [km], sondern auch Zeit [min]) О(E + V *log(V)) V=Knotenmenge, E=Kantenmenge
 Problem bei der Routenplanung: die kürzeste Strecke ist nicht unbedingt die schnellste. ->mehrere Attribute pro Kante eingefügt (Entfernung [km], sondern auch Zeit [min]) О(E + V *log(V)) V=Knotenmenge, E=Kantenmenge.")
17
d) HISPA-Heuristik Hierarchical shortest path
sucht kürzesten Weg von zwei Endknoten zu Knoten der obersten Hierarchieebene im Umkreis mit gegebenen Radius Zum Beispiel von Stadt zu Autobahnkreuz

18
e) A*-Algorithmus Finde den kürzesten von Arad nach Buadpest
 A*-Algorithmus Finde den kürzesten von Arad nach Buadpest")
19
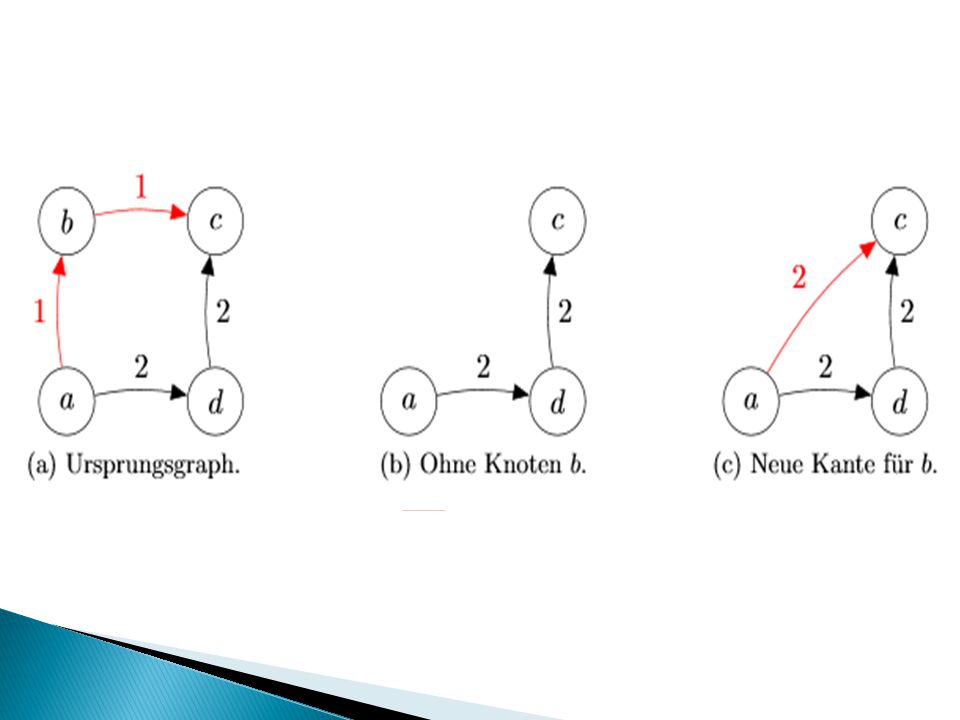
f) Contraction Hierarchies
Routing-Algorithmus derzeitige Grundlage für mobile Navigation bei westeuropäischen Straßennetz etwa mal schneller als Dijkstra Suchanfragen in unter 1ms beantwortet wenn nur Distanz und nicht Route abgefragt wird, verbraucht sogar Datenstruktur weniger Speicherplatz

21
Quellen passau.de/fileadmin/files/lehrstuhl/sauer/geyer/ BA_SebastianBrunner_ pdf ftp://ftp.informatik.uni- stuttgart.de/pub/library/medoc.ustuttgart_fi/DIP -3232/DIP-3232.pdf knerr.de/bachelorarbeit/Bachelorarbeit.pdf muenster.de/teaching/ws05/kiWS05/script/KI- Kap04-2.pdf osm

Ähnliche Präsentationen







 Weg>")



 Prof. Th. Ottmann.>")



>")



>")
